
大气湍流折射率结构常数高度分布模式测量装置.pdf

萌运****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

大气湍流折射率结构常数高度分布模式测量装置.pdf
本发明提出大气湍流折射率结构常数高度分布模式测量装置,属于空间激光通信技术领域。该测量装置采用三个浮空系留气球作为通信平台,在不同海拔高度上,利用激光信号通过大气信道传输后的变化来实时测量沿水平路径和斜程路径的大气湍流折射率结构常数的分布模式。本发明装置结构简单,操作方便,便于推广应用。

大气折射率结构常数C_n~2高度分布统计特性分析.docx
大气折射率结构常数C_n~2高度分布统计特性分析摘要:大气折射率结构常数C_n~2是描述大气湍流强度的基本参数之一,研究其高度分布统计特性对于衡量大气湍流的强度和影响,优化光学或雷达传输的有效距离具有重要意义。本文主要介绍了C_n~2的定义和物理意义,然后对其高度分布的统计特性进行了分析,探讨了气象因素和地形条件等因素对C_n~2分布的影响,并结合实测数据对比分析了中低纬度地区和高纬度地区的C_n~2分布差异。最后,对未来C_n~2研究方向进行了展望。关键词:大气折射率结构常数;统计特性;气象因素;高度分

大气折射率高度分布模式及其应用.docx
大气折射率高度分布模式及其应用引言:大气折射率高度分布模式是对大气中折射率随高度变化的描述。大气折射率高度分布模式的研究可以应用于多方面,例如光学通信、天文学、导航等领域。本文将从折射率的定义、高度分布模式的分类及其应用等方面进行探讨。一、折射率的定义折射率是光线传播中的一个重要概念。当光线通过不同介质的时候,由于光速在不同介质中的不同,会出现光线偏折的情况。根据光传播过程中的物理规律可知,折射率n与光在真空中的速度c及在介质中的速度v有关:n=c/v。在气象学中,大气中的折射率是指大气介质导致光线偏折的

基于NOAA模式的典型地区大气湍流高度分布.docx
基于NOAA模式的典型地区大气湍流高度分布Introduction:Atmosphericturbulenceisanimportantfactorthataffectsmanyaspectsofourdailylives,includingtransportation,aviation,andwindenergy.Understandingtheheightdistributionofatmosphericturbulenceindifferentregionsiscrucialforoptimizin
一种大气折射率结构常数时空分布测量方法.pdf
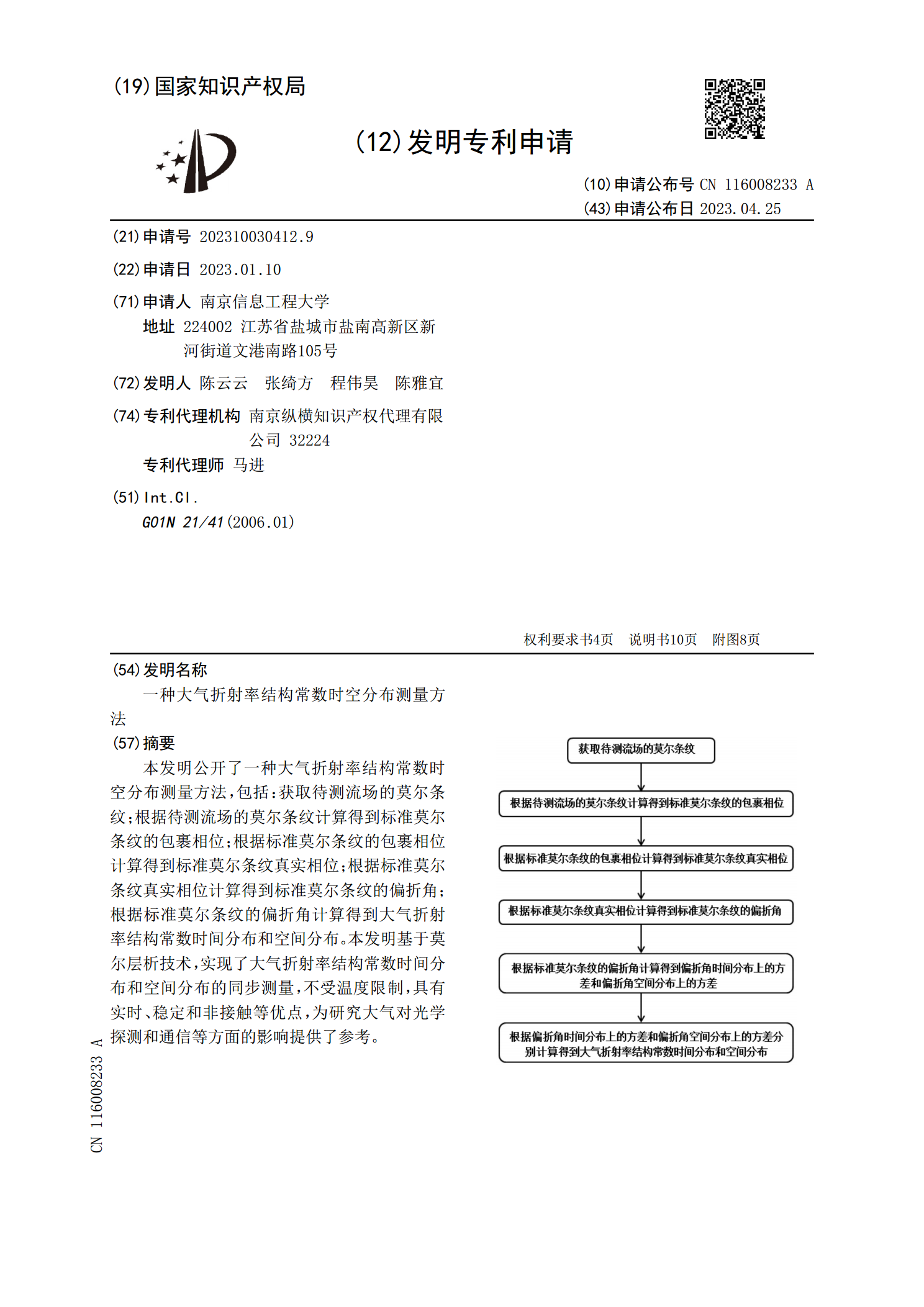
本发明公开了一种大气折射率结构常数时空分布测量方法,包括:获取待测流场的莫尔条纹;根据待测流场的莫尔条纹计算得到标准莫尔条纹的包裹相位;根据标准莫尔条纹的包裹相位计算得到标准莫尔条纹真实相位;根据标准莫尔条纹真实相位计算得到标准莫尔条纹的偏折角;根据标准莫尔条纹的偏折角计算得到大气折射率结构常数时间分布和空间分布。本发明基于莫尔层析技术,实现了大气折射率结构常数时间分布和空间分布的同步测量,不受温度限制,具有实时、稳定和非接触等优点,为研究大气对光学探测和通信等方面的影响提供了参考。