
一种基于显著信息的红外图像对比度增强方法.pdf

甲申****66

1/7

2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于显著信息的红外图像对比度增强方法.pdf
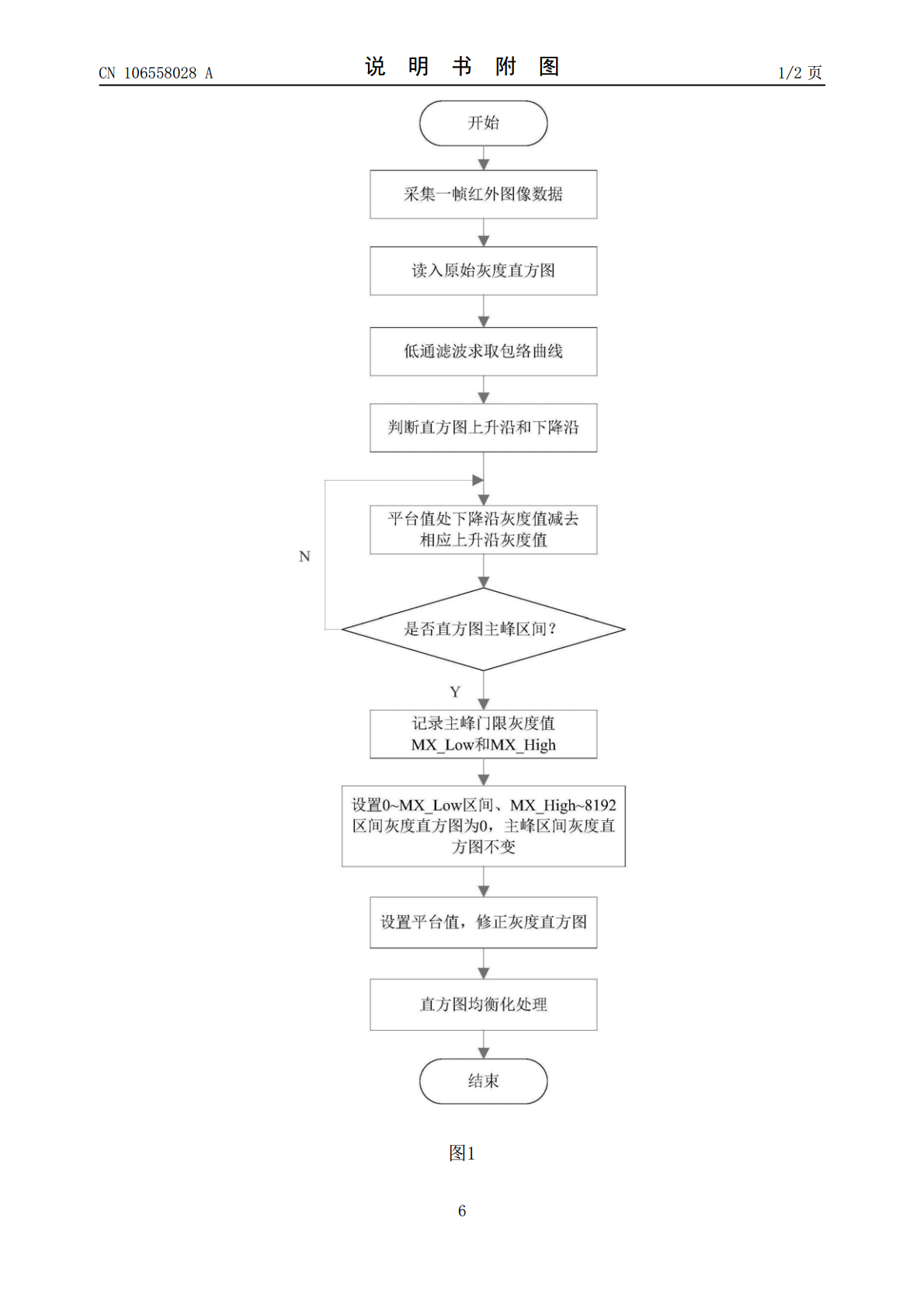
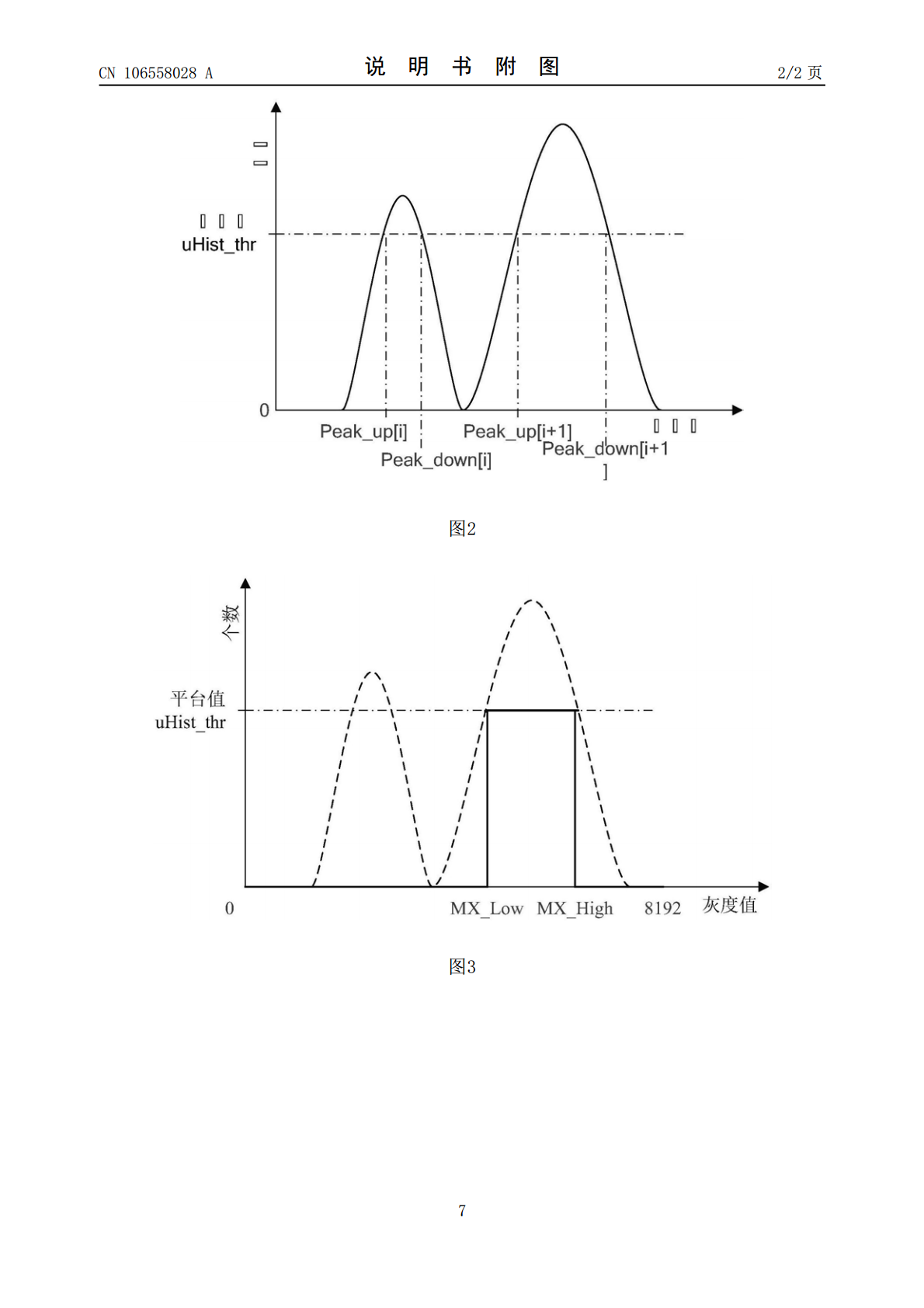
本发明提出一种基于显著信息的红外图像对比度增强方法,该方法结合低通滤波和平台直方图,根据平台值判断直方图上升沿和下降沿,计算出直方图主峰,保留显著目标信息的灰度区间,舍弃其余灰度区间;再经过直方图均衡化处理,得到对比度增强后的红外图像。该方法能够有效增强红外图像对比度,改善图像质量,且方法简单,易于工程实现。
基于灰度级显著度权重的红外图像增强方法及系统.pdf
本发明公开一种基于灰度级显著度权重的红外图像增强方法及系统,所述方法包括:获取红外图像各灰度级所包含的显著度值,建立各灰度级的显著度集合;使用百分位的方式计算各灰度级的显著度权重;采用自适应门限调节部分灰度级的显著度权重;基于调节后的灰度级显著度权重来实现图像增强。