
自规划式驱动器、调节方法和伺服驱动系统.pdf

一吃****福乾


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

自规划式驱动器、调节方法和伺服驱动系统.pdf
本发明涉及机器人的技术领域,公开了自规划式驱动器、调节方法和伺服驱动系统,其中自规划式驱动器包括用于与外部多个电机通信的接口,还包括供电模组以及N个依次排列的驱动电路模组;各所述驱动电路模组连接于所述接口,独立实现特定数量电机的驱动控制;所述供电模组连接于各所述驱动电路模组,并设有根据所述电机数量规划供电方案的控制模块和用于控制各所述驱动电路模组供电的开关模块。对于用户而言,也无需研究各种驱动器的性能,只需要根据需要自行购买组合即可,也降低了购买者的学习和采购的成本。

自适应式驱动器、调节方法和伺服驱动系统.pdf
本发明涉及机器人的技术领域,公开了自适应式驱动器、调节方法和伺服驱动系统,包括用于与外部多个电机通信的接口,还包括电源模组和多个驱动电路模组;各所述驱动电路模组连接于所述接口,独立实现特定数量所述电机的驱动控制;所述电源模组连接于各所述驱动电路模组,并设有用于获取所述驱动电路模组工作状态的检测模块和用于调整各所述驱动电路模组供电的控制模块。