
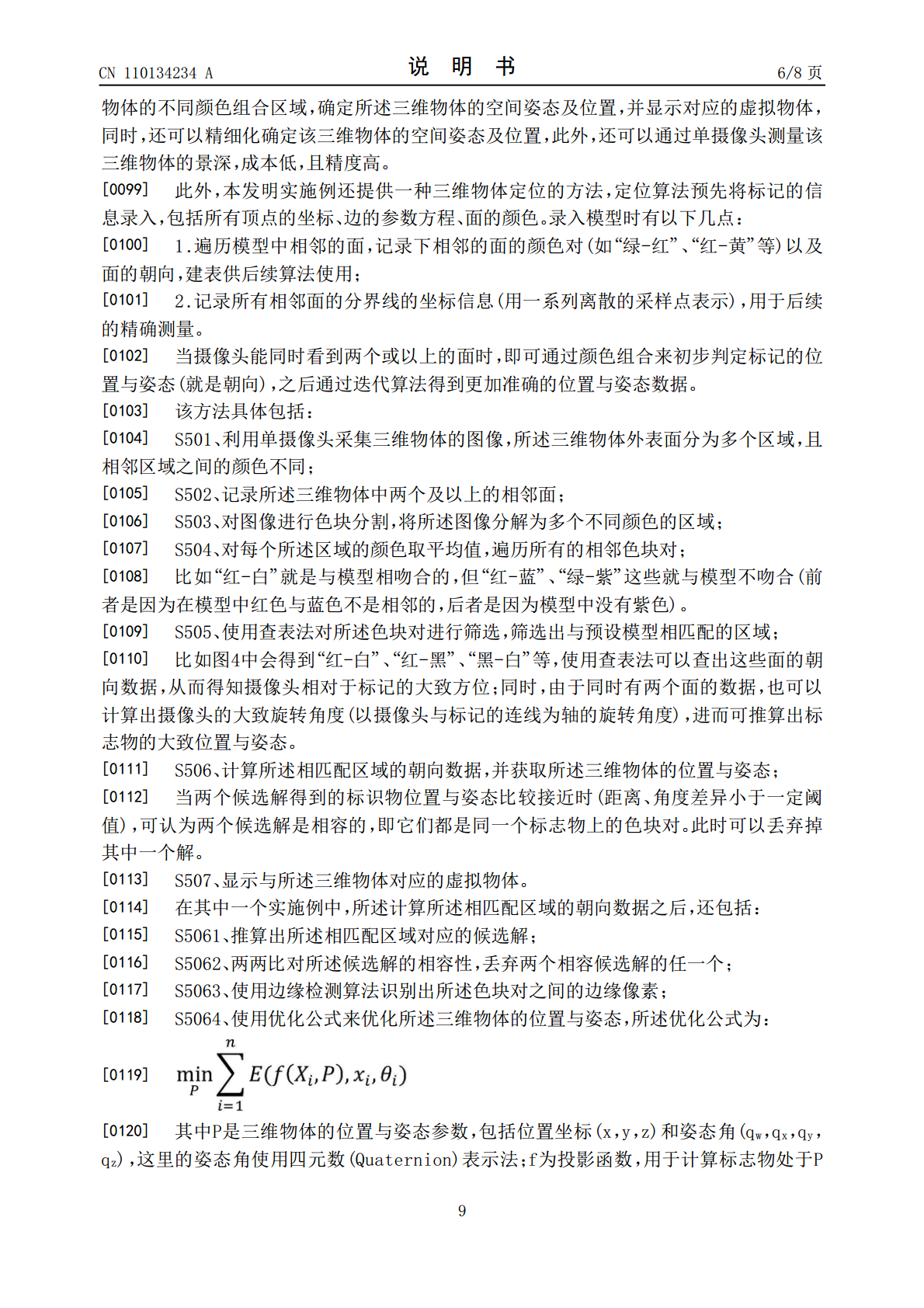
一种三维物体定位的方法及装置.pdf

fu****级甜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三维物体定位的方法及装置.pdf
本发明公开了一种三维物体定位的方法,包括:利用单摄像头采集三维物体的图像,识别出所述三维物体的姿态及位置,所述三维物体外表面分为多个区域,且相邻区域之间的颜色不同;显示与所述三维物体对应的虚拟物体;检测到所述三维物体在三维空间中的姿态和/或位置发生改变后,根据所述姿态和/或位置的变化量,对所述虚拟物体进行调节。相应地,本发明实施例提供了一种三维物体定位的装置,解决了现有技术中无法采用单摄像头场景下根据三维物体的动态改变而自适应调整虚拟物体的变化的问题。
