
一种气动驱动主、被动关节混合式中医推拿机器人.pdf

一只****呀淑


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种气动驱动主、被动关节混合式中医推拿机器人.pdf
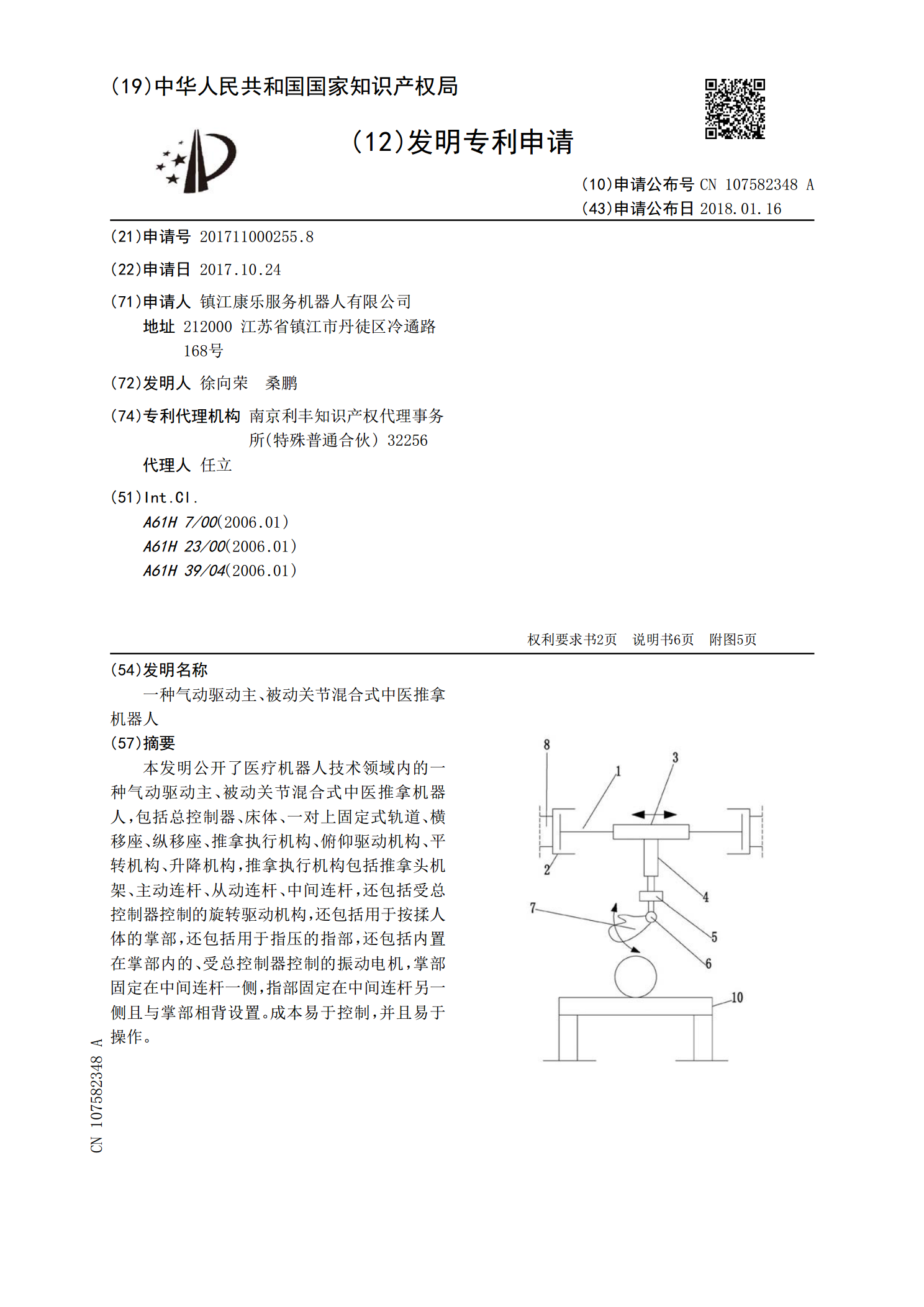
本发明公开了医疗机器人技术领域内的一种气动驱动主、被动关节混合式中医推拿机器人,包括总控制器、床体、一对上固定式轨道、横移座、纵移座、推拿执行机构、俯仰驱动机构、平转机构、升降机构,推拿执行机构包括推拿头机架、主动连杆、从动连杆