
一种基于点云快速重建的STL数模生成方法.pdf

纪阳****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于点云快速重建的STL数模生成方法.pdf
本发明公开了一种基于点云快速重建的STL数模生成方法,包括对输入的点云进行简化滤波并提取特征;对数模表面点云进行曲面重建;在STL数模上建立模型拓补关系,并进行网格简化;对简化后的STL数模进行孔洞检测和修复以去除模型中的缺陷。本发明方法可有效解决基于激光扫描点云的STL模型重建问题,通过点云特征提取和模型重建等步骤生成了STL模型,并通过网格简化和孔洞修复技术实现了对所生成的STL模型表面缺陷的自动修复,从而在保留点云基本特征的前提下实现了STL数模的快速重建并提高了重建出的STL数模的可用度,可满足智
一种基于迭代泊松表面重建的三维点云生成表面方法.pdf
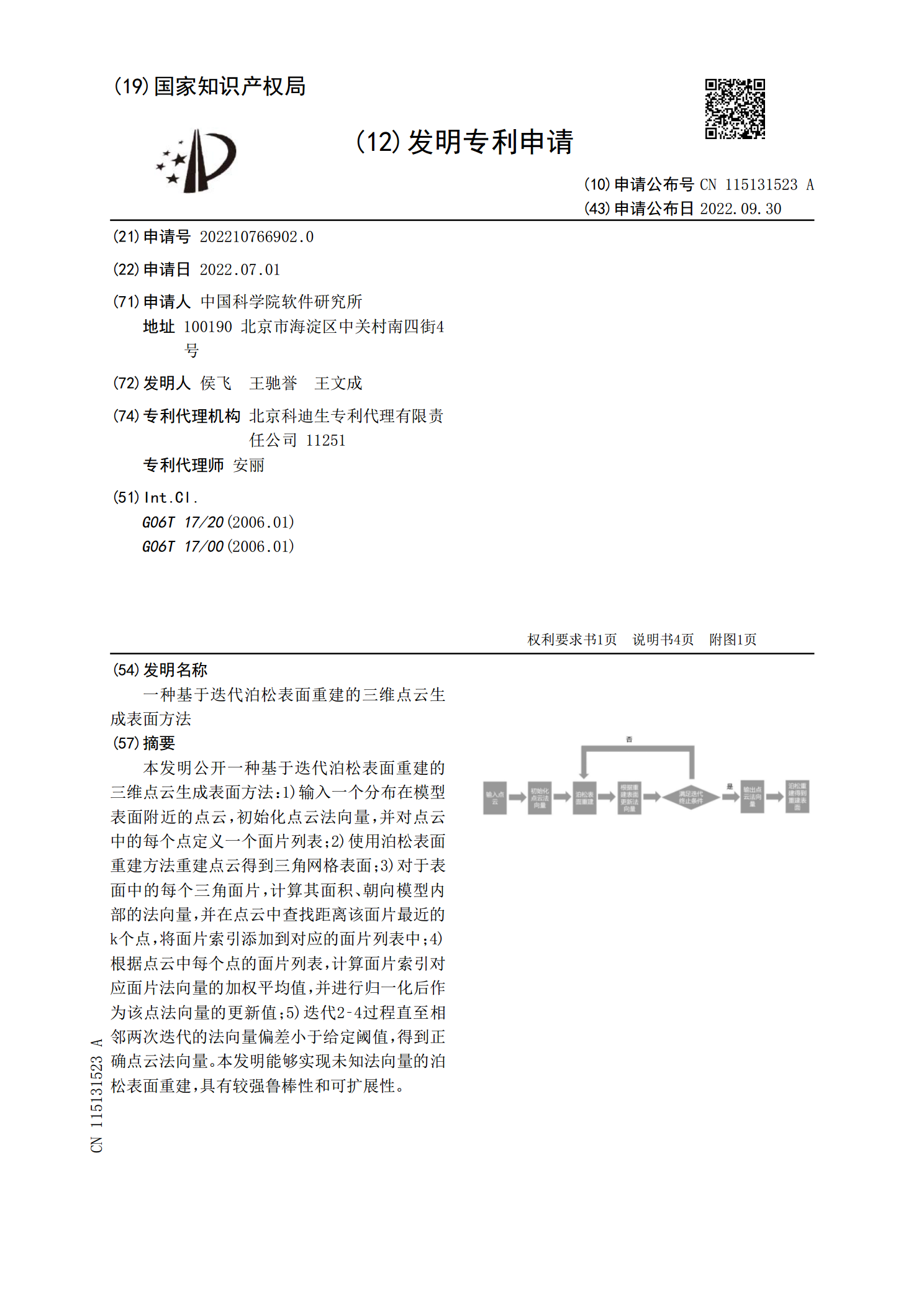
本发明公开一种基于迭代泊松表面重建的三维点云生成表面方法:1)输入一个分布在模型表面附近的点云,初始化点云法向量,并对点云中的每个点定义一个面片列表;2)使用泊松表面重建方法重建点云得到三角网格表面;3)对于表面中的每个三角面片,计算其面积、朝向模型内部的法向量,并在点云中查找距离该面片最近的k个点,将面片索引添加到对应的面片列表中;4)根据点云中每个点的面片列表,计算面片索引对应面片法向量的加权平均值,并进行归一化后作为该点法向量的更新值;5)迭代2?4过程直至相邻两次迭代的法向量偏差小于给定阈值,得到

一种基于点云数据快速生成建筑物断面图的方法.docx
一种基于点云数据快速生成建筑物断面图的方法标题:一种基于点云数据快速生成建筑物断面图的方法摘要:点云数据是三维建筑物模型重建和分析的重要数据源。然而,当前的点云数据建模方法中,由于数据规模庞大、数据噪声较高以及复杂的几何结构,生成建筑物断面图仍然是一项具有挑战性的任务。本论文提出了一种基于点云数据的快速生成建筑物断面图的方法。该方法通过点云数据的处理和分析,利用深度学习和计算机视觉技术,实现了对点云数据的高精度建模和断面图的快速生成。1.引言建筑物的断面图对于建筑设计和结构分析具有重要意义。传统的断面图生

一种激光雷达点云数据的快速重建方法.pdf
本发明公开了一种激光雷达点云数据的快速重建方法,首先获取激光雷达发送的距离数据和二维振镜发送的角度数据,转换为三维点云坐标,并进行格式化操作;然后对点云数据进行聚类标记和拟合,以剔除离群点;接着遍历相邻扫描线寻找基准线,并以两基准线为一组进行三角网格化;最后结合三角网格和设定的物体模型光照参数进行上色渲染,完成物体重建。本发明避免了传统方法的空洞效应,并且具有速度快、精度高和鲁棒性好等突出优势。

基于GPU并行三角化的点云模型快速重建方法.docx
基于GPU并行三角化的点云模型快速重建方法基于GPU并行三角化的点云模型快速重建方法摘要:在近年来,点云模型的重建一直是计算机视觉领域研究的热点之一。本文提出了一种基于图形处理单元(GraphicalProcessingUnit,GPU)并行三角化的点云模型快速重建方法。该方法利用了GPU的强大并行计算能力,通过将点云数据分割为多个子问题,同时利用GPU的多线程并行处理,大大提高了点云模型的重建速度。同时,本文还介绍了一种通过GPU加速的三角化算法,以进一步提高重建效率。实验结果表明,本文提出的方法在点云