本发明不仅减少了零件数量,而且降低了购买者的学习和采购成本,用户只需要根据需要自行购买组合即可直接使用。
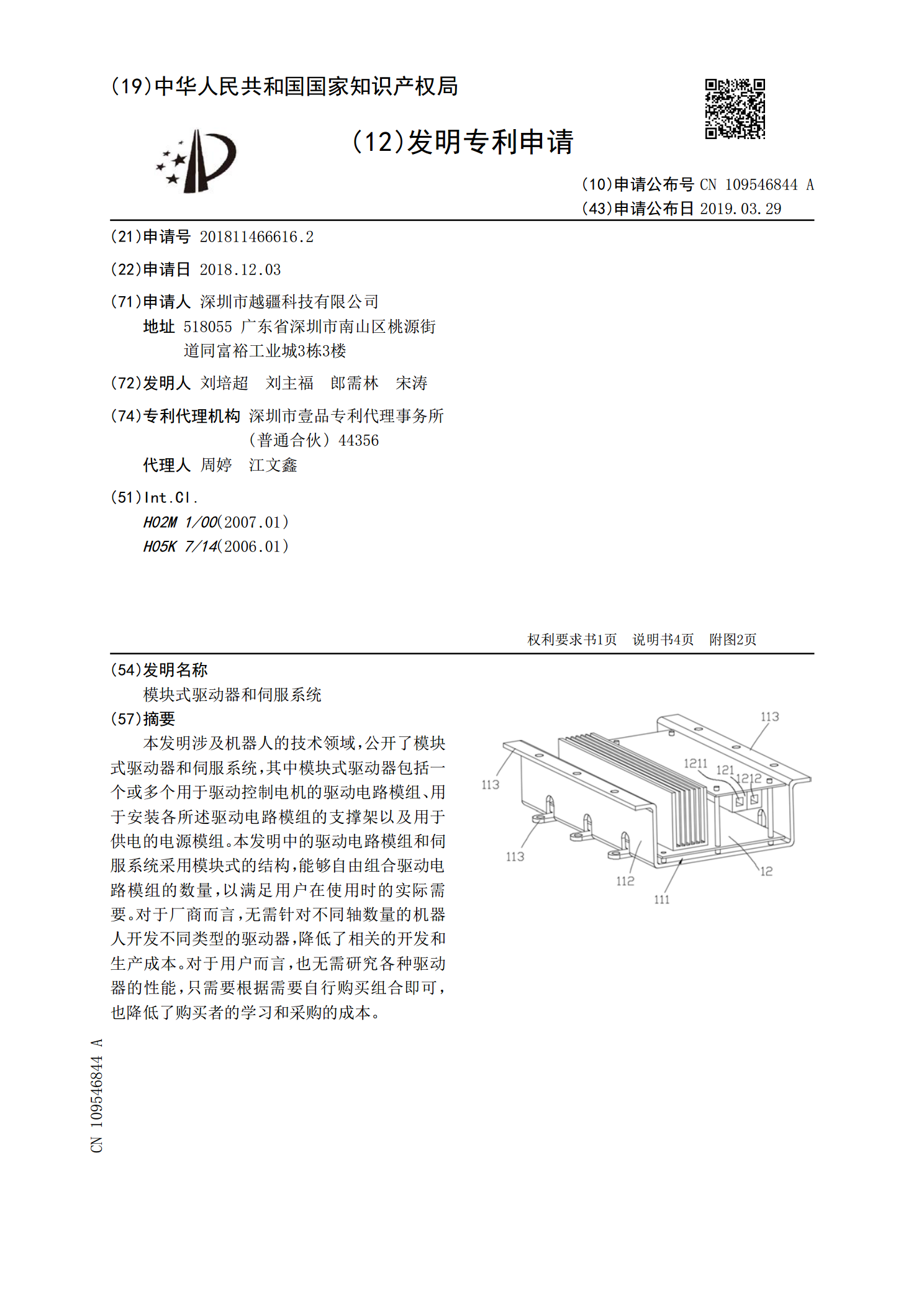
模块式驱动器和伺服系统.pdf
本发明涉及机器人的技术领域,公开了模块式驱动器和伺服系统,其中模块式驱动器包括一个或多个用于驱动控制电机的驱动电路模组、用于安装各所述驱动电路模组的支撑架以及用于供电的电源模组。本发明中的驱动电路模组和伺服系统采用模块式的结构,能够自由组合驱动电路模组的数量,以满足用户在使用时的实际需要。对于厂商而言,无需针对不同轴数量的机器人开发不同类型的驱动器,降低了相关的开发和生产成本。对于用户而言,也无需研究各种驱动器的性能,只需要根据需要自行购买组合即可,也降低了购买者的学习和采购的成本。
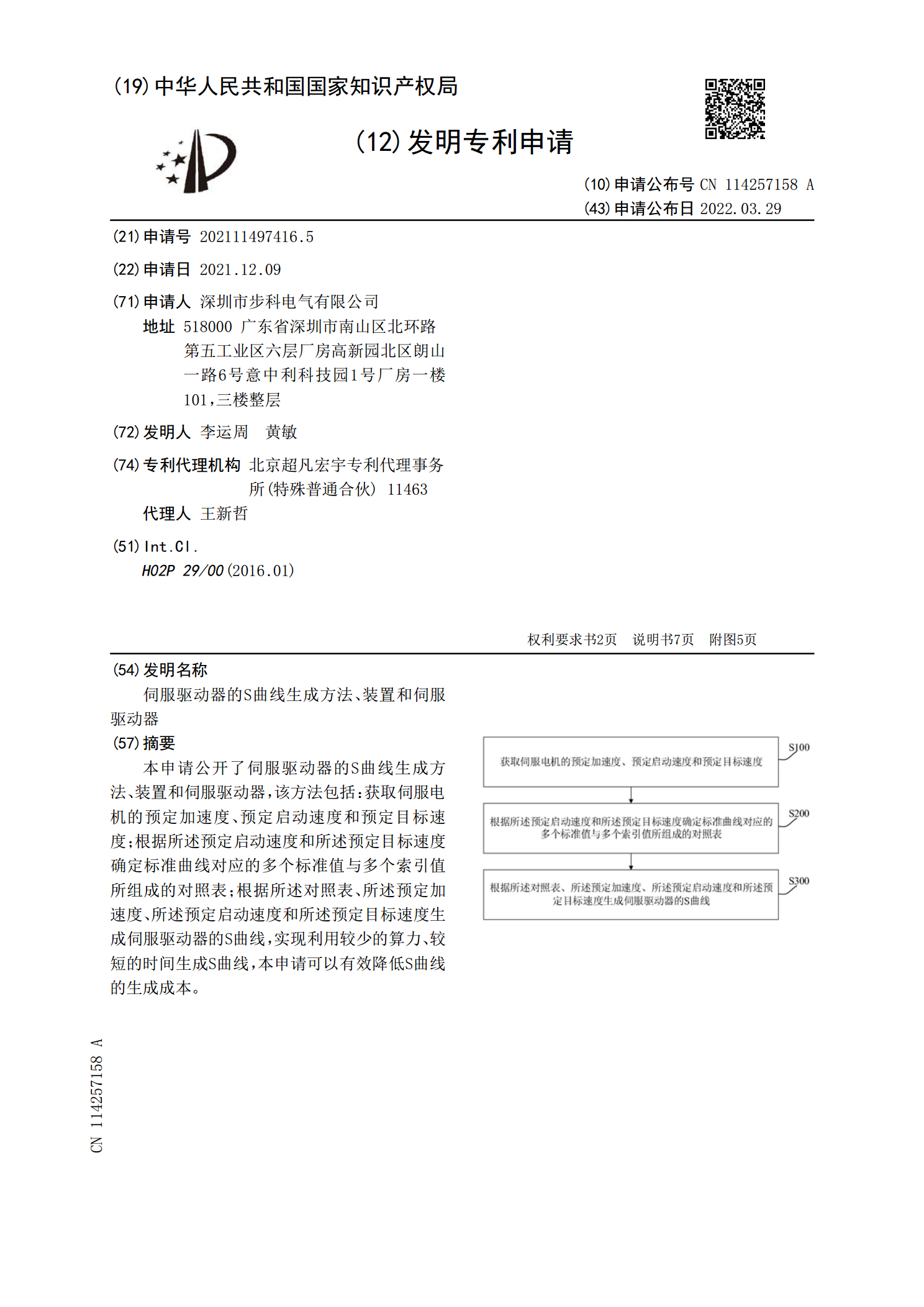
伺服驱动器的S曲线生成方法、装置和伺服驱动器.pdf
