
一种基于自适应智能体模型的复杂人群疏散行为仿真方法.pdf

努力****甲寅


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于自适应智能体模型的复杂人群疏散行为仿真方法.pdf
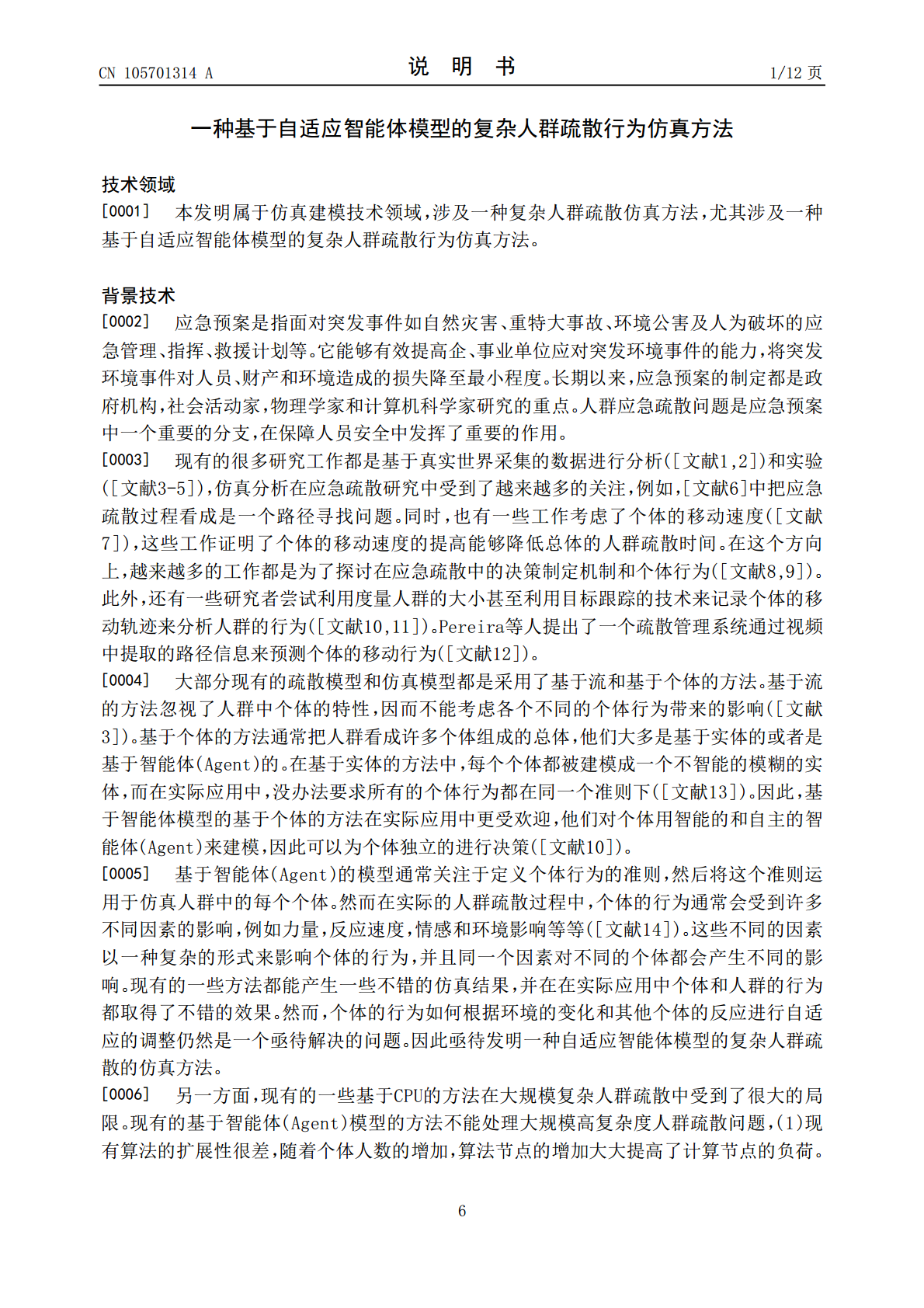
本发明公开了一种基于自适应智能体模型的复杂人群疏散行为仿真方法,采用自适应的智能体模型,给每个智能体定义了四种不同类型的属性,并且能够根据环境的变化自适应的制定每个智能体的逃离线路,因而具有更好的抗环境变化能力。但是普通的基于CPU平台的自适应智能体模型没办法处理复杂人群疏散问题,本发明采用基于CUDA的GPGPU多线程方法开发并行仿真算法,将并行计算思想融入到算法中去,在保留其算法效果的同时大大提高自适应智能体模型执行效率。实验证明,本方法在实际的大规模复杂人群疏散问题中具有更好的效率和可用性。

基于多智能体仿真的人群疏散模型优化研究的开题报告.docx
