
一种基于ORB-SLAM2的双目三维稠密建图方法.pdf

骊蓉****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于ORB-SLAM2的双目三维稠密建图方法.pdf
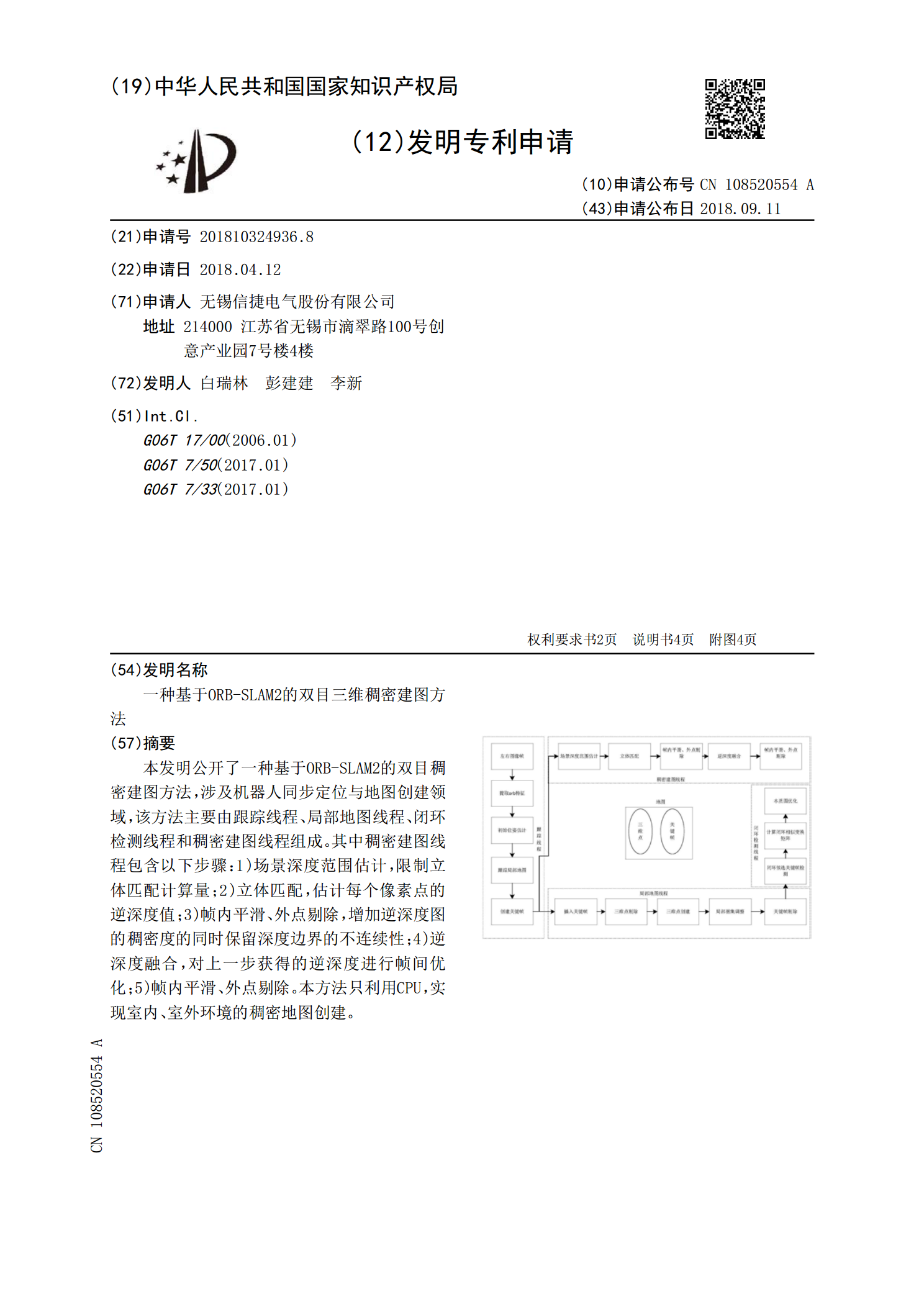
本发明公开了一种基于ORB‑SLAM2的双目稠密建图方法,涉及机器人同步定位与地图创建领域,该方法主要由跟踪线程、局部地图线程、闭环检测线程和稠密建图线程组成。其中稠密建图线程包含以下步骤:1)场景深度范围估计,限制立体匹配计算量;2)立体匹配,估计每个像素点的逆深度值;3)帧内平滑、外点剔除,增加逆深度图的稠密度的同时保留深度边界的不连续性;4)逆深度融合,对上一步获得的逆深度进行帧间优化;5)帧内平滑、外点剔除。本方法只利用CPU,实现室内、室外环境的稠密地图创建。
一种基于DNN立体匹配模块的双目视觉SLAM稠密建图方法.pdf
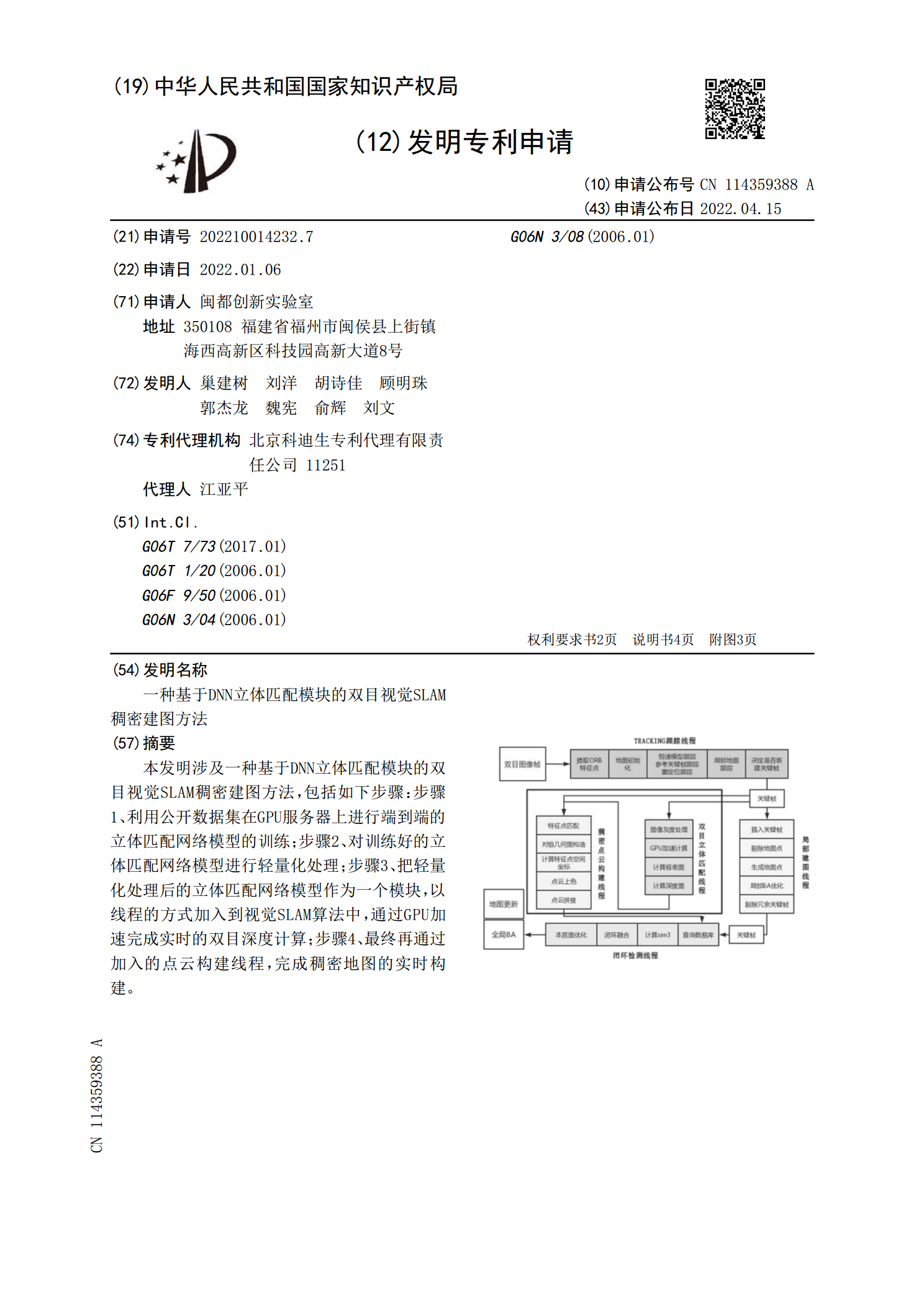
