
一种自动驾驶决策方法及系统.pdf

贤惠****66


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动驾驶决策方法及系统.pdf
本发明实施例提供一种自动驾驶决策方法,属于自动驾驶领域。该自动驾驶决策方法包括:采集车辆驾驶系统的决策模型的输入数据和输出数据;根据所述决策模型的输入数据和输出数据对所述决策模型进行训练;以及使经过训练的决策模型根据其输入数据输出关于驾驶行为的决策行为。本发明的自动驾驶决策方法能够适应复杂多变的驾驶环境,从而实现了能够直接应于无人车驾驶的自动驾驶。

一种自动驾驶决策方法及系统.pdf
本发明实施例提供一种自动驾驶决策系统,该自动驾驶决策系统包括:数据采集模块,用于采集车辆驾驶系统的决策模型的输入数据和输出数据;决策模型训练模块,根据所述决策模型的输入数据和输出数据对所述决策模型进行训练;以及决策算法模块,用于使经过训练的决策模型根据其输入数据输出关于驾驶行为的决策行为。本发明的系统能够适应复杂多变的驾驶环境,从而实现了能够直接应于无人车驾驶的自动驾驶。
一种基于知识图谱的自动驾驶决策方法和系统.pdf
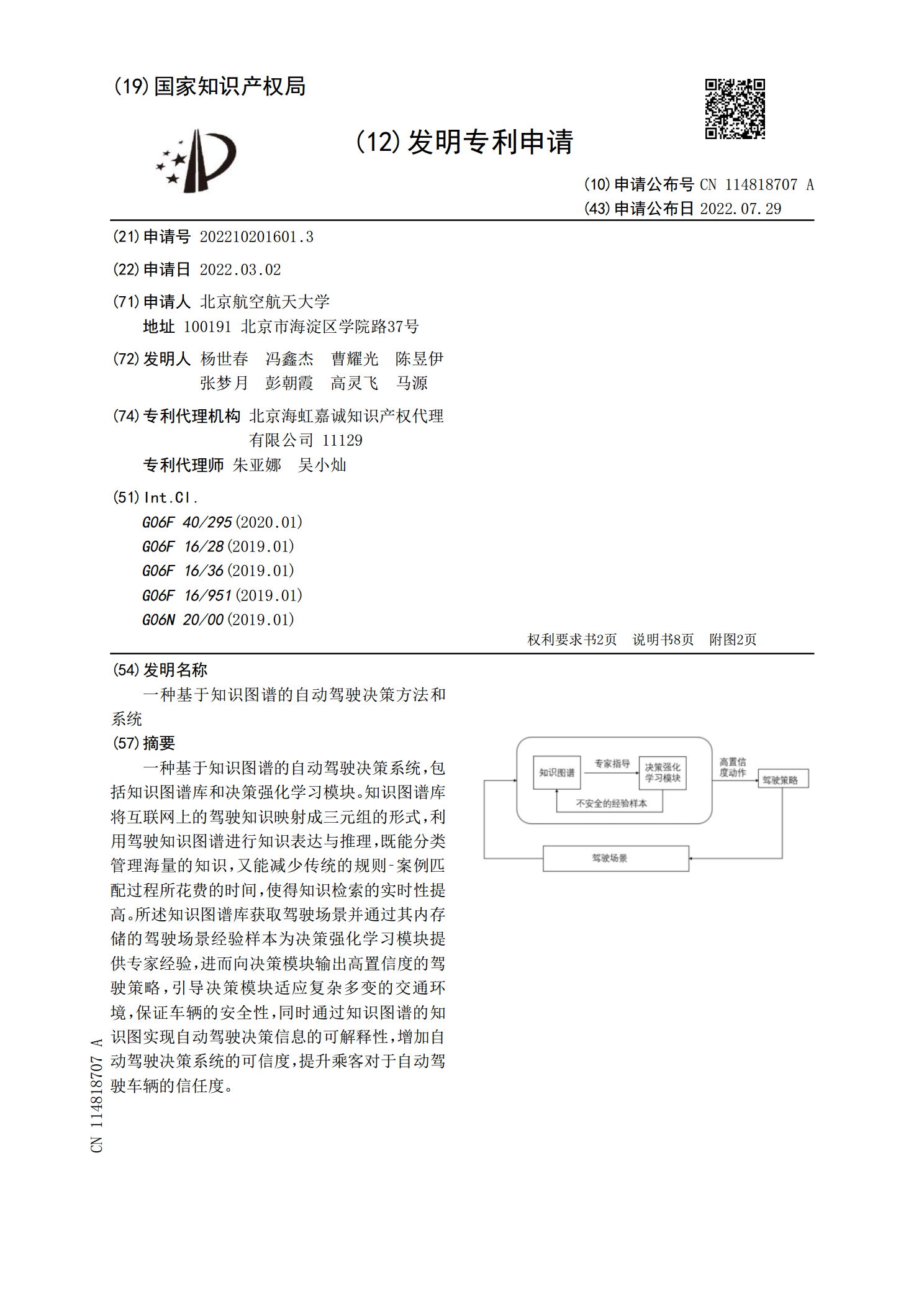
一种基于知识图谱的自动驾驶决策系统,包括知识图谱库和决策强化学习模块。知识图谱库将互联网上的驾驶知识映射成三元组的形式,利用驾驶知识图谱进行知识表达与推理,既能分类管理海量的知识,又能减少传统的规则?案例匹配过程所花费的时间,使得知识检索的实时性提高。所述知识图谱库获取驾驶场景并通过其内存储的驾驶场景经验样本为决策强化学习模块提供专家经验,进而向决策模块输出高置信度的驾驶策略,引导决策模块适应复杂多变的交通环境,保证车辆的安全性,同时通过知识图谱的知识图实现自动驾驶决策信息的可解释性,增加自动驾驶决策系统

一种自动驾驶方法及系统.pdf
本发明提供了一种自动驾驶方法及系统,首先获取机动车车体参数、机动车车速与机动车最佳转向角间的对应关系并存储所述对应关系;当最优机动策略为车道切换、超车和转向行驶机动操作时调整机动车行驶状态至理想状态;之后获取机动车车速和机动车前后轮轴距;将机动车车速与所述对应关系进行比对,获取机动车最佳转向角;根据机动车最佳转向角和机动车前后轮轴距,获取机动车转弯半径;最后根据机动车最佳转向角和机动车转弯半径即可规划出车道切换路径轨迹。因此,本发明提供了一种能够根据最优机动策略准确规划出机动车在自动驾驶状态下的车道切换路

一种自动驾驶系统、装置及方法.pdf
一种自动驾驶系统,该系统通过机器视觉对环境路况场景进行三维重建,从而获得路况三维图像信息,用于驾驶判断和决策。所述机器视觉通过单目相机或摄像机获取环境路况图像。所述的环境路况图像通过输入经过训练的深度学习模型重建所述环境路况的三维图像模型。