
一种实现前视雷达高分辨成像的方法.pdf

听云****君哇


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种实现前视雷达高分辨成像的方法.pdf
本发明公开一种实现前视雷达高分辨成像的方法,采用最小二乘求解天线方向图矩阵非方阵问题,并利用截断奇异值分解方法抑制噪声放大,求得目标散射函数估计量,实现前视扫描雷达方位向高分辨成像;本申请考虑到传统的tsvd处理是按方阵奇异值分解然后求逆,但当边缘有目标时,则有可能存在丢失信息的问题,采用最小二乘,不必对原始矩阵进行处理,通过二范数最小求出误差最小解,而且求逆项为方阵可以用奇异值分解降噪求逆,本申请的方法解决了天线方向图矩阵非方阵问题,并保留边缘信息,求得目标散射函数估计量;并分析求解估计量的过程中存在的
一种雷达前视成像快速超分辨方法.pdf
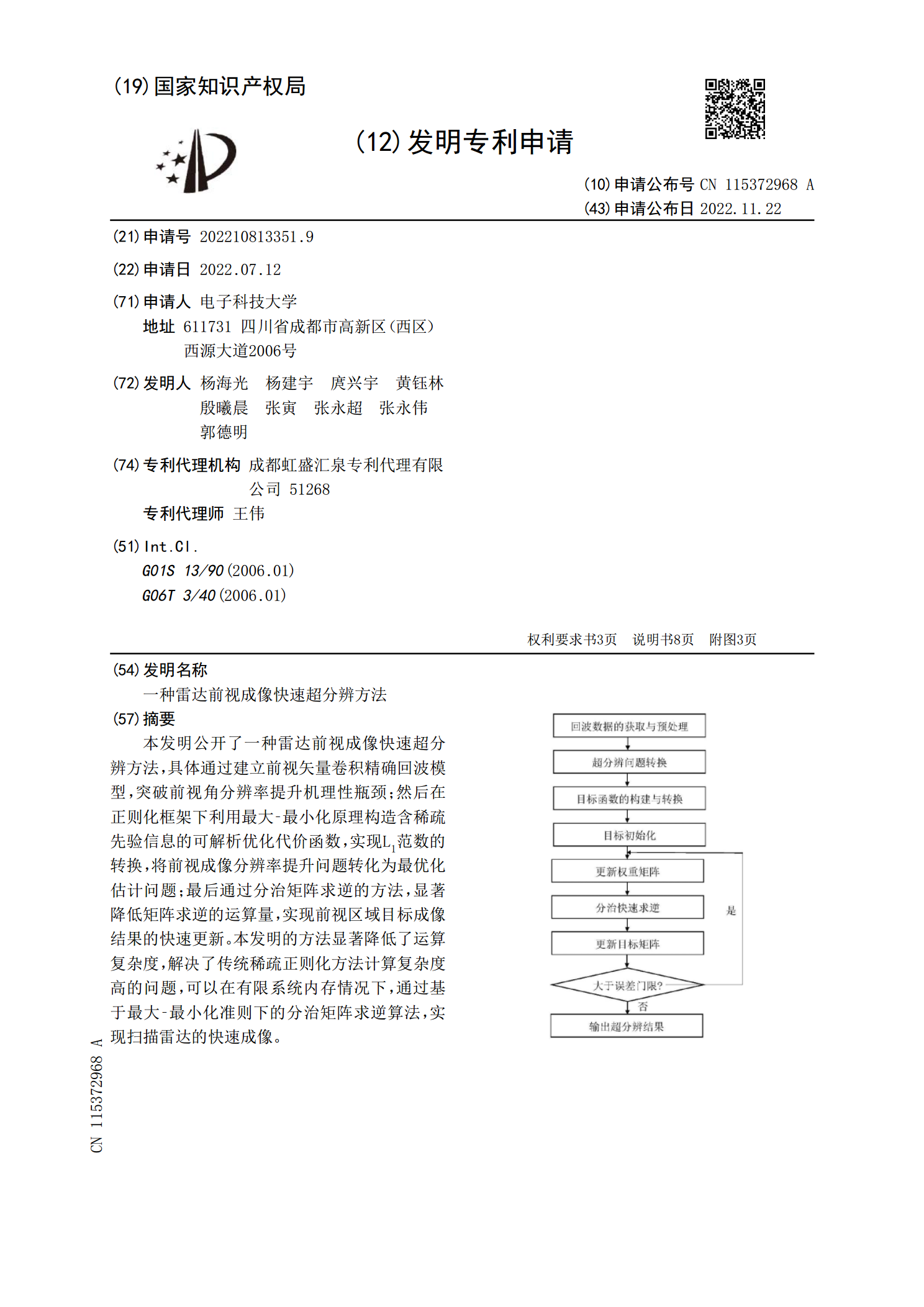
本发明公开了一种雷达前视成像快速超分辨方法,具体通过建立前视矢量卷积精确回波模型,突破前视角分辨率提升机理性瓶颈;然后在正则化框架下利用最大?