基于多智能体仿真的人群疏散模型优化研究的开题报告一、选题背景近年来,随着城市化发展的加速,人口密集区域的人口逐年增加。如北京、上海等大城市,人口已经超过2000万。面对人口的增加和城市发展的压力,城市安全问题逐渐成为社会关注的热点。其中,城市人群疏散与应急管理问题就显得尤为重要。在突发事件发生时,如火灾、地震、暴恐袭击等,如何迅速且有效地疏散群众,将受灾范围的损失降到最小,是城市公共安全的重要问题。传统的疏散方式往往是依靠人工的引导和管理,但人工疏散存在很多问题,如机体疲劳、恐慌、不合理引导等。因此,开发
基于力的虚拟人群疏散仿真模型.pptx
基于力的虚拟人群疏散仿真模型目录添加章节标题引言背景介绍目的和意义研究范围和方法虚拟人群疏散仿真模型概述虚拟人群疏散仿真模型的概念虚拟人群疏散仿真模型的分类虚拟人群疏散仿真模型的应用基于力的虚拟人群疏散仿真模型研究现状基于力的虚拟人群疏散仿真模型的研究背景基于力的虚拟人群疏散仿真模型的研究现状基于力的虚拟人群疏散仿真模型存在的问题基于力的虚拟人群疏散仿真模型的建立基于力的虚拟人群疏散仿真模型的建立过程基于力的虚拟人群疏散仿真模型的参数设置基于力的虚拟人群疏散仿真模型的验证方法实验结果分析实验结果展示实验结

基于力的虚拟人群疏散仿真模型的中期报告.docx
