
一种基于目标事件的任务协作方法及其系统.pdf

雨巷****怡轩


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于目标事件的任务协作方法及其系统.pdf
一种基于目标事件的任务协作方法及其系统,其中方法包括:第一终端获取用户输入的目标事件并将其上传至服务器,目标事件包括第一事件内容及第一事件目的地;服务器根据目标事件获取第一终端的定位数据,并向以该定位数据为中心呈圆形向四周扩散一预设半径范围内的至少一第二终端发送携带有该目标事件的协作询问信息;第二终端获取用户输入的协作事件并将其上传至服务器,协作事件包括第二事件内容及第二事件目的地;服务器对目标事件与协作事件的关联性是否符合任务协作规则进行判断,在判断出符合任务协作规则时,将协作事件发送给第一终端。从而给

一种基于事件消息机制的软件系统协作装置及方法.pdf
本发明公开了一种基于事件消息机制的软件系统协作装置及方法,包括事件消息生产客户端,获取业务完成的事件消息,并将该事件消息发送给事件消息中间件;事件消息中间件,获取来自事件消息生产客户端的事件消息,并将该事件消息发送给事件消息消费客户端;事件消息消费客户端,获取来自事件消息中间件的事件消息,依据事件消息的指令,完成相应的业务处理。该一种基于事件消息机制的软件系统协作装置及方法与现有技术相比,快速响应大大提高了用户体验,为留住用户做出了巨大贡献;无限的扩展性,为企业的快速发展奠定了坚实的基础,实用性强,适用范
一种基于无人机协作的智能道路划线系统及其方法.pdf
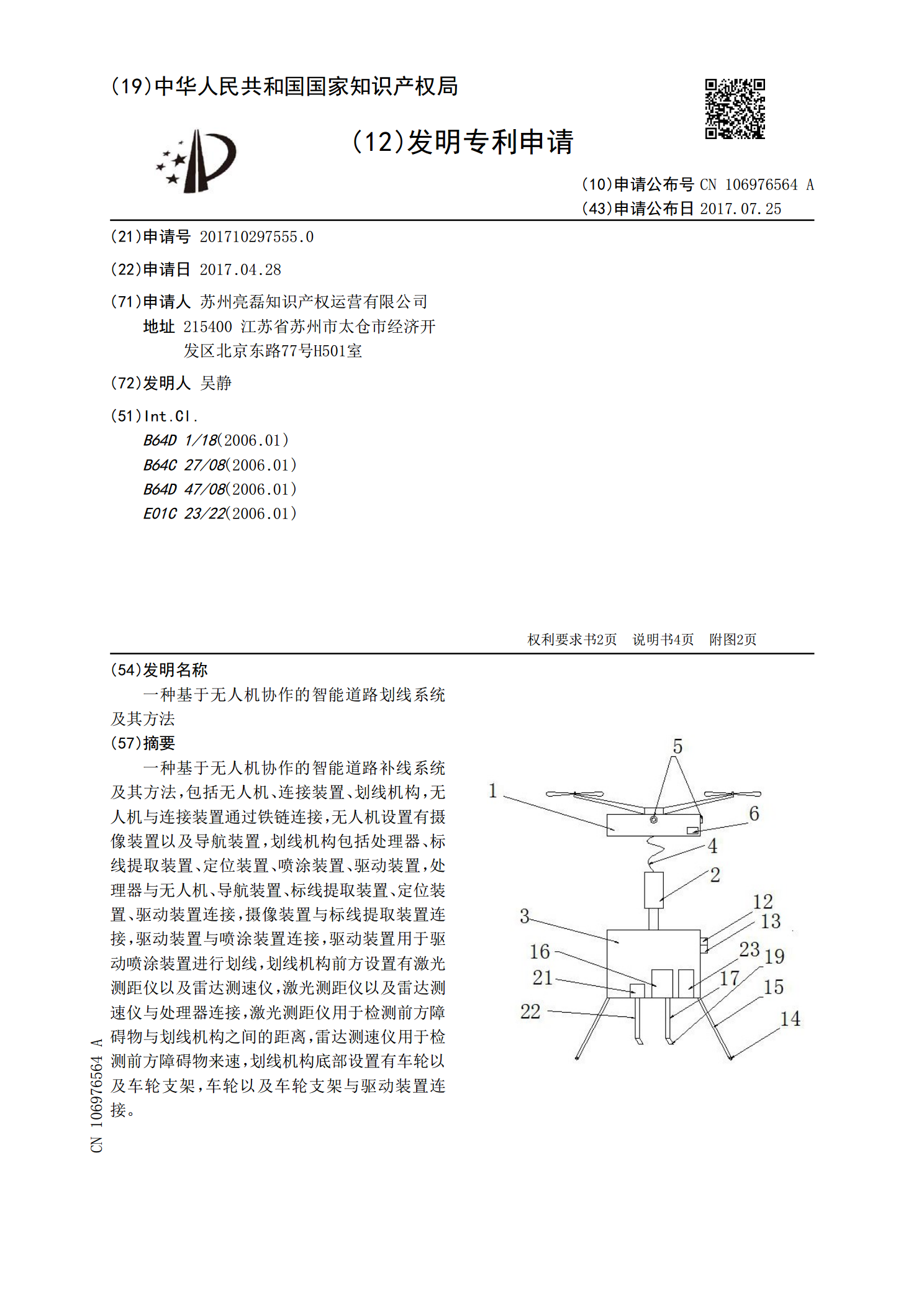
一种基于无人机协作的智能道路补线系统及其方法,包括无人机、连接装置、划线机构,无人机与连接装置通过铁链连接,无人机设置有摄像装置以及导航装置,划线机构包括处理器、标线提取装置、定位装置、喷涂装置、驱动装置,处理器与无人机、导航装置、标线提取装置、定位装置、驱动装置连接,摄像装置与标线提取装置连接,驱动装置与喷涂装置连接,驱动装置用于驱动喷涂装置进行划线,划线机构前方设置有激光测距仪以及雷达测速仪,激光测距仪以及雷达测速仪与处理器连接,激光测距仪用于检测前方障碍物与划线机构之间的距离,雷达测速仪用于检测前方

一种基于多任务融合的三维目标检测系统及其方法.pdf
本发明涉及一种基于多任务融合的三维目标检测系统及其方法,该检测系统包括RGB相机、激光雷达和融合算法感知模块,该检测方法包括:通过RGB相机采集车辆前方交通场景图像,通过激光雷达采集车辆周围三维点云数据;车辆前方交通场景图像传输给图像处理单元,以对车辆前方交通场景图像进行语义分割,输出对应语义信息给点云处理单元;车辆周围三维点云数据传输给点云处理单元,以对车辆周围三维点云数据添加对应语义信息,并对添加了语义信息的点云数据进行三维目标检测,输出三维目标检测结果。与现有技术相比,本发明能够在复杂的低光照环境下

一种基于事件相机的高速目标追踪的方法及系统.pdf
基于事件相机的高速目标的追踪方法及系统,利用事件相机数据采集模块对高速运动的目标进行图像采集;利用事件数据重建模块将一定数量的事件像素的组合,并将这些组合按照其位置信息进行排列,如果由位置重复的,则用像素极性大的替换像素极性小的,最终组合形成新的事件图像;利用孪生网络模型,用于对目标进行图像特征提取。本发明方法和系统可以对不易处理的事件数据进行重建处理;以及利用目标追踪技术对事件相机捕捉的高速目标进行有效追踪。