最小化原理构造含稀疏先验信息的可解析优化代价函数,实现L<base:Sub>1</base:Sub>范数的转换,将前视成像分辨率提升问题转化为最优化估计问题;最后通过分治矩阵求逆的方法,显著降低矩阵求逆的运算量,实现前视区域目标成像结果的快速更新。本发明的方法显著降低了运算复杂度,解决了传统稀疏正则化方法计算复杂度高的问题,可以在有限系统内存情况下,通过基于最大?最
一种机载雷达斜前视超分辨成像方法.pdf
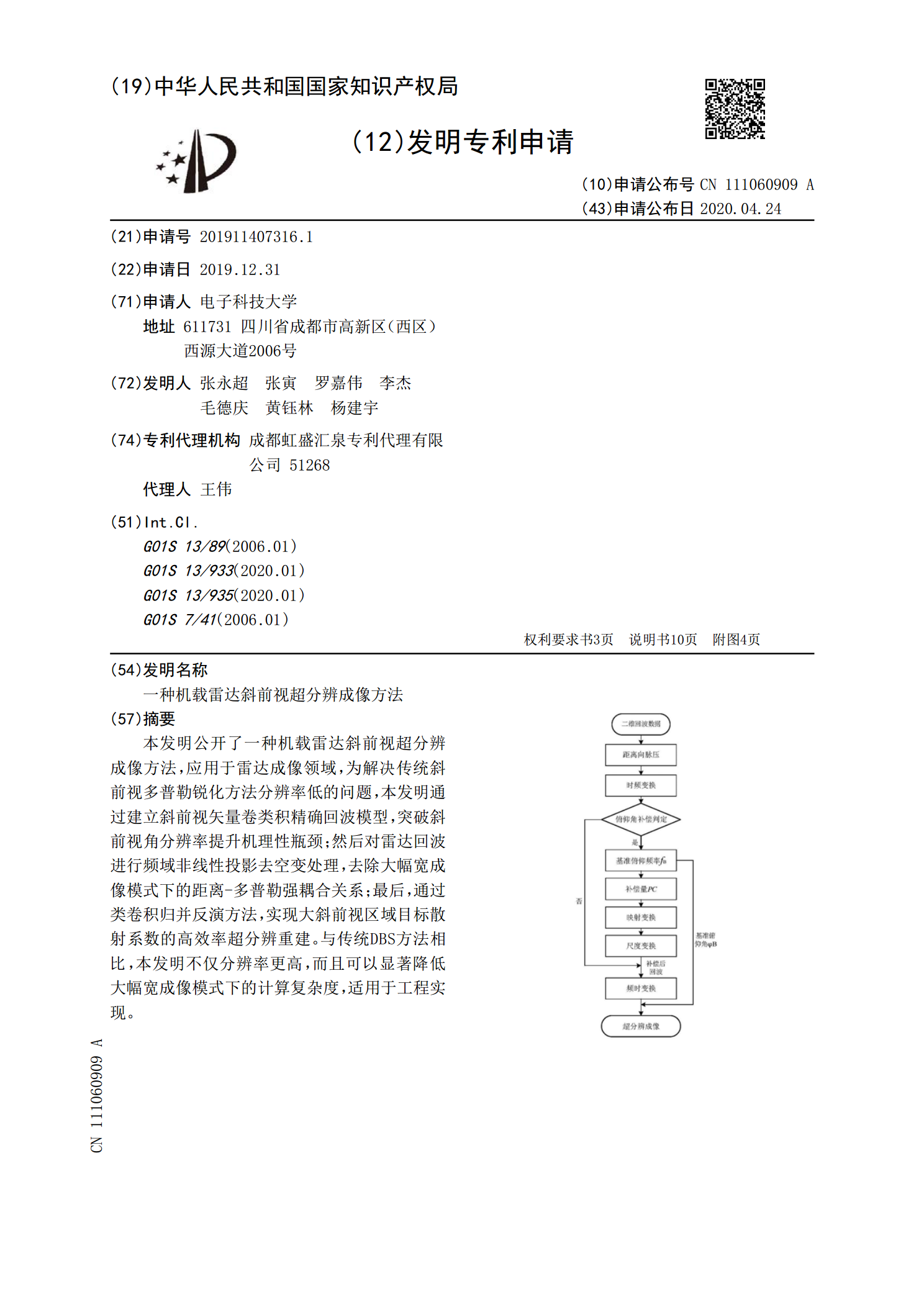
本发明公开了一种机载雷达斜前视超分辨成像方法,应用于雷达成像领域,为解决传统斜前视多普勒锐化方法分辨率低的问题,本发明通过建立斜前视矢量卷类积精确回波模型,突破斜前视角分辨率提升机理性瓶颈;然后对雷达回波进行频域非线性投影去空变处理,去除大幅宽成像模式下的距离‑多普勒强耦合关系;最后,通过类卷积归并反演方法,实现大斜前视区域目标散射系数的高效率超分辨重建。与传统DBS方法相比,本发明不仅分辨率更高,而且可以显著降低大幅宽成像模式下的计算复杂度,适用于工程实现。

一种多通道雷达前视超分辨成像方法.pdf