、中间连杆,还包括受总控制器控制的旋转驱动机构,还包括用于按揉人体的掌部,还包括用于指压的指部,还包括内置在掌部内的、受总控制器控制的振动电机,掌部固定在中间连杆一侧,指部固定在中间连杆另一侧且与掌部相背设置。成本易于控制,并且易于操作。
一种用于关节驱动的主被动混合驱动装置.pdf
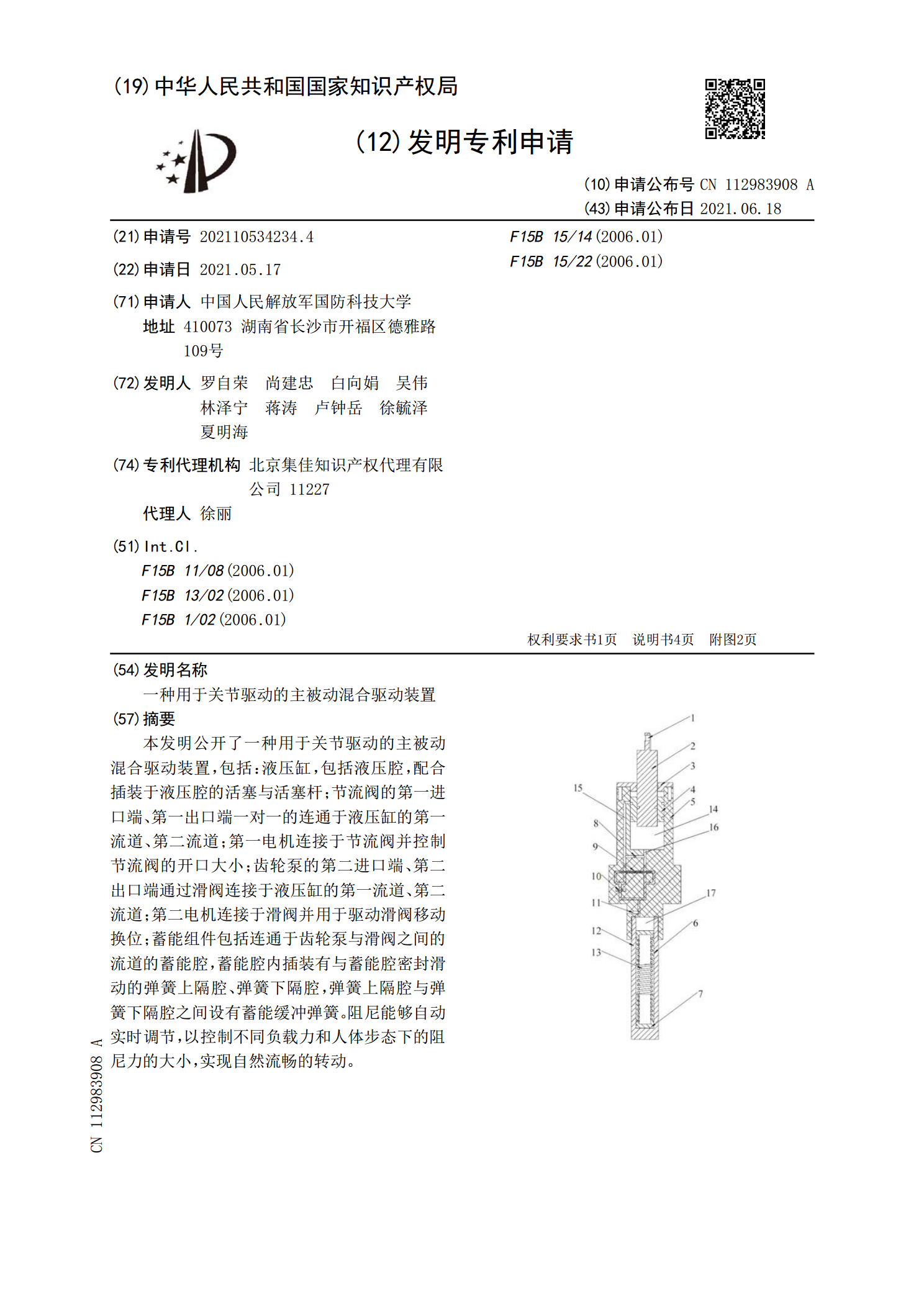
本发明公开了一种用于关节驱动的主被动混合驱动装置,包括:液压缸,包括液压腔,配合插装于液压腔的活塞与活塞杆;节流阀的第一进口端、第一出口端一对一的连通于液压缸的第一流道、第二流道