
一种电动汽车的主动避障系统.pdf

一只****ua


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电动汽车的主动避障系统.pdf
本发明涉及一种电动汽车的主动避障系统,该避障系统在第三监测单元监控到电动汽车的行驶路径存在异物的情况下,中央处理单元读取模型库中的安全模式基于行驶状态参数和路况信息并结合异物的固有参数/运动参数判定异物是否威胁电动汽车的行驶安全;在中央处理单元判定异物威胁电动汽车的行驶安全的情况下,中央处理单元将异物标定为目标障碍物,并且中央处理单元基于电动汽车的固有属性、行驶状态参数、路况信息、固有参数/运动参数进行障碍物对电动汽车的行驶安全性评估并生成安全状态等级,中央处理单元根据安全状态等级生成与安全状态等级相互对

一种四轮轮毂驱动电动汽车的主动避障方法.pdf
本发明公开了一种四轮轮毂驱动电动汽车的主动避障方法,包括以下步骤:预先设定汽车方向盘的扭矩T的正常范围;计算在当前车速下,汽车开始以最大的制动强度对车辆进行减速制动到汽车完全静止时,汽车移动的距离S
一种避障系统及避障方法.pdf
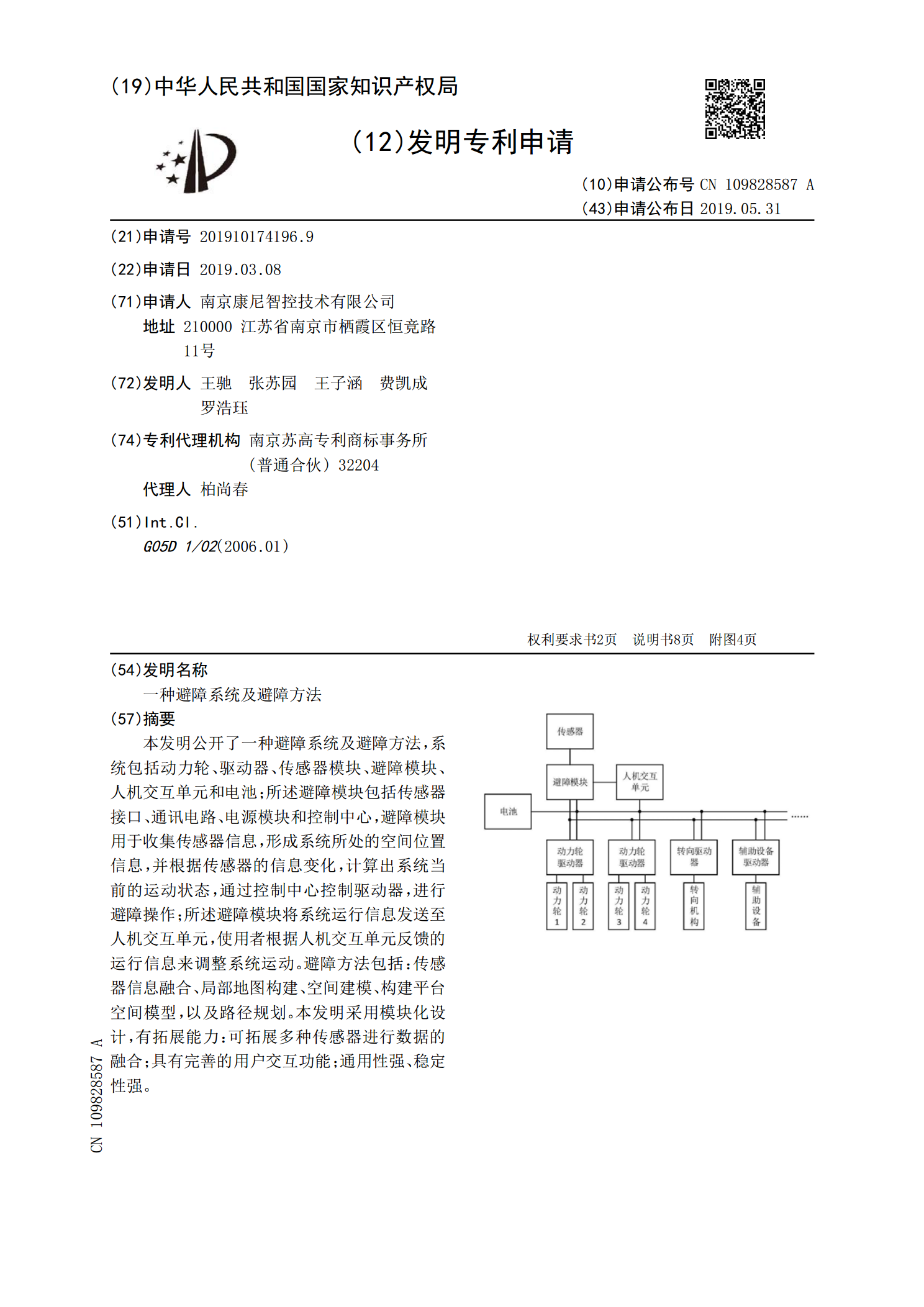
本发明公开了一种避障系统及避障方法,系统包括动力轮、驱动器、传感器模块、避障模块、人机交互单元和电池;所述避障模块包括传感器接口、通讯电路、电源模块和控制中心,避障模块用于收集传感器信息,形成系统所处的空间位置信息,并根据传感器的信息变化,计算出系统当前的运动状态,通过控制中心控制驱动器,进行避障操作;所述避障模块将系统运行信息发送至人机交互单元,使用者根据人机交互单元反馈的运行信息来调整系统运动。避障方法包括:传感器信息融合、局部地图构建、空间建模、构建平台空间模型,以及路径规划。本发明采用模块化设计,
一种AGV小车自动避障方法及避障系统.pdf
