
一种自动驾驶系统、装置及方法.pdf

慧娇****文章


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动驾驶系统、装置及方法.pdf
一种自动驾驶系统,该系统通过机器视觉对环境路况场景进行三维重建,从而获得路况三维图像信息,用于驾驶判断和决策。所述机器视觉通过单目相机或摄像机获取环境路况图像。所述的环境路况图像通过输入经过训练的深度学习模型重建所述环境路况的三维图像模型。

一种自动驾驶车辆的控制方法、装置及系统.pdf
本发明提供一种自动驾驶车辆的控制方法、装置及系统,该自动驾驶车辆的控制方法包括:获取表征车辆偏离预设基准线程度的偏离值以及车辆与预设基准线之间的角度数据;判断偏离值是否小于预设阈值;当偏离值小于预设阈值时,根据偏离值和角度数据生成用于调整车辆方向的控制信号。其中,预设基准线指工作人员在路面上画出的与路面颜色区分较为明显的一条直线;角度数据指车辆各轮组与预设基准线之间的角度;通过偏离值与预设阈值的比较,可以判断车辆在驾驶过程中,是否因为偏离预设基准线程度过大而需要调节;当需要调节时,根据偏离值和角度数据生成

一种自动驾驶车辆的远程监控方法、装置和系统.pdf
本发明公开一种自动驾驶车辆的远程监控方法、装置和系统,用于解决现有技术中无法对自动驾驶车辆的运行情况进行及时的监控和维护的问题。该方法包括:自动驾驶车辆中的监控装置对自动驾驶车辆中部件的运行状况进行监测,在监测到部件发生故障的情况下,确定故障状态并生成告警报告,将生成的告警报告发送给中央控制装置;其中,部件包括车载传感器、自动驾驶控制装置和/或车体部件,告警报告中包括故障部件的标识信息、故障状态描述信息;接收来自中央控制装置的控制命令,控制命令中包括控制操作的信息和/或控制数据的信息;根据接收到的控制命令

一种自动驾驶车辆的测试方法、装置、系统及设备.pdf
本申请公开了一种自动驾驶车辆的测试方法、装置、系统及设备,所述的方法包括:基于驾驶模拟器获取目标车辆的第一行驶数据,目标车辆为测试场景的交通流中对待测车辆生成干扰信息的交通参与车辆;控制目标车辆基于第一行驶数据信息对应的驾驶指令行驶;获取目标车辆在行驶过程中的运行姿态;根据目标车辆的运行姿态,确定待测车辆的第二行驶数据;控制待测车辆基于第二行驶数据对应的驾驶指令行驶;获取在行驶过程中待测车辆的运行数据;基于待测车辆的运行数据,对待测车辆对应的自动驾驶控制器进行测试;本申请可以模拟实际道路的工况,使得仿真场
一种主要障碍物检测方法、装置与自动驾驶系统.pdf
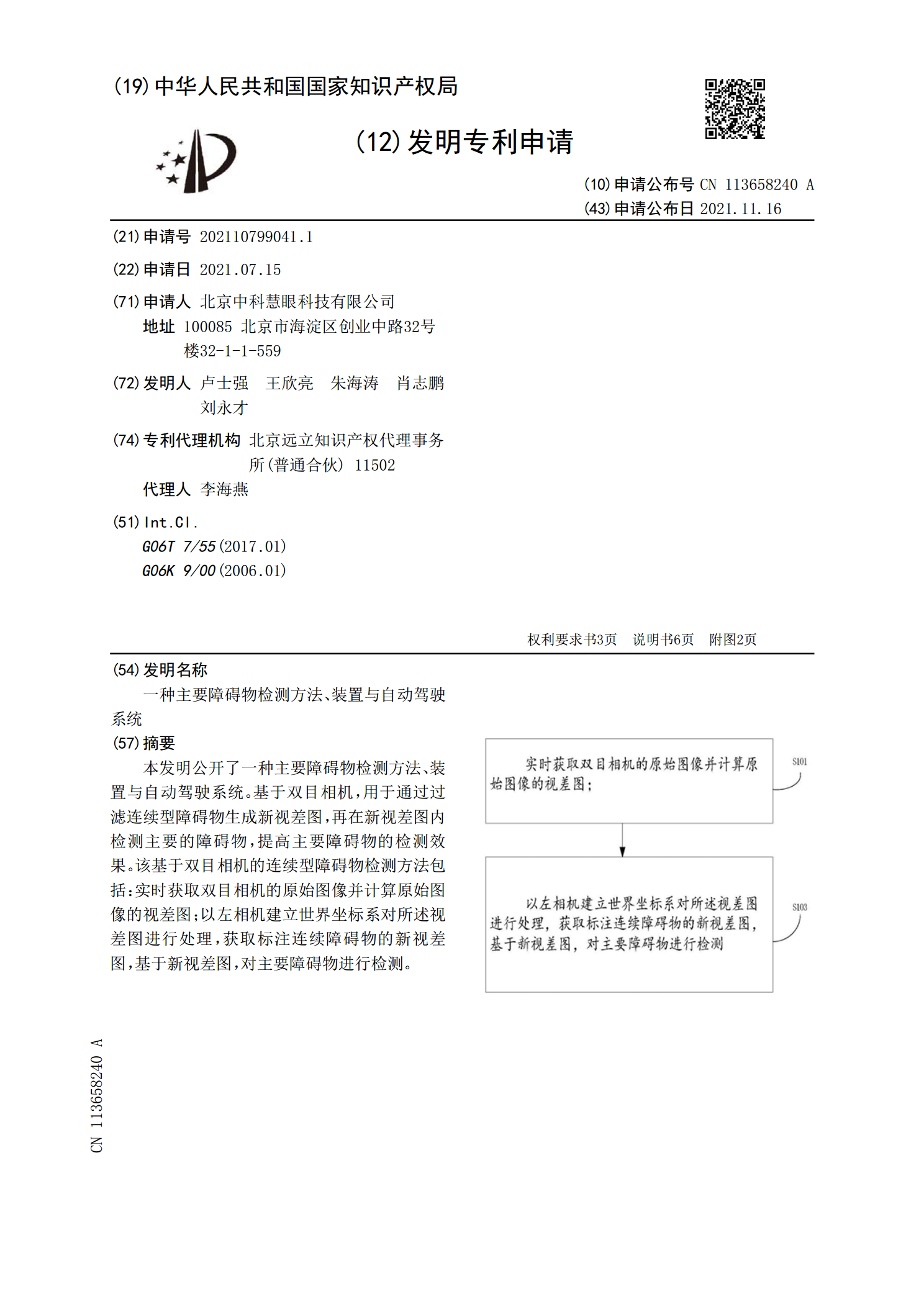
本发明公开了一种主要障碍物检测方法、装置与自动驾驶系统。基于双目相机,用于通过过滤连续型障碍物生成新视差图,再在新视差图内检测主要的障碍物,提高主要障碍物的检测效果。该基于双目相机的连续型障碍物检测方法包括:实时获取双目相机的原始图像并计算原始图像的视差图;以左相机建立世界坐标系对所述视差图进行处理,获取标注连续障碍物的新视差图,基于新视差图,对主要障碍物进行检测。