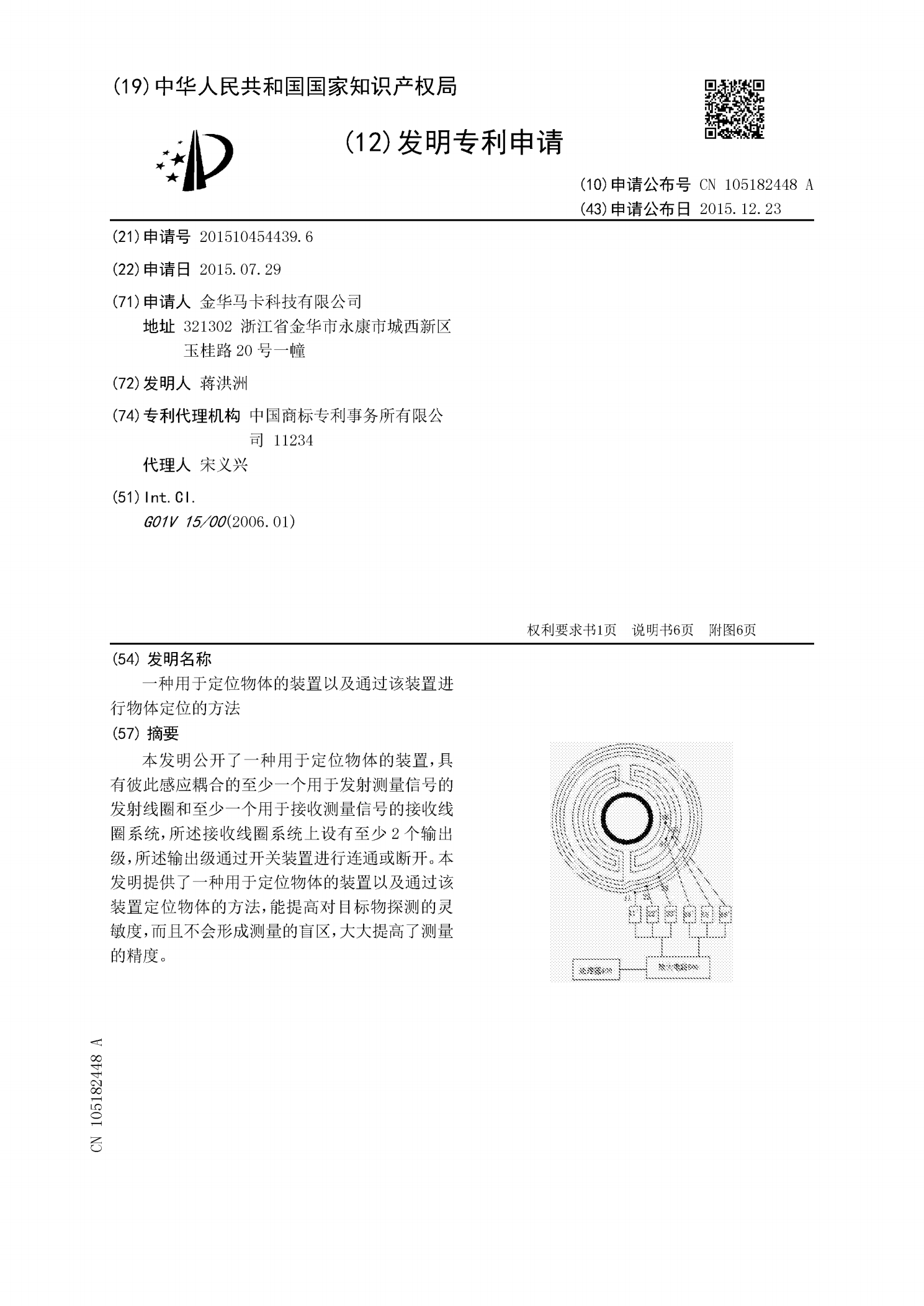
一种用于定位物体的装置以及通过该装置进行物体定位的方法.pdf
本发明公开了一种用于定位物体的装置,具有彼此感应耦合的至少一个用于发射测量信号的发射线圈和至少一个用于接收测量信号的接收线圈系统,所述接收线圈系统上设有至少2个输出级,所述输出级通过开关装置进行连通或断开。本发明提供了一种用于定位物体的装置以及通过该装置定位物体的方法,能提高对目标物探测的灵敏度,而且不会形成测量的盲区,大大提高了测量的精度。

一种用于三维物体定位的视觉方法.docx
一种用于三维物体定位的视觉方法标题:基于深度学习的三维物体定位视觉方法摘要:三维物体定位是计算机视觉领域中一个重要的任务,它能够为机器人导航、增强现实和自动驾驶等应用提供精确的环境感知。