
移动机器人的位姿估计方法.pdf

佳宁****么啦


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

移动机器人的位姿估计方法.pdf
本发明揭示了一种移动机器人的位姿估计方法,所示移动机器人包括全景摄像头,其特征在于,包括以下步骤:S1:初始化或获取移动机器人在参考位置的位姿信息及全景图像P
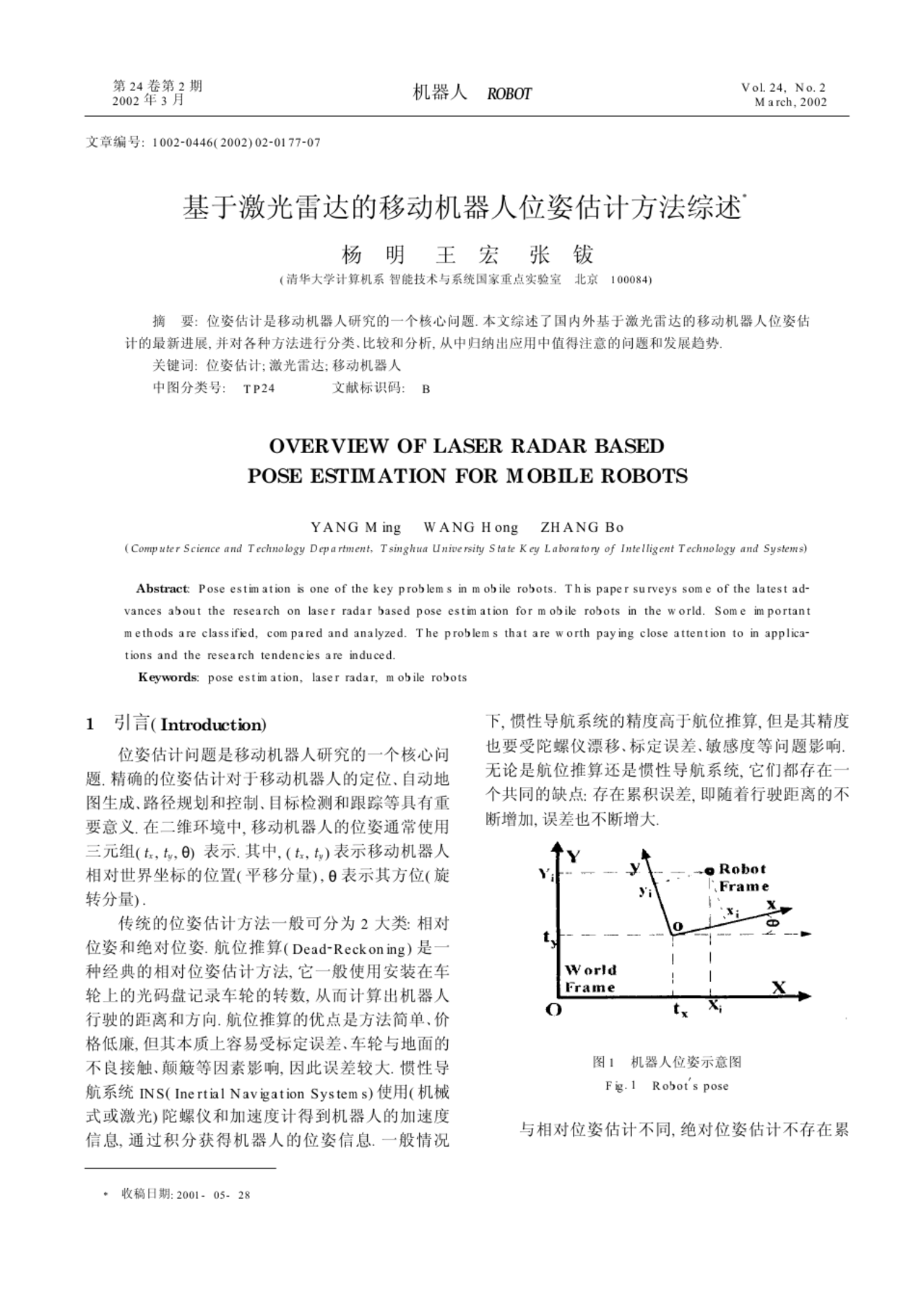
基于激光雷达的移动机器人位姿估计方法综述.pdf
位姿估计方法、装置、设备及介质.pdf
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的轮速计观测数据;根据预设轮速计模型和车辆运动学模型,获取轮速计观测数据表征的车辆名义状态的时间导数;对轮速计观