
基于预测贝叶斯克拉美罗界的相控阵雷达重返和驻留时间分配方法.pdf

森林****来了


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于预测贝叶斯克拉美罗界的相控阵雷达重返和驻留时间分配方法.pdf
本发明公开了一种基于预测贝叶斯克拉美罗界的相控阵雷达重返和驻留时间分配方法。本发明引入后验克拉美罗界作为跟踪性能的准则,首先确立一个以跟踪精度为约束来最小化跟踪资源负载的数学优化模型,然后根据最优化理论,提出了一种转化方法实现了重返和驻留时间的控制。本发明的实施,有效解决雷达波束重返时间和驻留时间分配不合理造成的资源负载过大的技术问题,从而实现了在完成对目标有效跟踪的同时消耗更少的系统资源。
基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法.pdf
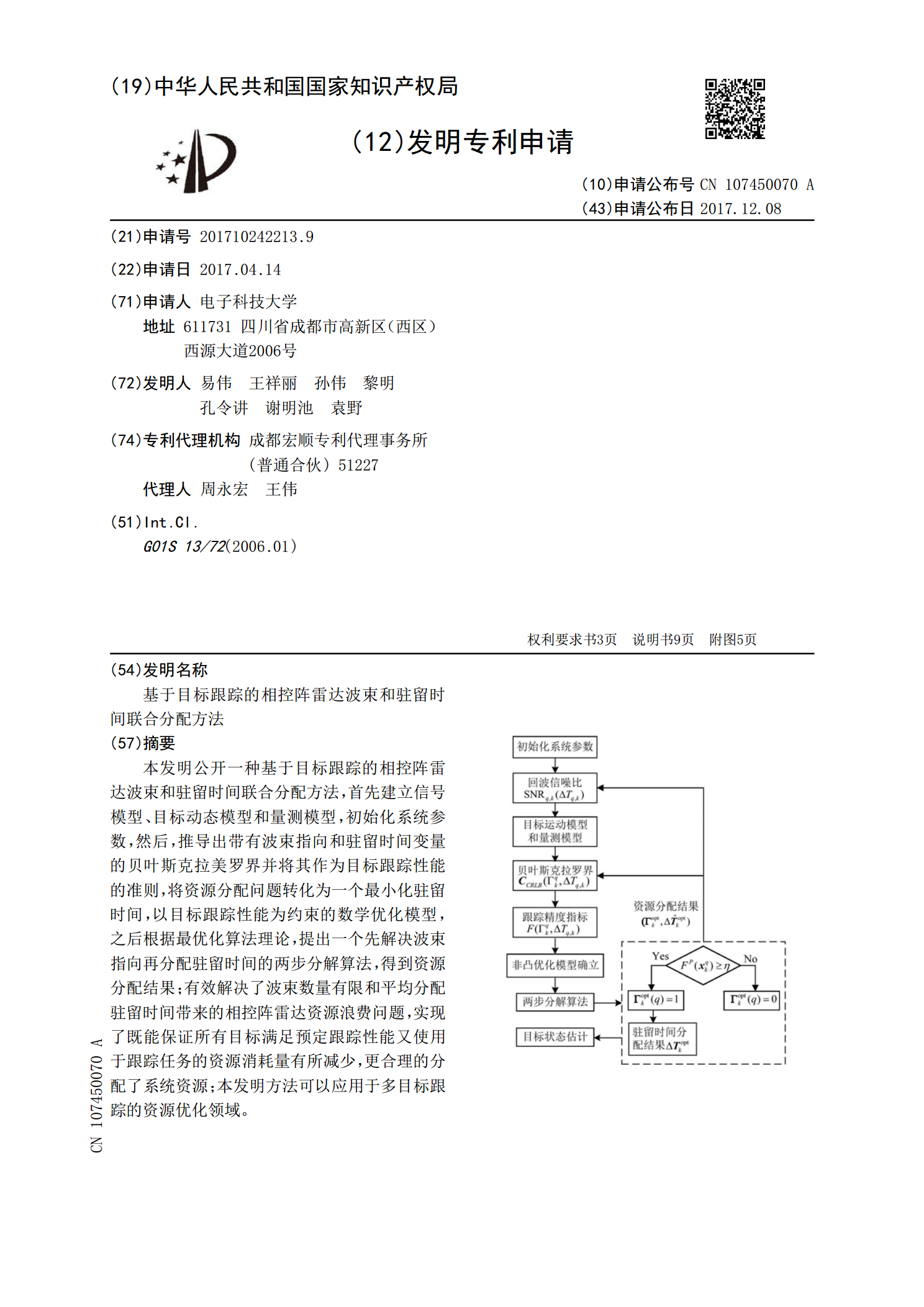
本发明公开一种基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法,首先建立信号模型、目标动态模型和量测模型,初始化系统参数,然后,推导出带有波束指向和驻留时间变量的贝叶斯克拉美罗界并将其作为目标跟踪性能的准则,将资源分配问题转化为一个最小化驻留时间,以目标跟踪性能为约束的数学优化模型,之后根据最优化算法理论,提出一个先解决波束指向再分配驻留时间的两步分解算法,得到资源分配结果;有效解决了波束数量有限和平均分配驻留时间带来的相控阵雷达资源浪费问题,实现了既能保证所有目标满足预定跟踪性能又使用于跟踪任务的资源

基于贝叶斯网络的时间序列预测.docx
基于贝叶斯网络的时间序列预测基于贝叶斯网络的时间序列预测摘要:时间序列预测是许多实际问题的核心,如股票价格预测、天气预报和交通流量预测等。贝叶斯网络是一种有效的用于模型推断和预测的工具。本文将介绍基于贝叶斯网络的时间序列预测方法,包括模型构建、参数估计和推断方法。我们将使用一个股票价格预测的案例来说明这一方法的应用。通过比较实验结果,我们将证明贝叶斯网络是一种可行的时间序列预测方法,能够提供准确的预测结果。关键词:时间序列预测、贝叶斯网络、模型构建、参数估计、推断方法引言:时间序列预测是在给定过去数据的基

一种基于双时间指针的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种新型的相控阵雷达实时自适应驻留调度方法。本发明首先在调度间隔内设置分离点,在分离点左右两侧执行任务时分别采用基于时间指针的波束驻留调度方法,构成了基于双时间指针调度方式。随后,在综合优先级设计中,利用任务工作方式优先级分别与截止期或最早可执行时刻相结合构建一级综合优先级,再和期望执行时刻与实际执行时刻的偏差共同构建二级综合优先级。最终,在不同分离点情况下获得的波束驻留调度序列中,选择代价最小的任务调度序列作为最终调度结果。仿真结果表明,与现有方法相比,此方法兼顾

基于黎曼流形的数字阵雷达波束驻留时间分配.docx
基于黎曼流形的数字阵雷达波束驻留时间分配基于黎曼流形的数字阵雷达波束驻留时间分配摘要:数字阵雷达技术在现代雷达系统中得到广泛应用,其优越的波束形成能力使得它成为了目标探测、定位和跟踪的重要工具。然而,传统数字阵雷达的波束驻留时间分配方法往往只考虑了传播距离,忽略了雷达系统的非线性特性和复杂环境的影响。本文提出了一种基于黎曼流形的数字阵雷达波束驻留时间分配方法,综合考虑了多个因素,以提高雷达系统的性能。关键词:数字阵雷达,波束形成,黎曼流形,波束驻留时间分配1.引言数字阵雷达技术已经成为现代雷达系统研究的热