随着深度学习的快速发展,越来越多的研究开始利用深度学习方法来解决三维物体定位问题。本文基于深度学习的三维物体定位视觉方法进行了综述,总结了目前常见的方法和技术,并对未来的发展进行了展望。1.引言三维物体定位是计算机视觉中一个重要的问题,它的目标是通过分析图像数据,确定物体在三维空间中的位置和姿态。在过去的几十年里,已经有许
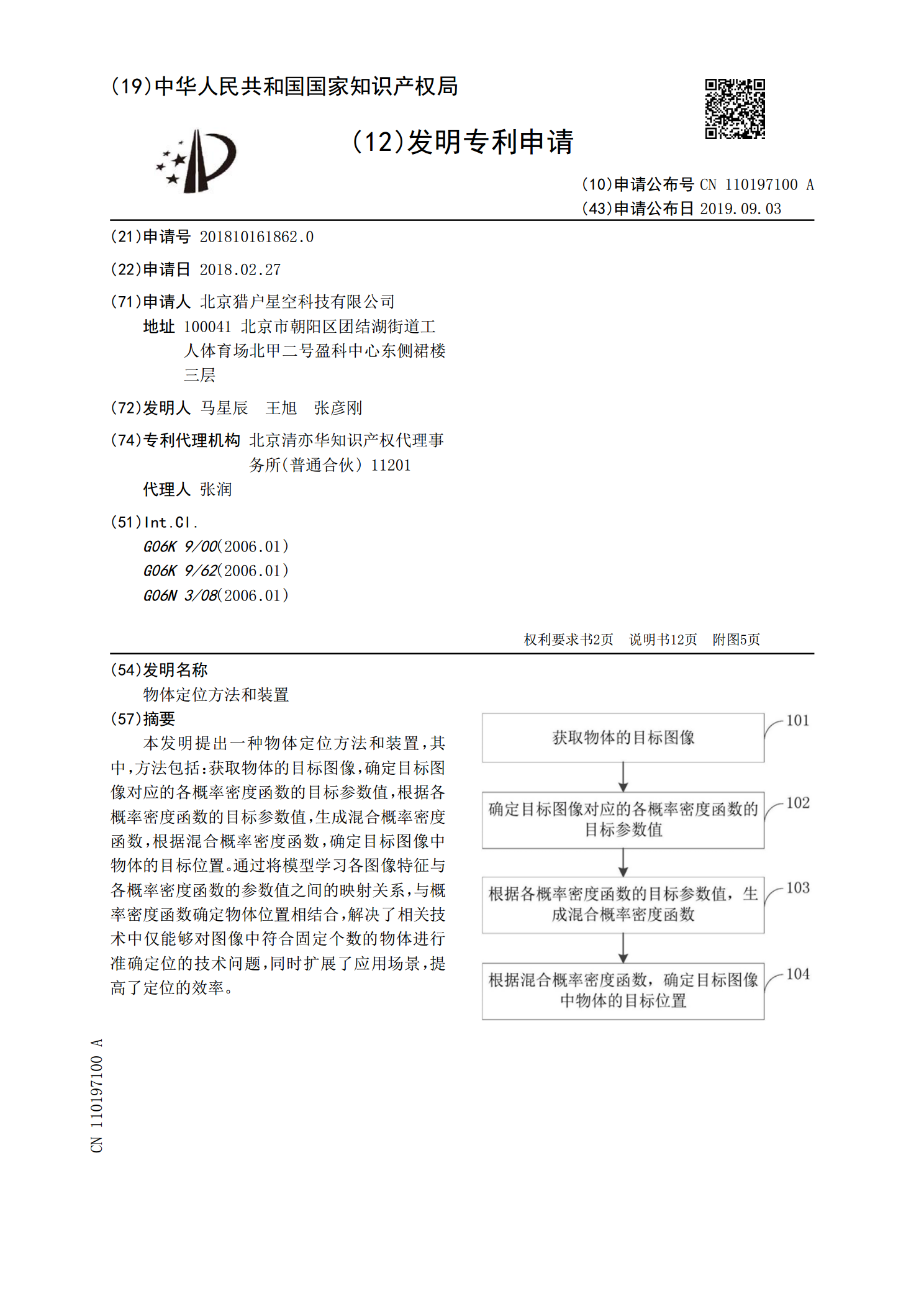
物体定位方法和装置.pdf
本发明提出一种物体定位方法和装置,其中,方法包括:获取物体的目标图像,确定目标图像对应的各概率密度函数的目标参数值,根据各概率密度函数的目标参数值,生成混合概率密度函数,根据混合概率密度函数,确定目标图像中物体的目标位置。通过将模型学习各图像特征与各概率密度函数的参数值之间的映射关系,与概率密度函数确定物体位置相结合,解决了相关技术中仅能够对图像中符合固定个数的物体进行准确定位的技术问题,同时扩展了应用场景,提高了定位的效率。
