
一种可拆卸多用途车.pdf

增梅****主啊


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可拆卸多用途车.pdf
本申请涉及一种可拆卸多用途车,包括车架、前驱动机构、后驱动机构、传动机构、转向机构,所述前驱动机构、后驱动机构分别可拆卸设置于所述车架的前后两端;所述传动机构一端设置在所述车架前端且与所述前驱动机构相邻设置,所述传动机构自由端与所述后驱动机构进行连接;所述转向机构设置在所述前驱动机构上端或传动机构上端。其有益效果在于:本申请可通过拆卸组合形成不同形态,使平衡车具有多种状态和驱动模式,极大的提高了平衡车的利用价值,同时,可兼顾各年龄段的使用需求和娱乐需求,提高了车辆的适用性。
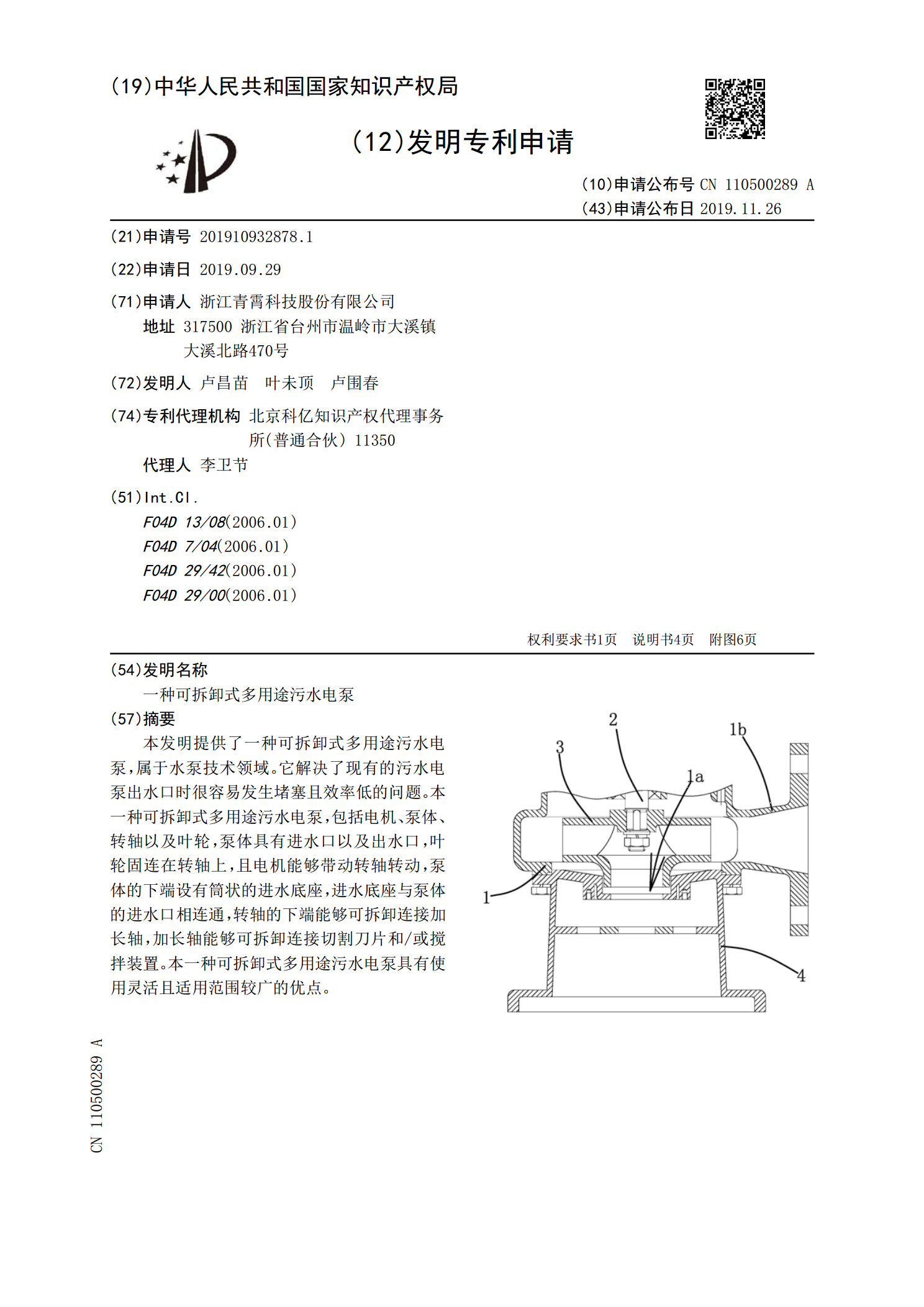
一种可拆卸式多用途污水电泵.pdf
本发明提供了一种可拆卸式多用途污水电泵,属于水泵技术领域。它解决了现有的污水电泵出水口时很容易发生堵塞且效率低的问题。