基于力的虚拟人群疏散仿真模型的中期报告一、项目背景随着城市人口的增长和城市化进程的加速,城市中的人群疏散问题越来越引起人们的关注。在突发事件发生时,当人群从具有潜在风险的区域撤离时,如何使人群尽快、有序地疏散成为了至关重要的问题。而针对这个问题,虚拟仿真技术成为了一个非常有效的解决方法,并被广泛地应用于城市规划、建筑物设计和应急管理等领域。二、研究目的本研究旨在利用虚拟仿真技术,构建一种基于力的虚拟人群疏散仿真模型,通过模拟不同情景下人群疏散的过程,比较不同疏散方案的效果,为实际应用提供科学依据。三、研究
一种基于路径规划的人群疏散仿真方法及系统.pdf
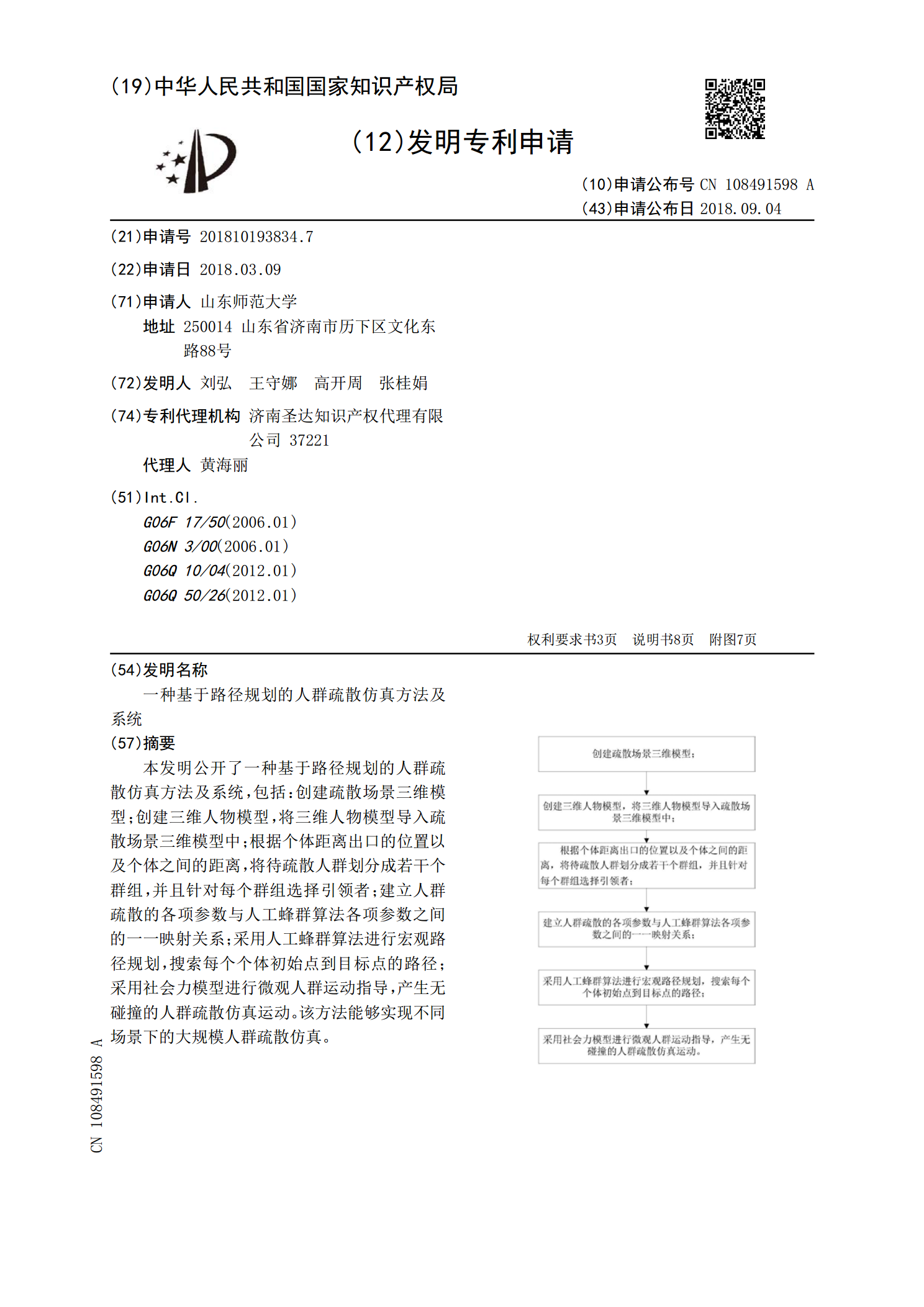
本发明公开了一种基于路径规划的人群疏散仿真方法及系统,包括:创建疏散场景三维模型;创建三维人物模型,将三维人物模型导入疏散场景三维模型中;根据个体距离出口的位置以及个体之间的距离,将待疏散人群划分成若干个群组,并且针对每个群组选择引领者;建立人群疏散的各项参数与人工蜂群算法各项参数之间的一一映射关系;采用人工蜂群算法进行宏观路径规划,搜索每个个体初始点到目标点的路径;采用社会力模型进行微观人群运动指导,产生无碰撞的人群疏散仿真运动。该方法能够实现不同场景下的大规模人群疏散仿真。