本发明提出了基于显著度权重的全局映射红外图像增强方法,实现对比度增强与背景区域抑制的平衡,增强后的图像可有效区分在图像中所占像素数少的目标区域,同时保留了背景区域细节特征,有效提高图像增强质量,不需要复杂运算即可快速实现图像增强。
一种基于直方图的红外图像增强方法.pdf
本发明涉及一种基于直方图的红外图像增强方法,将14位红外图像数据经过盲元补偿和非均匀性校正后,统计红外图像的直方图信息,得到统计直方图序列;确定有效灰度级直方图序列后,选取所有有效灰度级直方图序列的局部极大值,进行去重步骤,将剩余的局部极大值排序,确定阈值;遍历统计直方图序列,确定序列最大值的灰度值;左右遍历,比较各个灰度值对应统计直方图的值与阈值的关系,确定步长;采用以步长t递增的方式做灰度变换。本发明舍弃比背景温度低的部分目标信息,压缩背景部分在8位灰度级中占用的比例,使最终图像的背景偏黑,目标突出。

一种基于融合的红外图像增强方法.pdf
本发明提供一种基于融合的红外图像增强方法,包括S1、接收红外探测器输出的红外图像P;S2、将接收到的所述红外图像P分割为低照度分量P1、中等照度分量P2和高照度分量P3;S3、分别对所述低照度分量P1、所述中等照度分量P2和所述高照度分量P3进行图像增强处理,相对应的得到低照度增强分量P1’、中等照度增强分量P2’和高照度增强分量P3’;S4、对所述步骤S3中所述低照度增强分量P1’、所述中等照度增强分量P2’和所述高照度增强分量P3’进行图像融合处理;S5、输出结果P4。本发明在保留关键性细节信息的同时
一种基于直方图的图像对比度增强检测方法.pdf
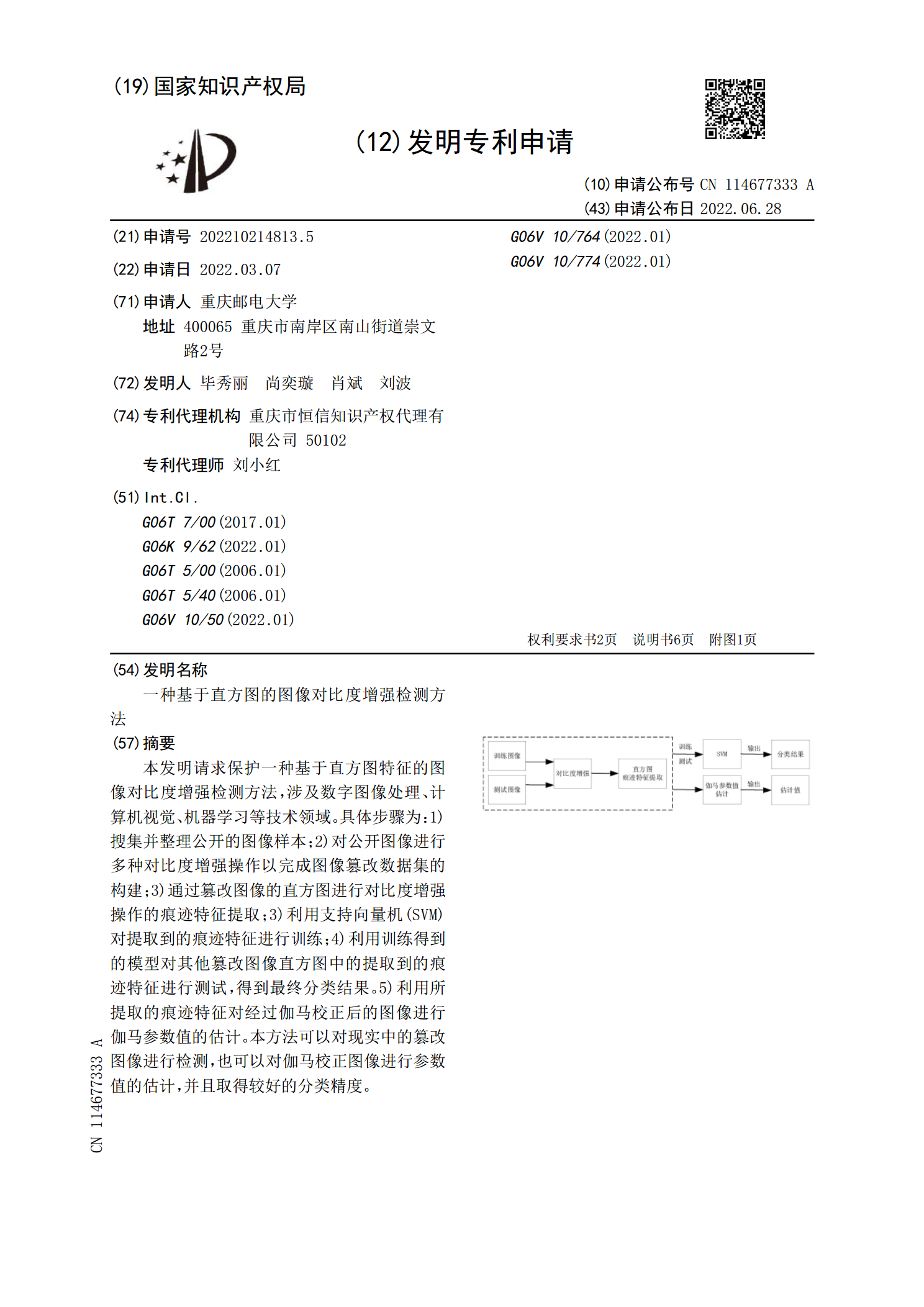
本发明请求保护一种基于直方图特征的图像对比度增强检测方法,涉及数字图像处理、计算机视觉、机器学习等技术领域。具体步骤为:1)搜集并整理公开的图像样本;2)对公开图像进行多种对比度增强操作以完成图像篡改数据集的构建;3)通过篡改图像的直方图进行对比度增强操作的痕迹特征提取;3)利用支持向量机(SVM)对提取到的痕迹特征进行训练;4)利用训练得到的模型对其他篡改图像直方图中的提取到的痕迹特征进行测试,得到最终分类结果。5)利用所提取的痕迹特征对经过伽马校正后的图像进行伽马参数值的估计。本方法可以对现实中的篡改