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义位姿增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的轮速计误差置信度;根据指定传感器在T时刻观测数据和T+1时刻观测数据、轮速计观测数据对应的名义位
位姿估计方法、装置、设备及介质.pdf
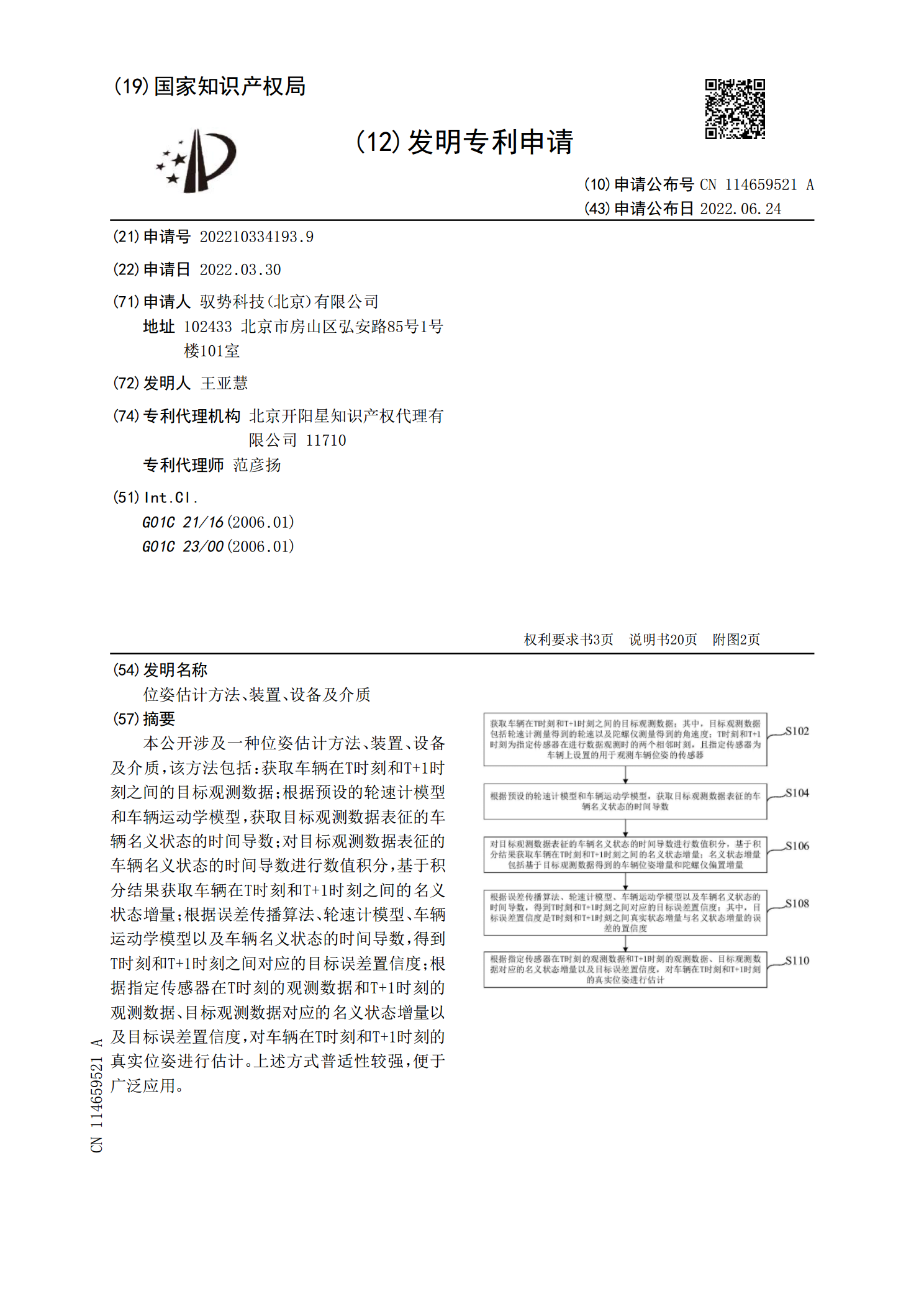
本公开涉及一种位姿估计方法、装置、设备及介质,该方法包括:获取车辆在T时刻和T+1时刻之间的目标观测数据;根据预设的轮速计模型和车辆运动学模型,获取目标观测数据表征的车辆名义状态的时间导数;对目标观测数据表征的车辆名义状态的时间导数进行数值积分,基于积分结果获取车辆在T时刻和T+1时刻之间的名义状态增量;根据误差传播算法、轮速计模型、车辆运动学模型以及车辆名义状态