
一种基于云模型和图割相结合的医学图像分割方法.pdf

An****70


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于云模型和图割相结合的医学图像分割方法.pdf
本发明请求保护一种基于云模型和图割相结合的医学图像分割方法。该方法首先对图像进行平滑处理,去除噪点;接着利用逆向云变换分别计算出图像前景和背景的云特征值,利用X条件云发生器计算出每个像素对于前景和背景的隶属度;并计算出数据项和光滑项;然后建立能量函数构造相应网络图并用最大流/最小割算法实现医学图像分割;最后判定分割结果是否满足迭代条件,若满足则输出结果,反之,则重新计算当前分割结果前景和背景的云特征值。本发明通过云模型与图割算法的结合,不但保留了图割方法优良的多特征约束融合能力和全局最优性,还引入云模型的

基于变形轮廓模型和图割的彩色图像快速分割方法.pdf
一种基于变形轮廓模型和图割的彩色图像快速分割方法,包括绘制当前轮廓线、创建自适应宽度的环状区域、对自适应宽度环状区域构造s-t网络、最小代价切割、确定被分割目标的外轮廓线、输出图像中的被分割目标步骤。该方法采用平面式s-t网络,在网络的构造、切割方面更为方便、快捷,在迭代方式下尤为明显,轮廓线单向膨胀可有效地减少相邻环状区域的重叠,采用自适应宽度环状区域后,仅对未达目标轮廓线段进行切割,使得分割效率大幅提高。本发明具有操作简便、分割速度快、精度高、抗噪性强等优点,可用于各种彩色和灰度图像的分割

基于聚类与图割算法的图像分割方法.docx
基于聚类与图割算法的图像分割方法基于聚类与图割算法的图像分割方法摘要:图像分割在计算机视觉和图像处理领域中具有广泛的应用和研究价值。本文基于聚类与图割算法提出了一种图像分割方法。首先,采用聚类算法对图像进行颜色空间上的聚类分析,将图像像素划分为多个不同的颜色类别。然后,根据聚类结果建立了图像的颜色空间图,并将其转化为图割问题。最后,采用图割算法对颜色空间图进行分割,得到最终的图像分割结果。实验结果表明,本文方法在图像分割领域具有较好的效果和应用前景。关键词:图像分割;聚类算法;图割算法;颜色空间引言图像分

基于超像素和图割理论的自动图像分割方法研究.docx
基于超像素和图割理论的自动图像分割方法研究摘要图像分割在计算机视觉领域被广泛应用。本文基于超像素和图割理论,提出了一种自动图像分割方法。首先,使用超像素将图像分成若干个相似的区域,然后使用图割理论将超像素进行加权连接,形成一个能够将图像分割的图。最后,通过对图像分割图进行后处理,得到最终的分割结果。实验结果显示,本文提出的方法能够有效地进行图像分割,取得了较好的分割效果。关键词:超像素;图割理论;图像分割;后处理引言图像分割在计算机视觉领域被广泛应用,其目的是对图像进行分割,将其分成若干个相似的区域。图像
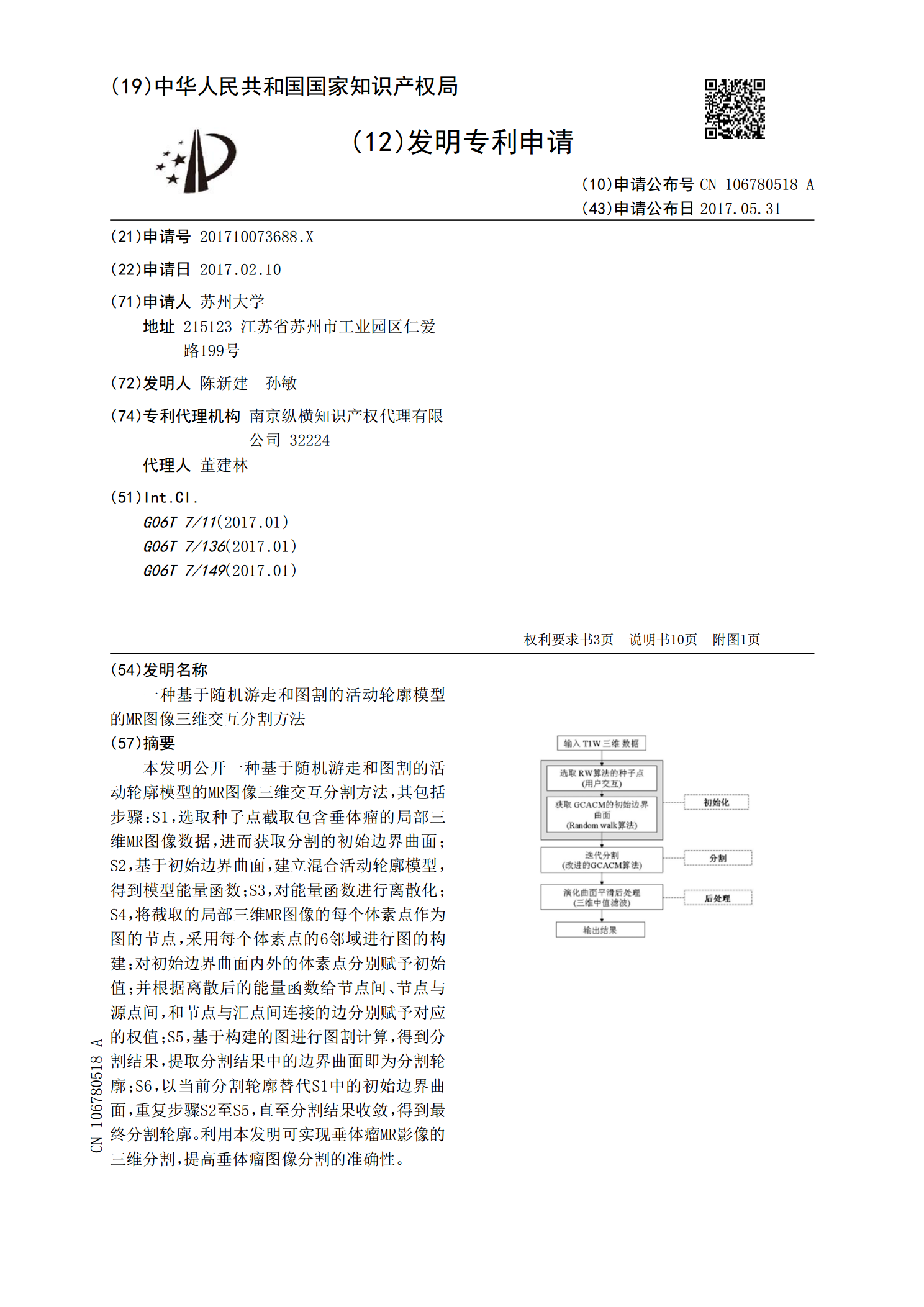
一种基于随机游走和图割的活动轮廓模型的MR图像三维交互分割方法.pdf
本发明公开一种基于随机游走和图割的活动轮廓模型的MR图像三维交互分割方法,其包括步骤:S1,选取种子点截取包含垂体瘤的局部三维MR图像数据,进而获取分割的初始边界曲面;S2,基于初始边界曲面,建立混合活动轮廓模型,得到模型能量函数;S3,对能量函数进行离散化;S4,将截取的局部三维MR图像的每个体素点作为图的节点,采用每个体素点的6邻域进行图的构建;对初始边界曲面内外的体素点分别赋予初始值;并根据离散后的能量函数给节点间、节点与源点间,和节点与汇点间连接的边分别赋予对应的权值;S5,基于构建的图进行图割计