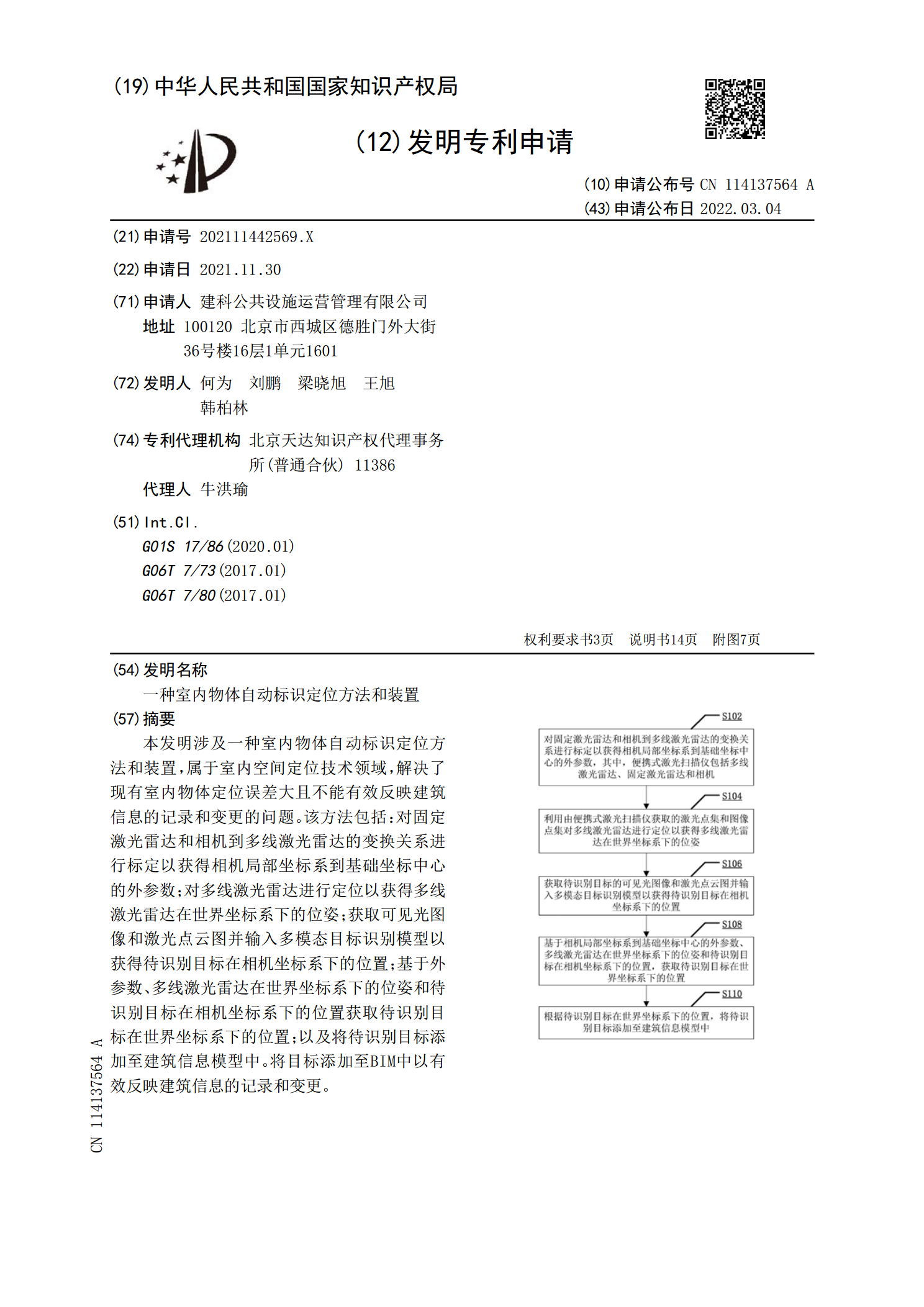
一种室内物体自动标识定位方法和装置.pdf
本发明涉及一种室内物体自动标识定位方法和装置,属于室内空间定位技术领域,解决了现有室内物体定位误差大且不能有效反映建筑信息的记录和变更的问题。该方法包括:对固定激光雷达和相机到多线激光雷达的变换关系进行标定以获得相机局部坐标系到基础坐标中心的外参数;对多线激光雷达进行定位以获得多线激光雷达在世界坐标系下的位姿;获取可见光图像和激光点云图并输入多模态目标识别模型以获得待识别目标在相机坐标系下的位置;基于外参数、多线激光雷达在世界坐标系下的位姿和待识别目标在相机坐标系下的位置获取待识别目标在世界坐标系下的位置