的时间导数,得到T时刻和T+1时刻之间对应的目标误差置信度;根据指定传感器在T时刻的观测数据和T+1时刻的观测数据、目标观测数据对应的名义状态增
面向位姿估计的遮挡场景目标检测方法.pdf
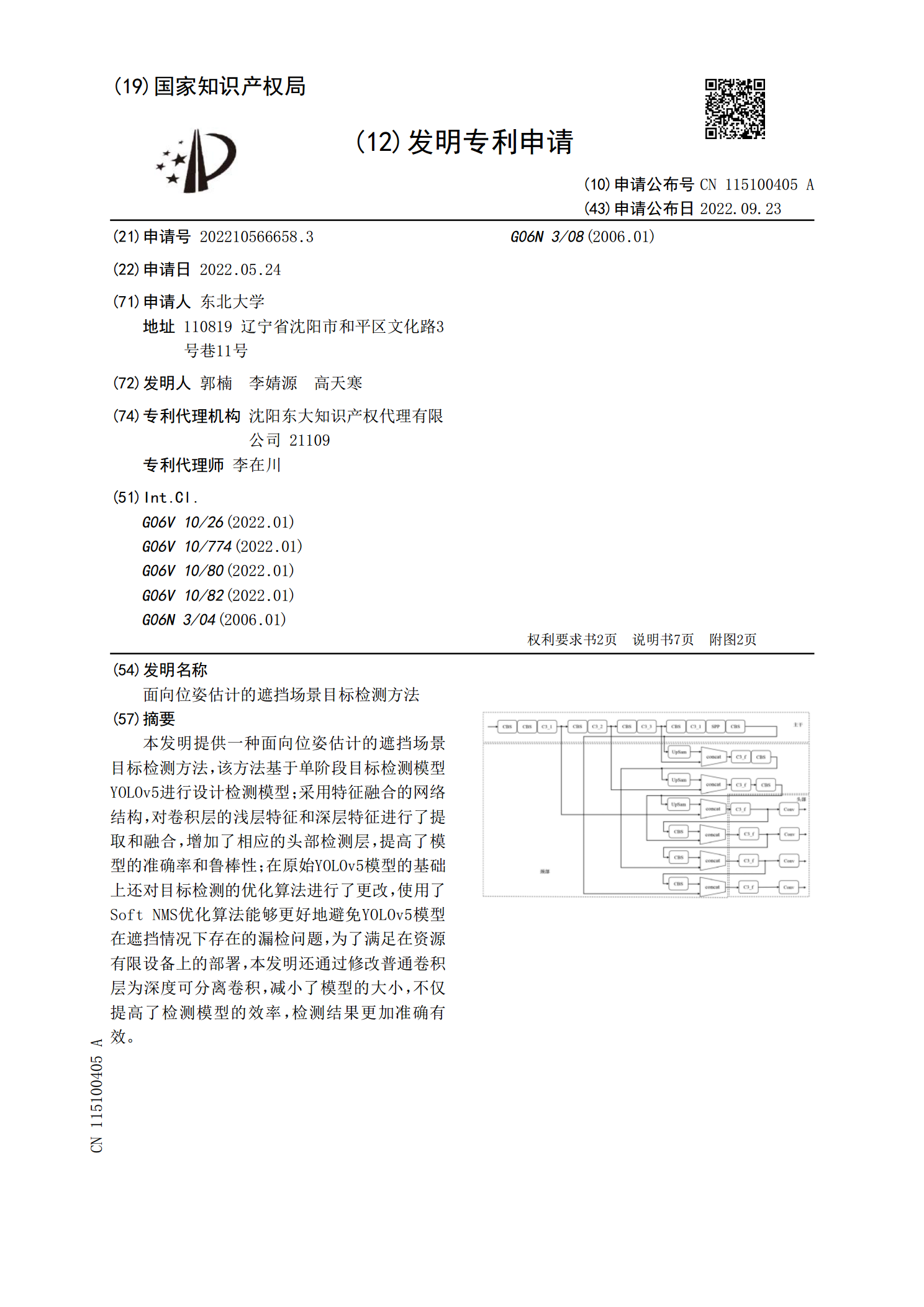
本发明提供一种面向位姿估计的遮挡场景目标检测方法,该方法基于单阶段目标检测模型YOLOv5进行设计检测模型;采用特征融合的网络结构,对卷积层的浅层特征和深层特征进行了提取和融合,增加了相应的头部检测层,提高了模型的准确率和鲁棒性;在原始YOLOv5模型的基础上还对目标检测的优化算法进行了更改,使用了SoftNMS优化算法能够更好地避免YOLOv5模型在遮挡情况下存在的漏检问题,为了满足在资源有限设备上的部署,本发明还通过修改普通卷积层为深度可分离卷积,减小了模型的大小,不仅提高了检测模型的效率,检测结果