
一种雷达干扰快速识别方法.pdf

森林****来了


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种雷达干扰快速识别方法.pdf
一种雷达干扰快速识别方法,以AGC突变为前提,进行多目标检测,再根据多目标之间的关系或波形熵的变化,综合判断当前进入距离门的信号种类,实现快速识别常规干扰类型。本发明用一种计算量较小且不需要新增电路模块的方法实现多种干扰的快速识别,为后续干扰对抗措施提供依据的同时预留更为充足的处理时间,适用于箔条干扰、噪声干扰、距离拖引干扰和舷外拖拽等多种干扰同时存在的复杂场景,计算复杂度低,实时性高,干扰识别迅速有效,雷达信号处理系统硬件上不需要新增电路模块,算法简单,便于在工程实际中的应用。
一种相控阵雷达主瓣干扰识别方法.pdf
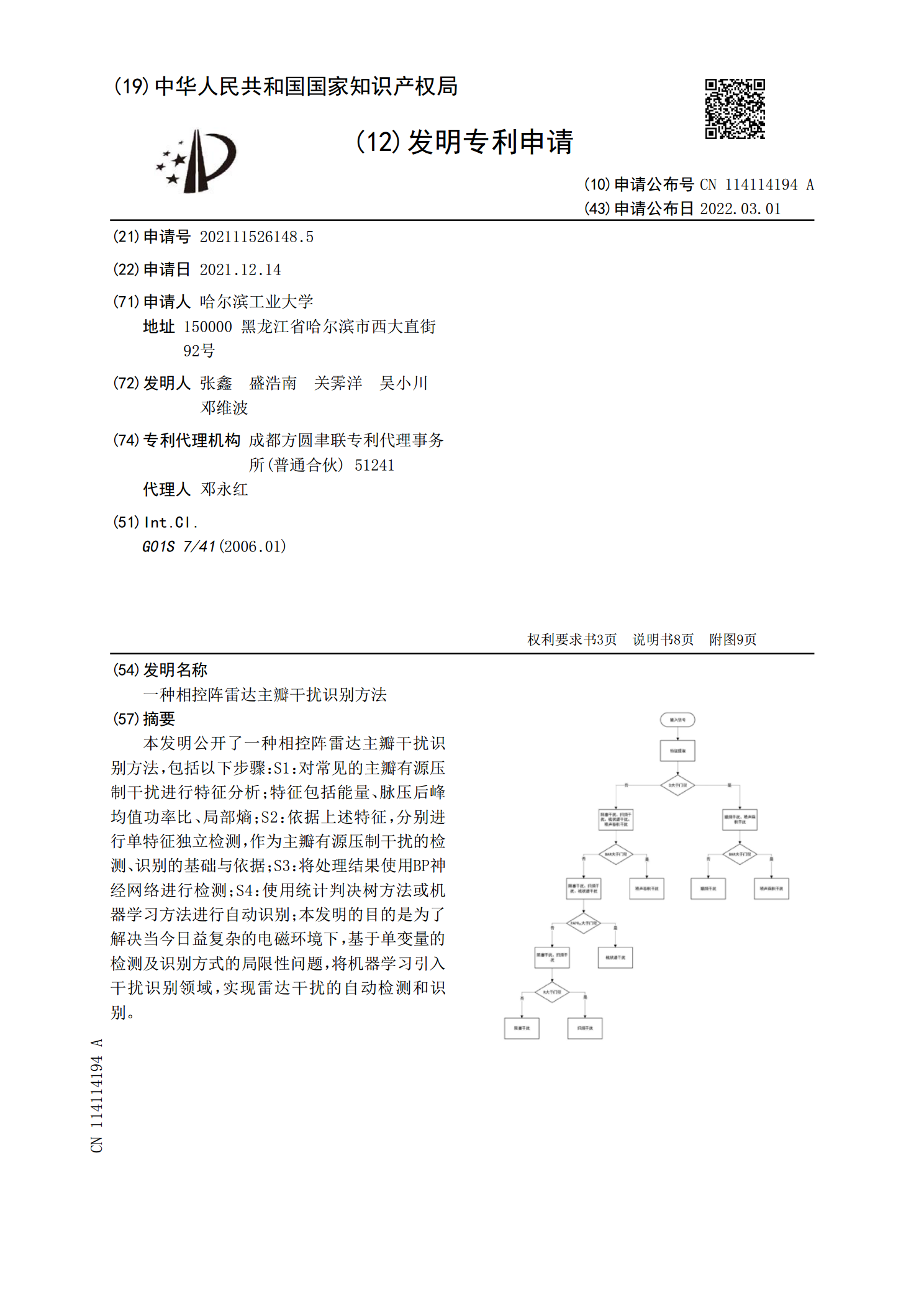
本发明公开了一种相控阵雷达主瓣干扰识别方法,包括以下步骤:S1:对常见的主瓣有源压制干扰进行特征分析;特征包括能量、脉压后峰均值功率比、局部熵;S2:依据上述特征,分别进行单特征独立检测,作为主瓣有源压制干扰的检测、识别的基础与依据;S3:将处理结果使用BP神经网络进行检测;S4:使用统计判决树方法或机器学习方法进行自动识别;本发明的目的是为了解决当今日益复杂的电磁环境下,基于单变量的检测及识别方式的局限性问题,将机器学习引入干扰识别领域,实现雷达干扰的自动检测和识别。

一种LFMCW雷达快速目标识别方法.pdf
本发明涉及一种LFMCW雷达快速目标识别方法,解决现有单通道LFMCW雷达对于行人,车辆目标的识别过程复杂,难以直接应用等问题。该方法将其多普勒频率进行长时间积累,通过多普勒随时间变化获取目标的微多普勒特征的关系完成对行人与车辆目标的分类识别,该算法的计算量要比基于时频分析类方法小的多,并且是对动目标检测(MTD)之后的数据进行处理,不需要再对信号进行复杂的时频变换分析,因而具有很强的实际工程应用能力,仿真试验验证了该方法的正确性。

基于AlexNet的雷达干扰识别方法研究.docx
基于AlexNet的雷达干扰识别方法研究AbstractRadarinterferenceisacommonprobleminmodernradarsystems,itcanseverelydegradetheperformanceofradarsystemsandevencausefailureinmission-criticalapplications.Inthispaper,weproposearadarinterferencerecognitionmethodbasedontheAlexNetde

一种面向雷达网的有源航迹欺骗干扰识别方法及系统.pdf
本发明公开了一种面向雷达网的有源航迹欺骗干扰识别方法,包括:S1获取雷达侦察通道和雷达干扰通道中的脉冲串信号,并提取脉冲串中的慢时域数据;S2基于S1中提取获得的慢时域数据,计算雷达侦察通道和雷达干扰通道之间的脉冲抵达时间差;S3基于S1中提取获得的慢时域数据,计算雷达干扰通道脉冲信号的带宽;S4基于上述步骤获得的参数与预设门限比较判定,识别干扰类型或/和伪雷达回波;S5对S4中获得的伪雷达回波,计算雷达侦察通道脉冲串信号的多普勒信息特征与时域频域特征,与预设门限比较判定,对判定结果进行自检后,输出最终识