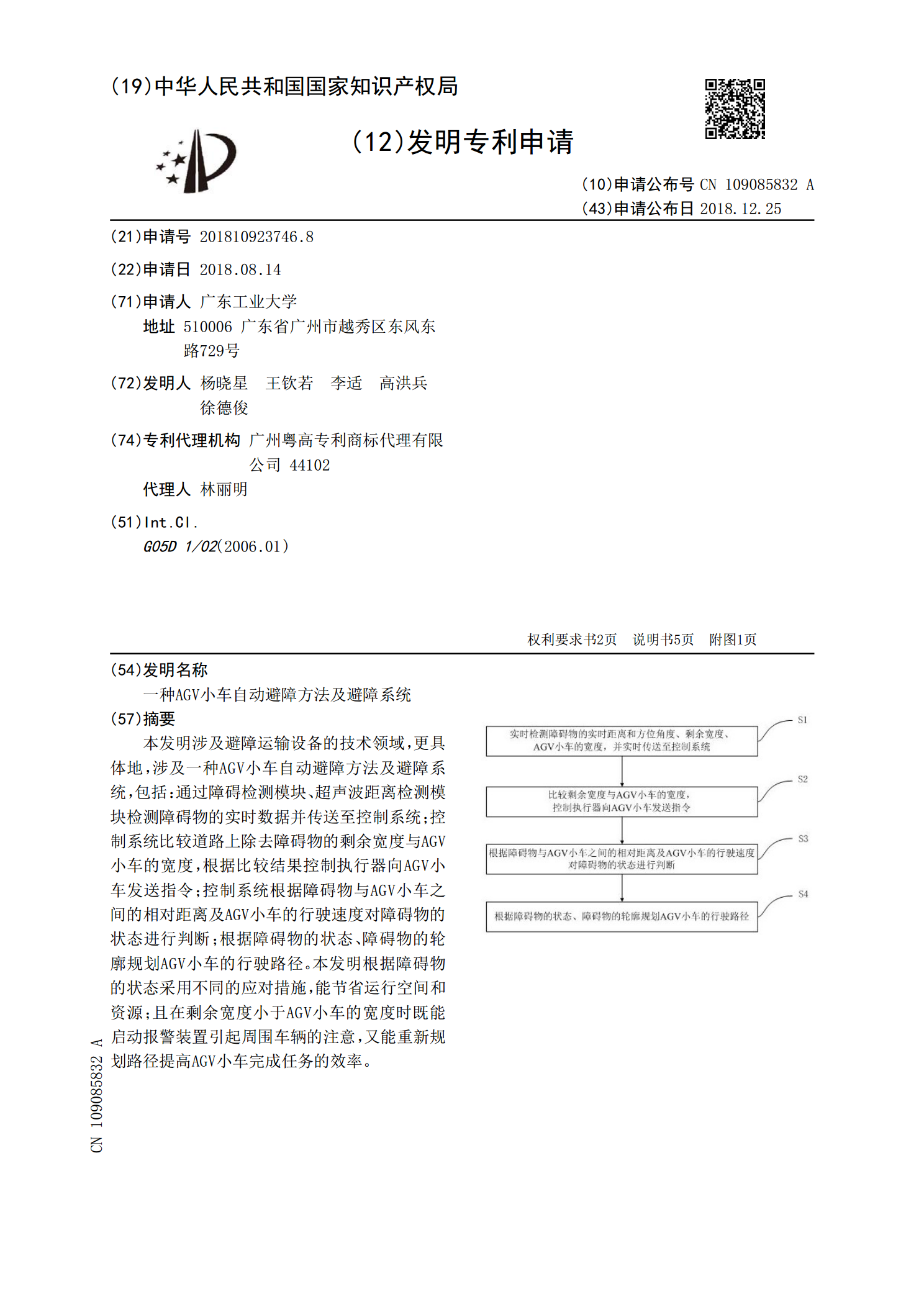
本发明涉及避障运输设备的技术领域,更具体地,涉及一种AGV小车自动避障方法及避障系统,包括:通过障碍检测模块、超声波距离检测模块检测障碍物的实时数据并传送至控制系统;控制系统比较道路上除去障碍物的剩余宽度与AGV小车的宽度,根据比较结果控制执行器向AGV小车发送指令;控制系统根据障碍物与AGV小车之间的相对距离及AGV小车的行驶速度对障碍物的状态进行判断;根据障碍物的状态、障碍物的轮廓规划AGV小车的行驶路径。本发明根据障碍物的状态采用不同的应对措施,能节省运行空间和资源;且在剩余宽度小于AGV小车的宽度
一种无人机避障系统及避障方法.pdf
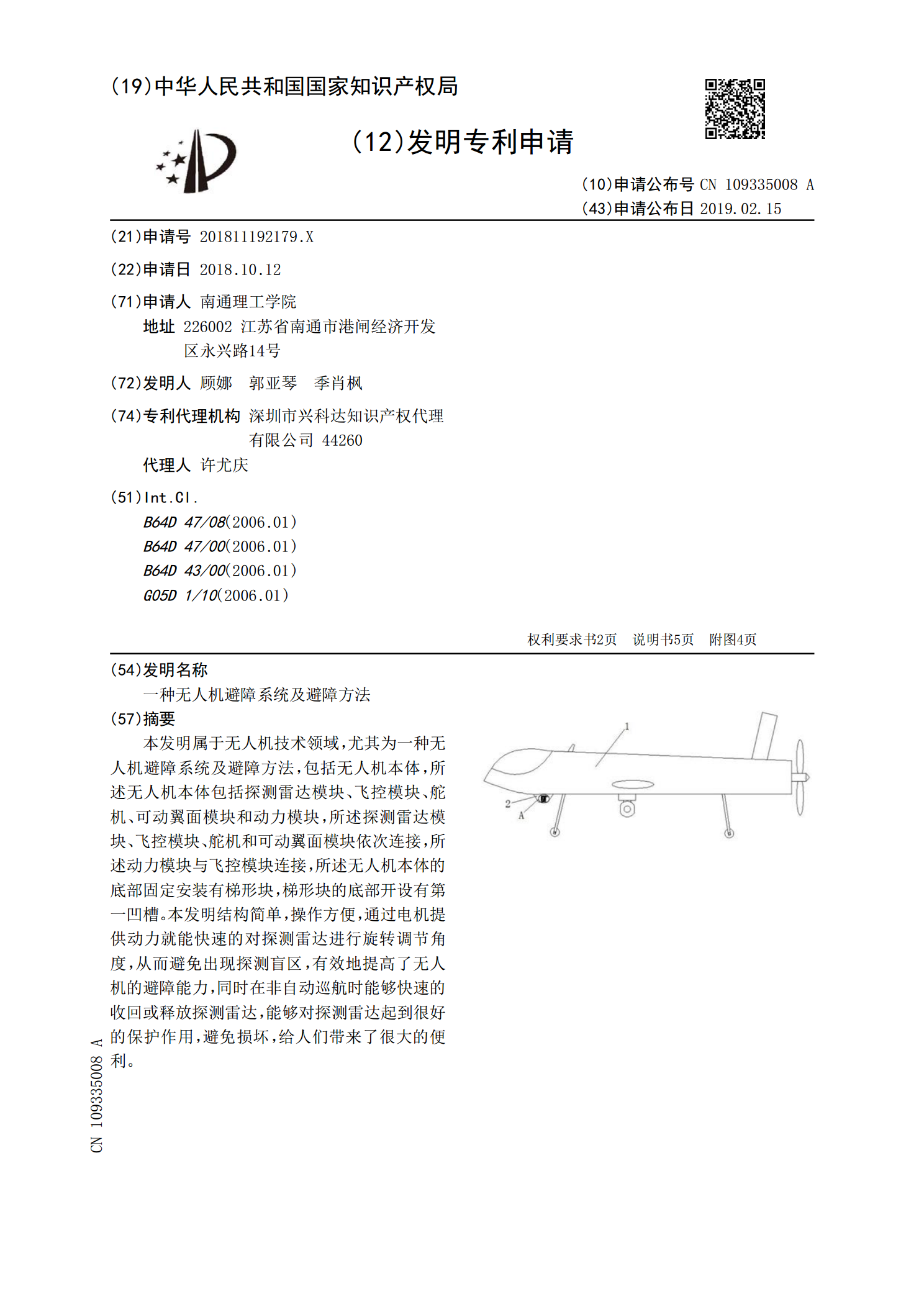
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作