;第一电机连接于节流阀并控制节流阀的开口大小;齿轮泵的第二进口端、第二出口端通过滑阀连接于液压缸的第一流道、第二流道;第二电机连接于滑阀并用于驱动滑阀移动换位;蓄能组件包括连通于齿轮泵与滑阀之间的流道的蓄能腔,蓄能腔内插装有与蓄能腔密封滑动的弹簧上隔腔、弹簧下隔腔,弹簧上隔腔与弹簧下隔腔之间设有蓄能缓冲弹簧。阻尼能够自动实时调节,
一种主被动混合式假肢膝关节.pdf
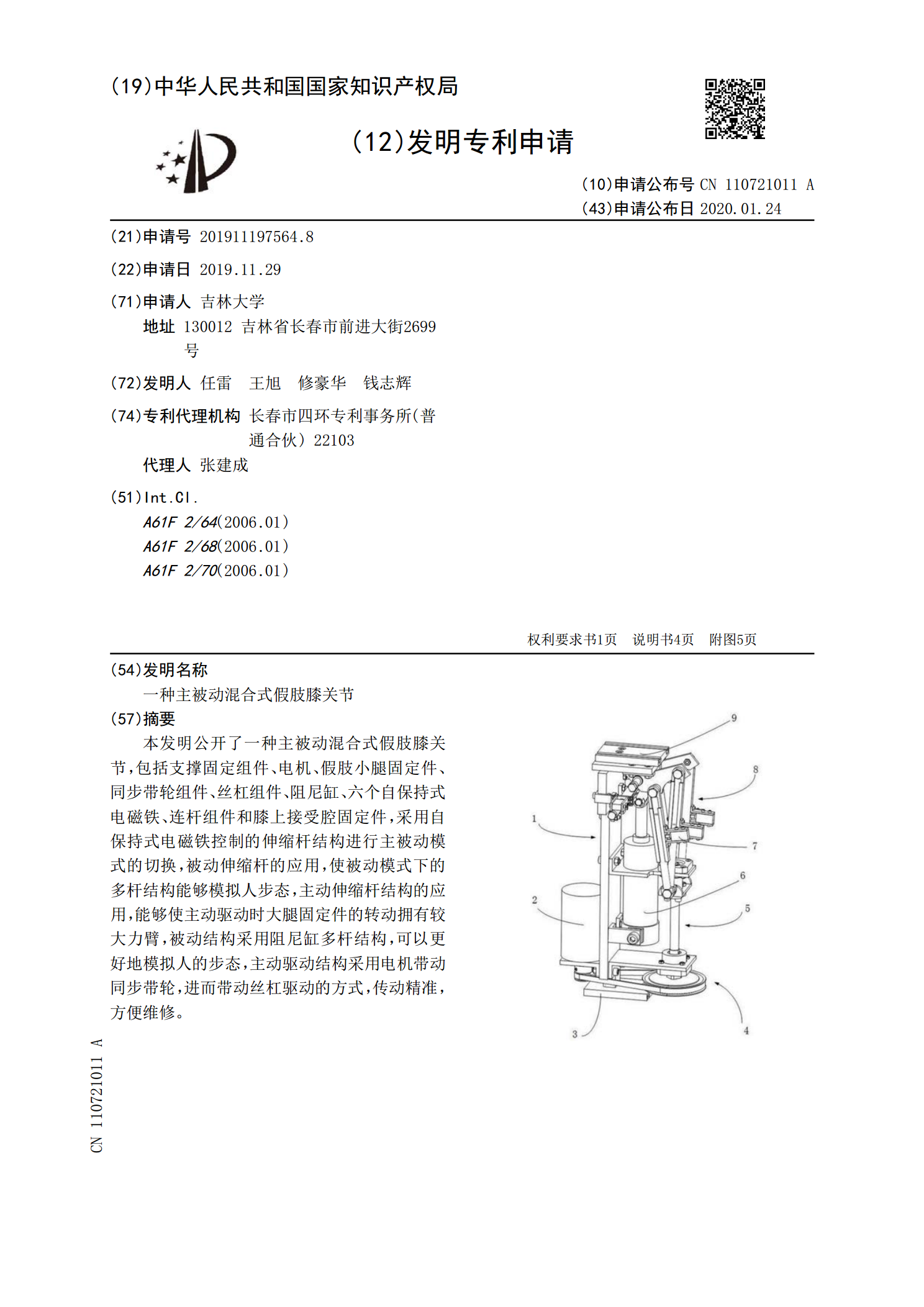
本发明公开了一种主被动混合式假肢膝关节,包括支撑固定组件、电机、假肢小腿固定件、同步带轮组件、丝