
工件的自动拾取方法和装置.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

工件的自动拾取方法和装置.pdf
本发明公开了工件的自动拾取方法和装置,方法包括以下步骤:获取模型文本,其中模型文本包括工件的第一点云;获取工件的第二点云;根据第一点云,得到第一特征点,以及根据第二点云,得到第二特征点;根据第一特征点和第二特征点,通过霍夫投票进行匹配;根据匹配结果,自动进行工件的拾取;其中,匹配结果包括第一点云与第二点云之间的旋转平移矩阵。通过本发明不需要人工对工件进行放置,使得工件在任意状态均可以进行自动拾取,提高了效率且减少了成本。本发明作为一种工件的自动拾取方法和装置,可广泛应用于三维定位技术领域。

夹紧装置与工件轮廓自动匹配的装置和使用该装置的方法.pdf
本发明涉及一种用于将具有包括至少一个支撑件(20)的支撑装置(18)的夹紧装置(12)与工件(16)的工件轮廓(14)自动匹配的装置(10),该装置考虑到在夹紧装置的情况下的简化的轮廓匹配而包括:用于布置夹紧装置(12)的保持件(28);以及装配组件(26),该装配组件具有沿着升程方向(32)可调节的、特别是高度可调节的升程单元(30),用于调整支撑装置(18),其中,这样设计装配组件(26),即,升程单元(30)可根据代表工件(16)的工件轮廓(14)的CAD数据定位。本发明还涉及一种使用用于将具有包括

地震数据速度谱自动拾取方法和装置.pdf
公开了一种地震数据速度谱自动拾取方法和装置。该方法包括以下步骤:对共中心点地震数据的速度谱进行去噪声预处理;基于已预处理的速度谱获得当前时间点附近的最大振幅的位置,作为当前拾取速度点;基于当前拾取速度点对速度谱进行去噪声处理;基于已去噪声处理的速度谱获得下一时间点附近的最大振幅的位置,作为下一个拾取速度点;以及判断是否获得所需个数的拾取速度点,如果未获得,则将下一个拾取速度点作为当前拾取速度点,返回执行上述基于当前拾取速度点对速度谱进行去噪声处理的步骤,如果已获得,则输出所有拾取速度点,其中,仅保留速度值
用于自动连接两个工件的装置和方法.pdf
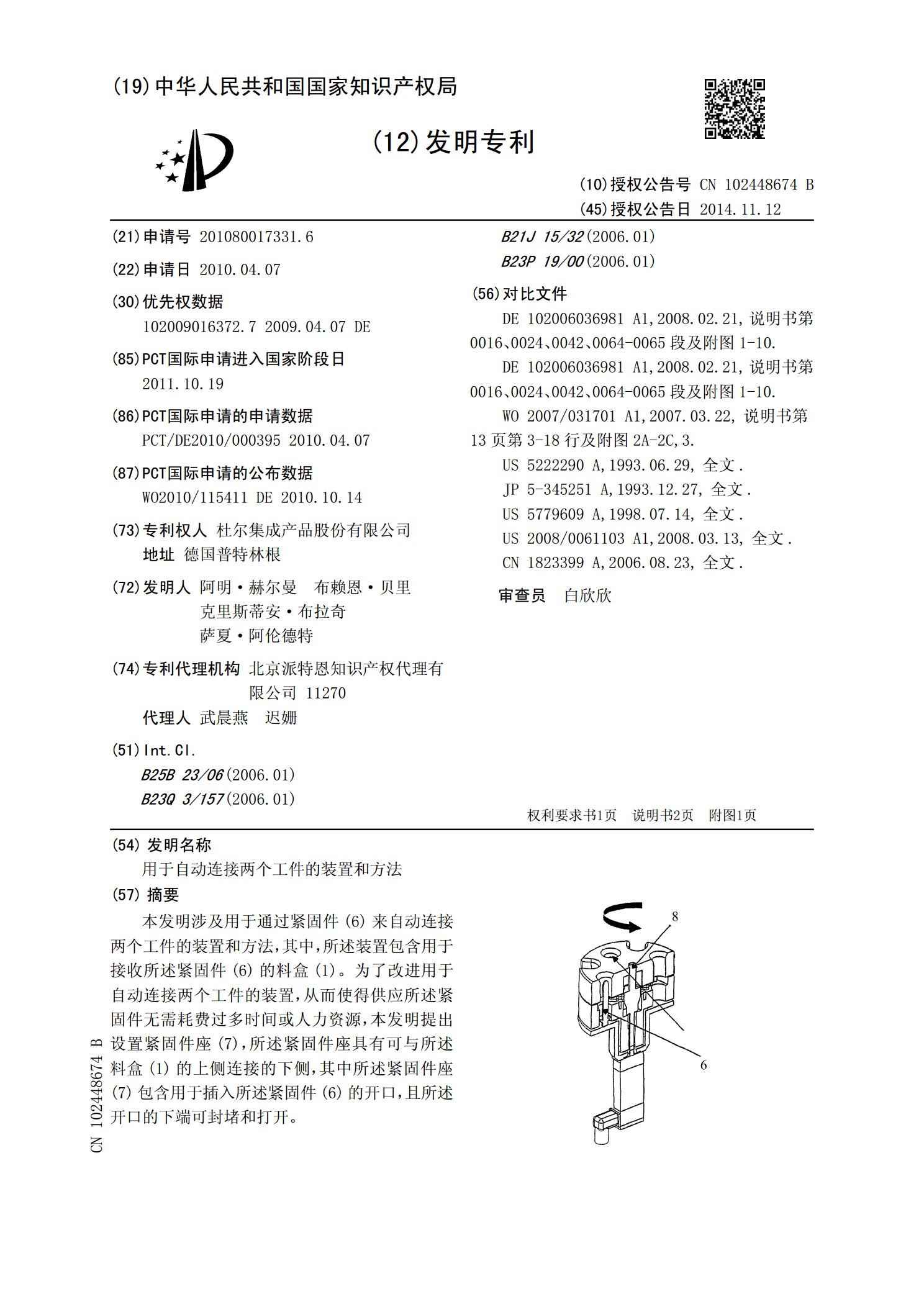
本发明涉及用于通过紧固件(6)来自动连接两个工件的装置和方法,其中,所述装置包含用于接收所述紧固件(6)的料盒(1)。为了改进用于自动连接两个工件的装置,从而使得供应所述紧固件无需耗费过多时间或人力资源,本发明提出设置紧固件座(7),所述紧固件座具有可与所述料盒(1)的上侧连接的下侧,其中所述紧固件座(7)包含用于插入所述紧固件(6)的开口,且所述开口的下端可封堵和打开。

工件自动夹紧的方法及其装置.pdf
本发明公开了一种工件自动夹紧的方法及其装置,利用两套伺服系统来夹紧工件,固定卡孔为非圆孔,锁紧螺母的外轮廓形状、尺寸与固定卡孔的形状、尺寸相一致,保证它们能互相配合;一套伺服系统驱动夹头进入(或离开)固定卡孔,使锁紧螺母与卡孔能进行配合或分离;另一套伺服系统用于调整锁紧螺母相位和在锁紧螺母与卡孔相配合时驱动主轴做回转运动,达到夹紧工件的目的。本发明可精确控制夹紧力矩、力矩可调、装夹位可记忆且能快速夹紧。