
一种基于深度图像的新视点合成方法.pdf

是你****优呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于深度图像的新视点合成方法.pdf
一种基于深度图像的新视点合成方法,对左右参考视点处的纹理图与深度图进行三维变换;搜索左右参考视点深度图中对象的边缘,将边缘像素进行三维变换到新视点处,然后将新视点处对应的深度像素点抹去;对得到的深度图进行中值滤波,并将经过滤波之后的图像与经三维变换得到的深度图进行对比,标记出变化的像素点;对被标记的像素点进行反向投影,投影到原先的参考视点处,再将初始参考纹理图中的像素值,赋给新视点图像中,与被标记像素点坐标相同的像素;再对得到的新视点图像的遮挡区域进行插值;对残留的空洞进行修复,得到最终的新视点图像。本发
基于深度图的虚拟视点图像生成方法.pdf
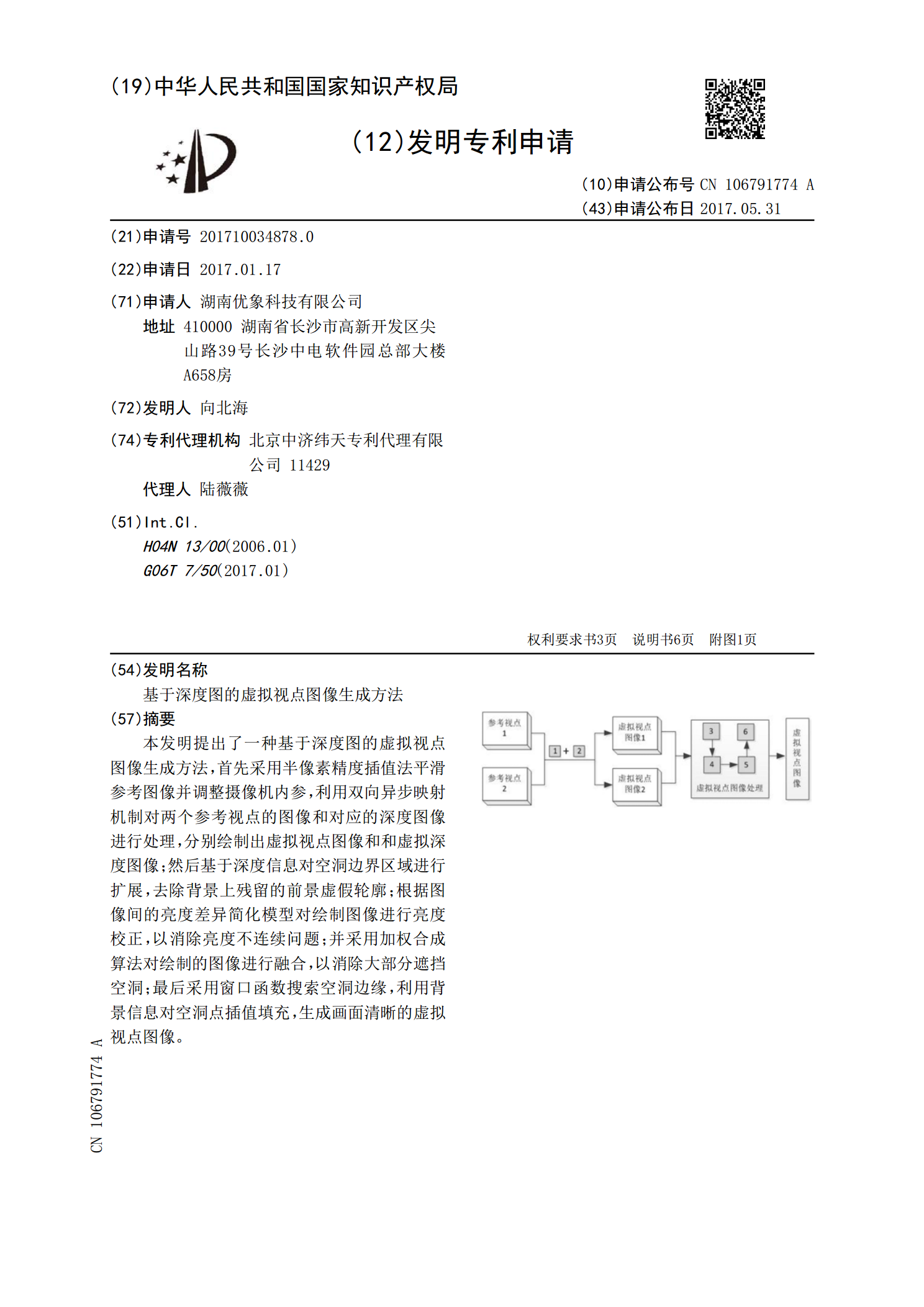
本发明提出了一种基于深度图的虚拟视点图像生成方法,首先采用半像素精度插值法平滑参考图像并调整摄像机内参,利用双向异步映射机制对两个参考视点的图像和对应的深度图像进行处理,分别绘制出虚拟视点图像和和虚拟深度图像;然后基于深度信息对空洞边界区域进行扩展,去除背景上残留的前景虚假轮廓;根据图像间的亮度差异简化模型对绘制图像进行亮度校正,以消除亮度不连续问题;并采用加权合成算法对绘制的图像进行融合,以消除大部分遮挡空洞;最后采用窗口函数搜索空洞边缘,利用背景信息对空洞点插值填充,生成画面清晰的虚拟视点图像。

一种基于隐式神经场景表示进行虚拟视点图像合成的方法.pdf
本发明公开了一种在多视图立体跨视图损失的基础上利用隐式神经场景表示进行虚拟视点图像合成的方法,适用于计算机视觉领域。本方法包括:获取需产生虚拟视点的图像数据集;对训练图像数据集进行预处理,在预处理阶段基于特征匹配算法Sift对输入的训练图像数据集进行特征点提取和匹配;将获得的训练图像数据和所提取特征点信息经处理后输入多层感知器网络中进行训练;将测试图像数据输入训练好的多层感知器网络,后通过体渲染得到测试的渲染图像;基于训练好的多层感知器网络生成虚拟视点图像。由此通过减少神经网络在训练拟合场景表示时的数据量

基于深度图像的虚拟视点绘制方法研究的任务书.docx
基于深度图像的虚拟视点绘制方法研究的任务书任务书一、研究背景和意义随着深度图像获取技术的不断成熟,基于深度图像的虚拟视点绘制技术逐渐成为了一个热门研究领域。虚拟视点绘制技术可以利用已有的深度图像数据快速生成多个视角的图像,可以为多种应用提供支持,如虚拟现实、增强现实、远程会议等。在实际应用中,虚拟视点绘制技术可以为用户提供全方位、全角度的视觉体验,增强用户与虚拟环境之间的沉浸感。当前,基于深度图像的虚拟视点绘制技术仍存在很多问题和挑战。在具体实现上,需要考虑多个因素,如深度图像的质量、绘制的视点数量、光照

基于视点合成的深度图编码技术研究.doc
基于视点合成的深度图编码技术研究自由视点视频(FreeViewpointVideo/Televison,FVV/FTV)能够提供具有丰富沉浸感的立体视频,并且允许用户在一定范围内自由选择观看位置,因此,FTV已经成为视频信号处理领域的下一个重要研究方向。为了实现所期望的业务,FTV除了传输传统2D纹理视频外还需要额外传输深度图像来生成虚拟视点。与纹理视频相比,深度图像具有完全不同的性质和用途,如果直接采用传统纹理视频的编码方式对深度图像进行编码会引起合成视点中的较大失真。所以,在保证虚拟视点合成质量的前提