本申请公开了伺服驱动器的S曲线生成方法、装置和伺服驱动器,该方法包括:获取伺服电机的预定加速度、预定启动速度和预定目标速度;根据所述预定启动速度和所述预定目标速度确定标准曲线对应的多个标准值与多个索引值所组成的对照表;根据所述对照表、所述预定加速度、所述预定启动速度和所述预定目标速度生成伺服驱动器的S曲线,实现利用较少的算力、较短的时间生成S曲线,本申请可以有效降低S曲线的生成成本。
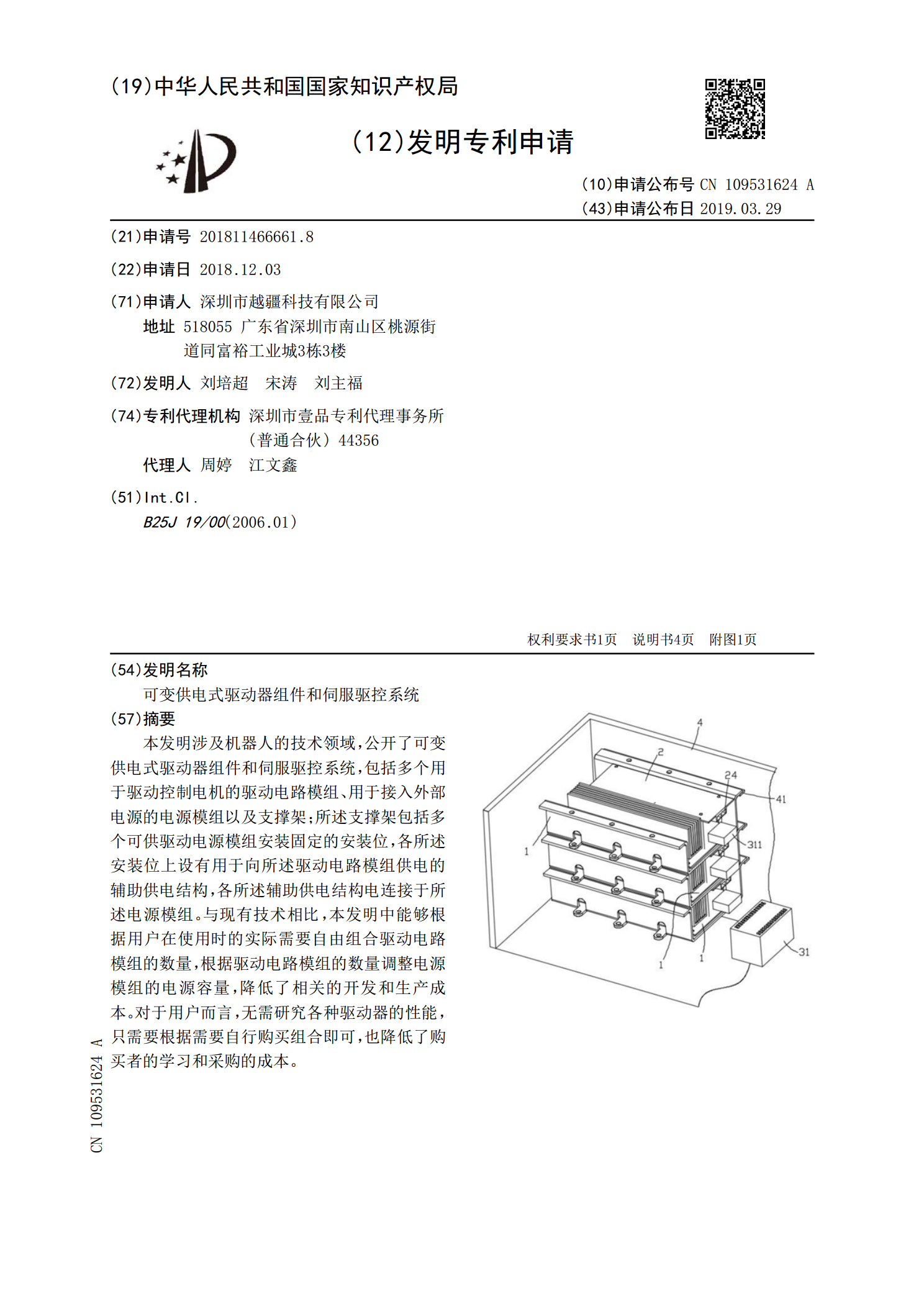
可变供电式驱动器组件和伺服驱控系统.pdf
本发明涉及机器人的技术领域,公开了可变供电式驱动器组件和伺服驱控系统,包括多个用于驱动控制电机的驱动电路模组、用于接入外部电源的电源模组以及支撑架;所述支撑架包括多个可供驱动电源模组安装固定的安装位,各所述安装位上设有用于向所述驱动电路模组供电的辅助供电结构,各所述辅助供电结构电连接于所述电源模组。与现有技术相比,本发明中能够根据用户在使用时的实际需要自由组合驱动电路模组的数量,根据驱动电路模组的数量调整电源模组的电源容量,降低了相关的开发和生产成本。对于用户而言,无需研究各种驱动器的性能,只需要根据需要