杠组件、阻尼缸、六个自保持式电磁铁、连杆组件和膝上接受腔固定件,采用自保持式电磁铁控制的伸缩杆结构进行主被动模式的切换,被动伸缩杆的应用,使被动模式下的多杆结构能够模拟人步态,主动伸缩杆结构的应用,能够使主动驱动时大腿固定件的转动拥有较大力臂,被动结构采用阻尼缸多杆结构,可以更好地模拟人的步态,主动驱动结构采用电机带动同步带轮,进而带动丝杠驱动的方式,传动精准,方便维修。
一种主被动结合式膝关节外骨骼机器人.pdf
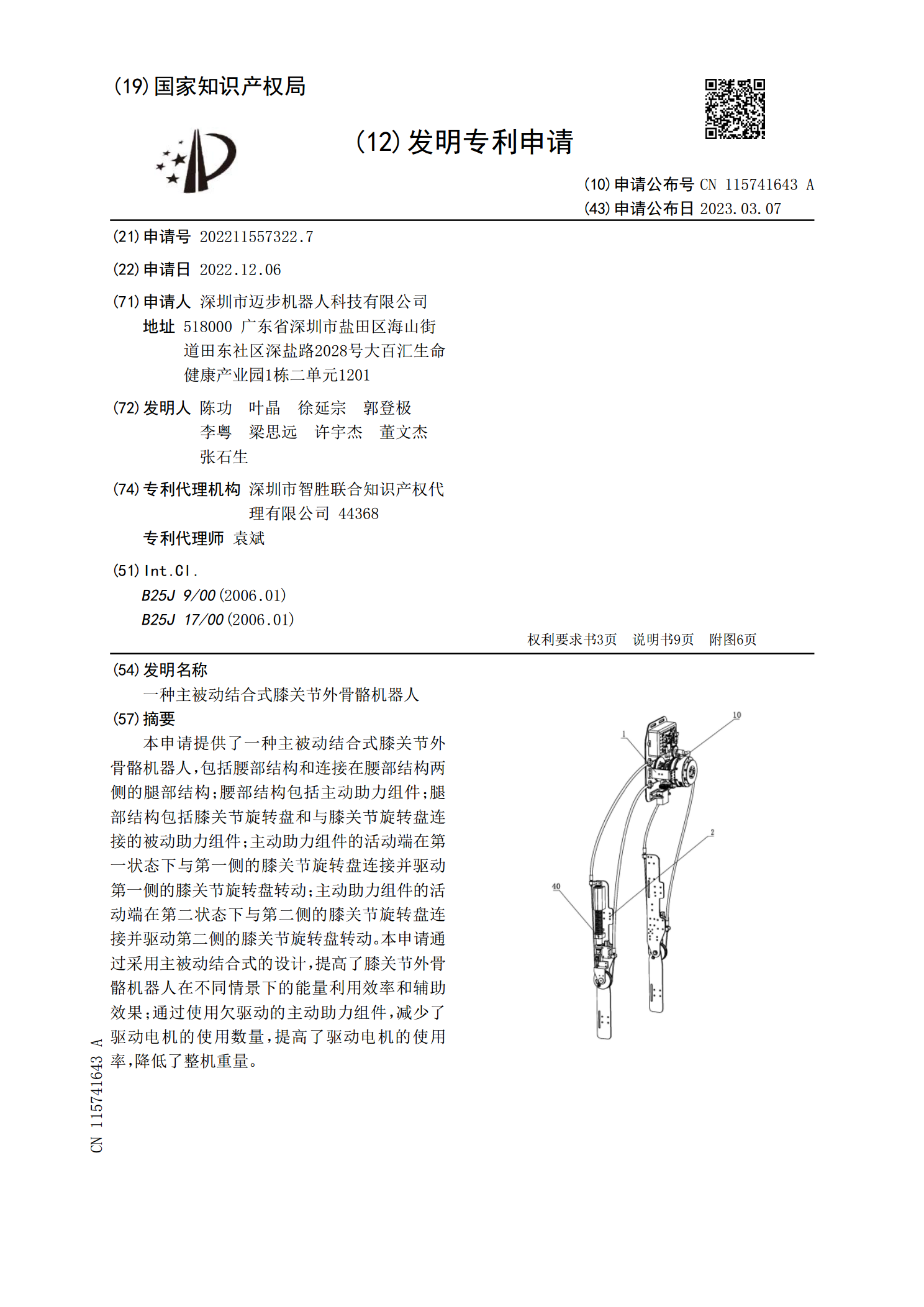
