
基于升降平台的姿态检测方法.pdf

丹烟****魔王


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于升降平台的姿态检测方法.pdf
本发明涉及姿态检测技术领域,尤其涉及一种基于升降平台的姿态检测方法。它包括以下步骤:S1、切换到学习模式,用户采用不同的坐站姿势进行坐站;S2、采集深度信息,然后得到人物特征,并且对这些得到的人物特征进行对错标记;S3、形成坐站姿势模型库;S4、切换到监测模式,S5、采集用户姿势的深度信息,得到人物特征,并且将得到的人物特征输入步骤S3得到的姿势模型库中进行分析,判断采集到的用户姿势是正确还是错误;S6、若连续多次判断姿势是错误的,则判断是错误的,进行提醒;若没有连续多次判断姿势是错误的,则返回步骤S5。

基于姿态传感器的检测平台设计.docx
基于姿态传感器的检测平台设计基于姿态传感器的检测平台设计摘要:随着现代科技的快速发展,姿态传感器已经被广泛应用于各个领域。姿态传感器能够准确地感知和测量物体的姿态变化,为实现精确的动作检测提供了有力的工具。本论文介绍了一种基于姿态传感器的检测平台设计,该平台能够实时监测被测对象的姿态变化,并通过数据分析和处理实现相关动作的监测和识别。通过准确的姿态检测和动作监测,可以为许多领域提供精确的姿势控制和动作分析。关键词:姿态传感器、检测平台、数据分析、动作监测一、引言姿态传感器是一种能够感知和测量物体姿态变化的
基于车轮的目标车辆姿态检测方法.pdf
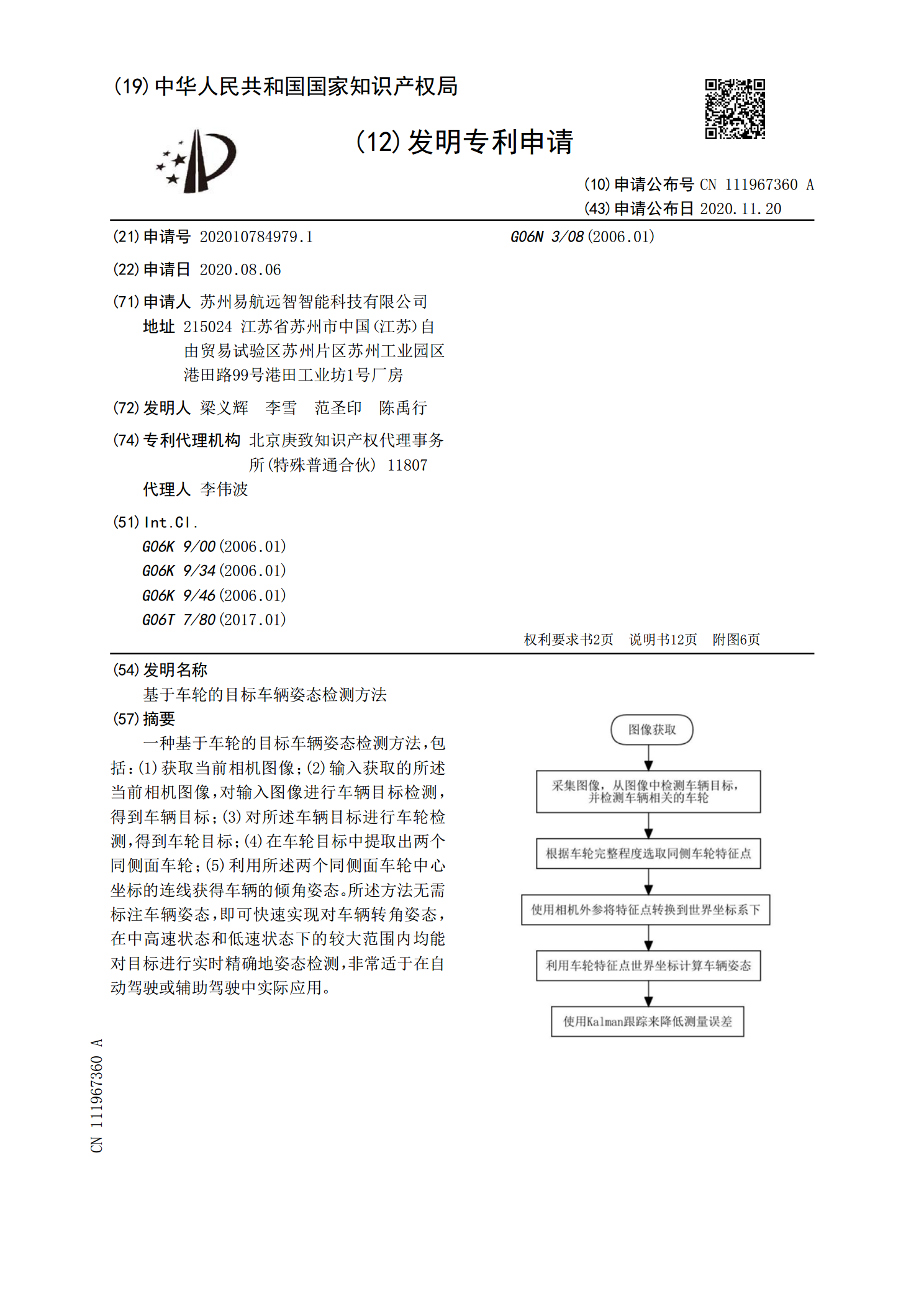
一种基于车轮的目标车辆姿态检测方法,包括:(1)获取当前相机图像;(2)输入获取的所述当前相机图像,对输入图像进行车辆目标检测,得到车辆目标;(3)对所述车辆目标进行车轮检测,得到车轮目标;(4)在车轮目标中提取出两个同侧面车轮;(5)利用所述两个同侧面车轮中心坐标的连线获得车辆的倾角姿态。所述方法无需标注车辆姿态,即可快速实现对车辆转角姿态,在中高速状态和低速状态下的较大范围内均能对目标进行实时精确地姿态检测,非常适于在自动驾驶或辅助驾驶中实际应用。

基于双超平台的姿态测量方法及系统.pdf
本发明提供了一种基于双超平台的姿态测量方法及系统,包括:将运动学特性引入姿态测量模型,利用双超平台进行准静态姿态测量,获取星敏感器的测量数据;基于被测对象的运动学特性,采用平滑滤波方法对星敏感器的测量数据进行动态测量误差修正;结合双超平台的动态特性,对星敏感器的测量数据按泰勒公式展开式求解,反演平滑滤波后姿态变化曲线,并进行分段多项式插值,获取全时空内的高精度测量结果。本发明适用于“高精高稳”的双超平台,不依赖高性能的陀螺,仅靠星敏感器即可实现高精度姿态测量。
基于数学平台的摆式列车姿态参数计算方法.pdf
第卷第期交通运输工程学报