本一种可拆卸式多用途污水电泵,包括电机、泵体、转轴以及叶轮,泵体具有进水口以及出水口,叶轮固连在转轴上,且电机能够带动转轴转动,泵体的下端设有筒状的进水底座,进水底座与泵体的进水口相连通,转轴的下端能够可拆卸连接加长轴,加长轴能够可拆卸连接切割刀片和/或搅拌装置。本一种可拆卸式多用途污水电泵具有使用灵活且适用范围较广的优点。

一种可拆卸疫苗车.pdf
本发明公开了一种可拆卸疫苗车,它包括车板(1)、车脚(2)和多个车架(3),车架(3)包括车架顶杆(3.1)和车架侧杆(3.2),车架顶杆(3.1)的一侧设有卡槽(3.5),车架侧杆(3.2)的一端分别固定在车架顶杆(3.1)的两端且其上下两端分别安装有固定扣(5)。车板(1)的四侧分别通过卡槽(3.5)固定在车架(3)上,车脚(2)上设有与车架侧杆(3.2)上固定扣(5)位置相匹配的固定扣(5),车脚(2)底端设有滚轮(4),车脚(2)和车架(3)通过固定扣(5)安装。本发明可自由拆卸,占用空间小,便于
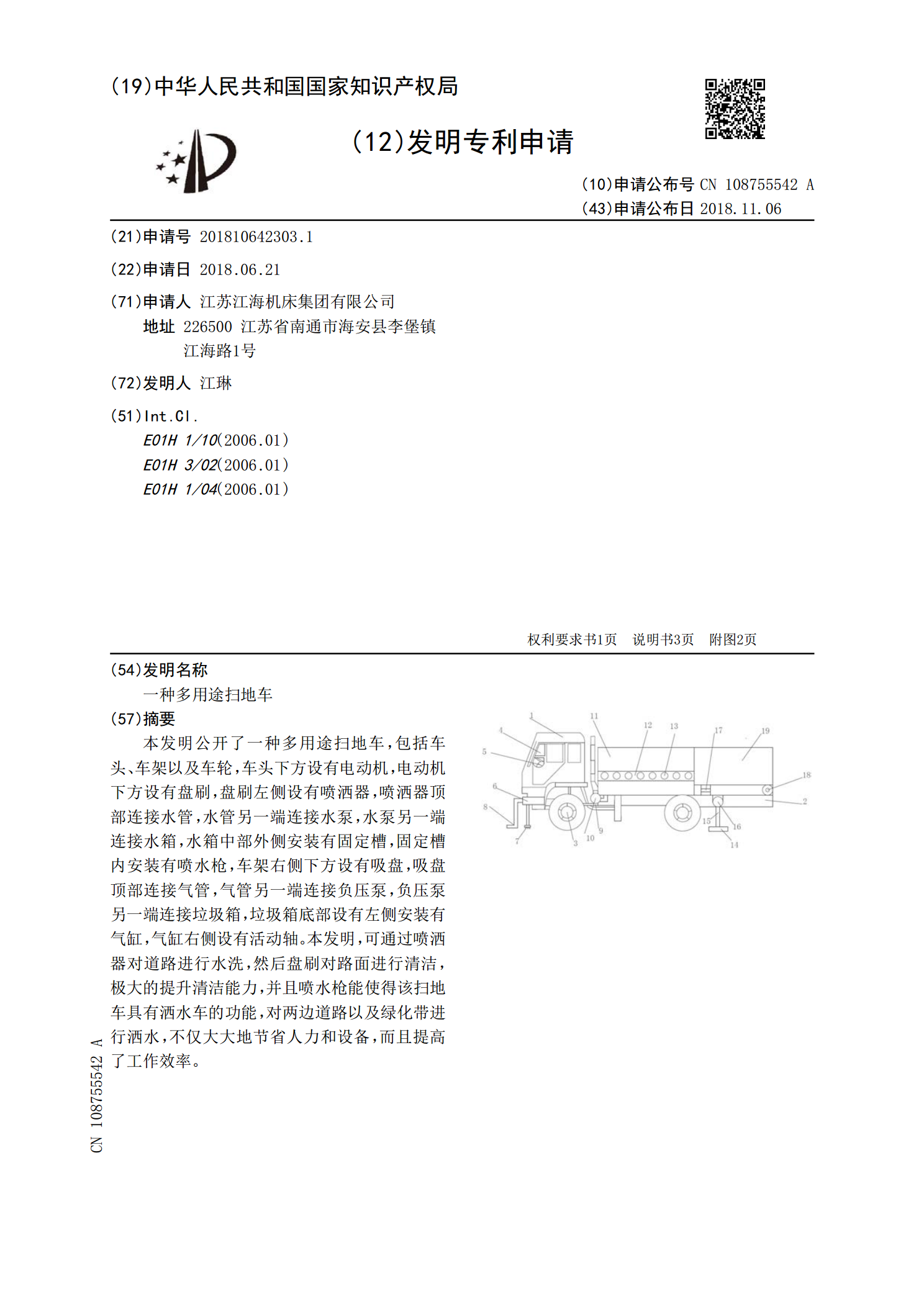
一种多用途扫地车.pdf