本申请提供了一种主被动结合式膝关节外骨骼机器人,包括腰部结构和连接在腰部结构两侧的腿部结构;腰部结构包括主动助力组件;腿部结构包括膝关节旋转盘和与膝关节旋转盘连接的被动助力组件;主动助力组件的活动端在第一状态下与第一侧的膝关节旋转盘连接并驱动第一侧的膝关节旋转盘转动;主动助力组件的活动端在第二状态下与第二侧的膝关节旋转盘连接并驱动第二侧的膝关节旋转盘转动。本申请通过采用主被动结合式的设计,提高了膝关节外骨骼机器人在不同情景下的能量利用效率和辅助效果;通过使用欠驱动的主动助力组件,减少了驱动电机的使用数量,
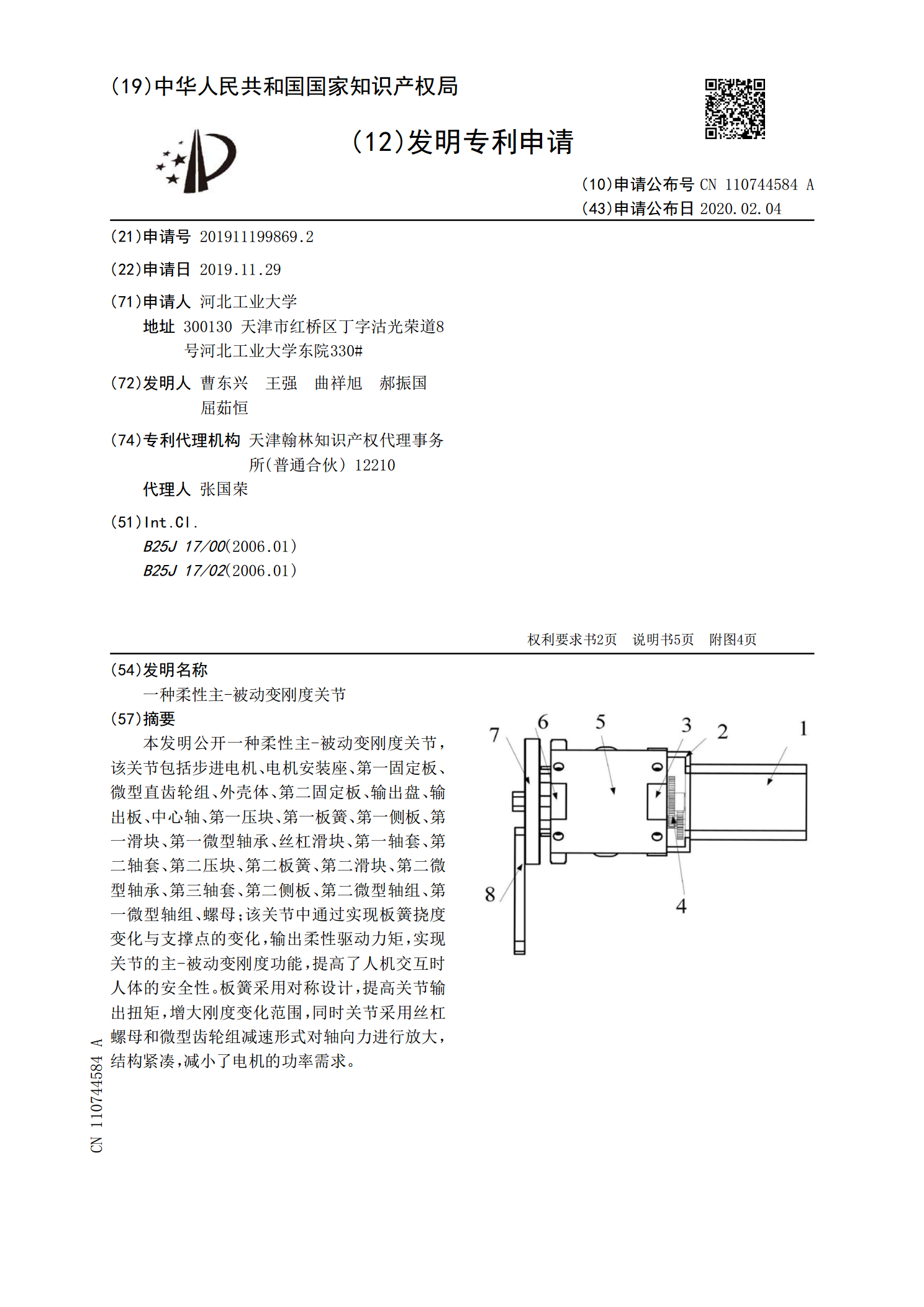
一种柔性主-被动变刚度关节.pdf
本发明公开一种柔性主‑被动变刚度关节,该关节包括步进电机、电机安装座、第一固定板、微型直齿轮组、外壳体、第二固定板、输出盘、输出板、中心轴、第一压块、第一板簧、第一侧板、第一滑块、第一微型轴承、丝杠滑块、第一轴套、第二轴套、第二压块、第二板簧、第二滑块、第二微型轴承、第三轴套、第二侧板、第二微型轴组、第一微型轴组、螺母;该关节中通过实现板簧挠度变化与支撑点的变化,输出柔性驱动力矩,实现关节的主‑被动变刚度功能,提高了人机交互时人体的安全性。板簧采用对称设计,提高关节输出扭矩,增大刚度变化范围,同时关节采用