本发明公开了一种多通道雷达前视超分辨成像方法,首先获取待成像区域的回波数据,通过对获取的数据进行距离向脉冲压缩,进行异常通道检测,得到异常通道位置,然后考虑异常通道和平台运动误差的影响,由惯性导航设备获取平台偏航和横滚,重构导向矩阵,进行超分辨处理,重构目标散射系数实现超分辨成像,得到超分辨成像结果。本发明的方法克服了单基雷达前视成像模糊和成像分辨率低的问题,有助于实现多通道雷达在考虑运动误差和通道缺失情况下的超分辨成像,利用不同通道的脉冲压缩数据的相关性,可以快速检测故障通道并克服其对超分辨率性能的影响

一种实现目标轮廓重构的雷达前视成像方法.pdf
本发明提出了一种实现目标轮廓重构的雷达前视成像方法,属于雷达前视成像领域。针对雷达前视成像过程中目标轮廓边缘不清晰的问题,本发明提出的方法将全变差函数用于雷达前视成像中,保留目标边缘信息,在提高目标方位向分辨的同时,实现前视区域中目标轮廓的清晰重构。基于卷积模型,将提高方位向分辨率的问题转化为卷积反演问题;在卷积反演过程中,将全变差函数应用于正则化方法,建立基于梯度约束的目标函数,增加边缘信息在卷积反演中的权重,避免了目标边缘信息在卷积反演过程丢失。本发明将全变差算子作为正则项来构造目标函数,提升了正则化