本发明公开了一种多用途扫地车,包括车头、车架以及车轮,车头下方设有电动机,电动机下方设有盘刷,盘刷左侧设有喷洒器,喷洒器顶部连接水管,水管另一端连接水泵,水泵另一端连接水箱,水箱中部外侧安装有固定槽,固定槽内安装有喷水枪,车架右侧下方设有吸盘,吸盘顶部连接气管,气管另一端连接负压泵,负压泵另一端连接垃圾箱,垃圾箱底部设有左侧安装有气缸,气缸右侧设有活动轴。本发明,可通过喷洒器对道路进行水洗,然后盘刷对路面进行清洁,极大的提升清洁能力,并且喷水枪能使得该扫地车具有洒水车的功能,对两边道路以及绿化带进行洒水,
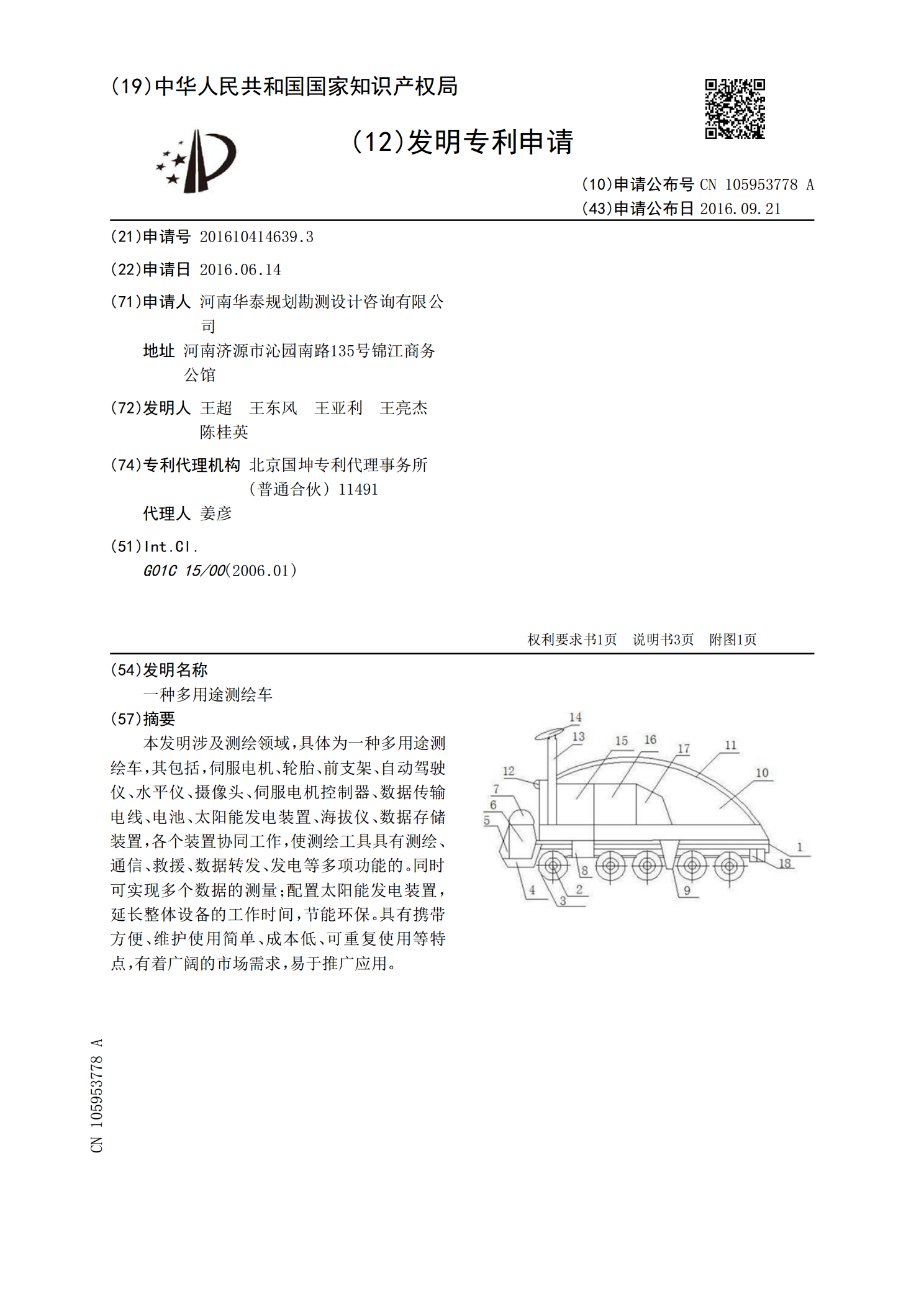
一种多用途测绘车.pdf
本发明涉及测绘领域,具体为一种多用途测绘车,其包括,伺服电机、轮胎、前支架、自动驾驶仪、水平仪、摄像头、伺服电机控制器、数据传输电线、电池、太阳能发电装置、海拔仪、数据存储装置,各个装置协同工作,使测绘工具具有测绘、通信、救援、数据转发、发电等多项功能的。同时可实现多个数据的测量;配置太阳能发电装置,延长整体设备的工作时间,节能环保。具有携带方便、维护使用简单、成本低、可重复使用等特点,有着广阔的市场需求,易于推广应用。