本发明涉及一种基于DNN立体匹配模块的双目视觉SLAM稠密建图方法,包括如下步骤:步骤1、利用公开数据集在GPU服务器上进行端到端的立体匹配网络模型的训练;步骤2、对训练好的立体匹配网络模型进行轻量化处理;步骤3、把轻量化处理后的立体匹配网络模型作为一个模块,以线程的方式加入到视觉SLAM算法中,通过GPU加速完成实时的双目深度计算;步骤4、最终再通过加入的点云构建线程,完成稠密地图的实时构建。

一种基于全景双目视觉的稠密三维地图重建方法及系统.pdf
本发明涉及一种基于全景双目视觉的稠密三维地图重建方法及系统,其方法包括:S1、利用相对分布的两个全景相机同步采集数对棋盘格图像;S2、利用数对棋盘格图像对全景相机进行标定,得到内参以及每个棋盘格相对于两个全景相机的外参矩阵;标定两个全景相机的相机坐标系间的变换矩阵;利用相机坐标系间的变换矩阵,将两个全景相机的相机坐标系对齐标定至系统坐标系下;S3、将三维单位向量球面按照经纬度等矩形展开,得到两幅在经度方向对齐、纬度方向存在视差的全景展开图;S4、基于两幅全景展开图,计算得到稠密视差图像;S5、计算每个空间
一种基于单目相机进行稠密建图的方法.pdf
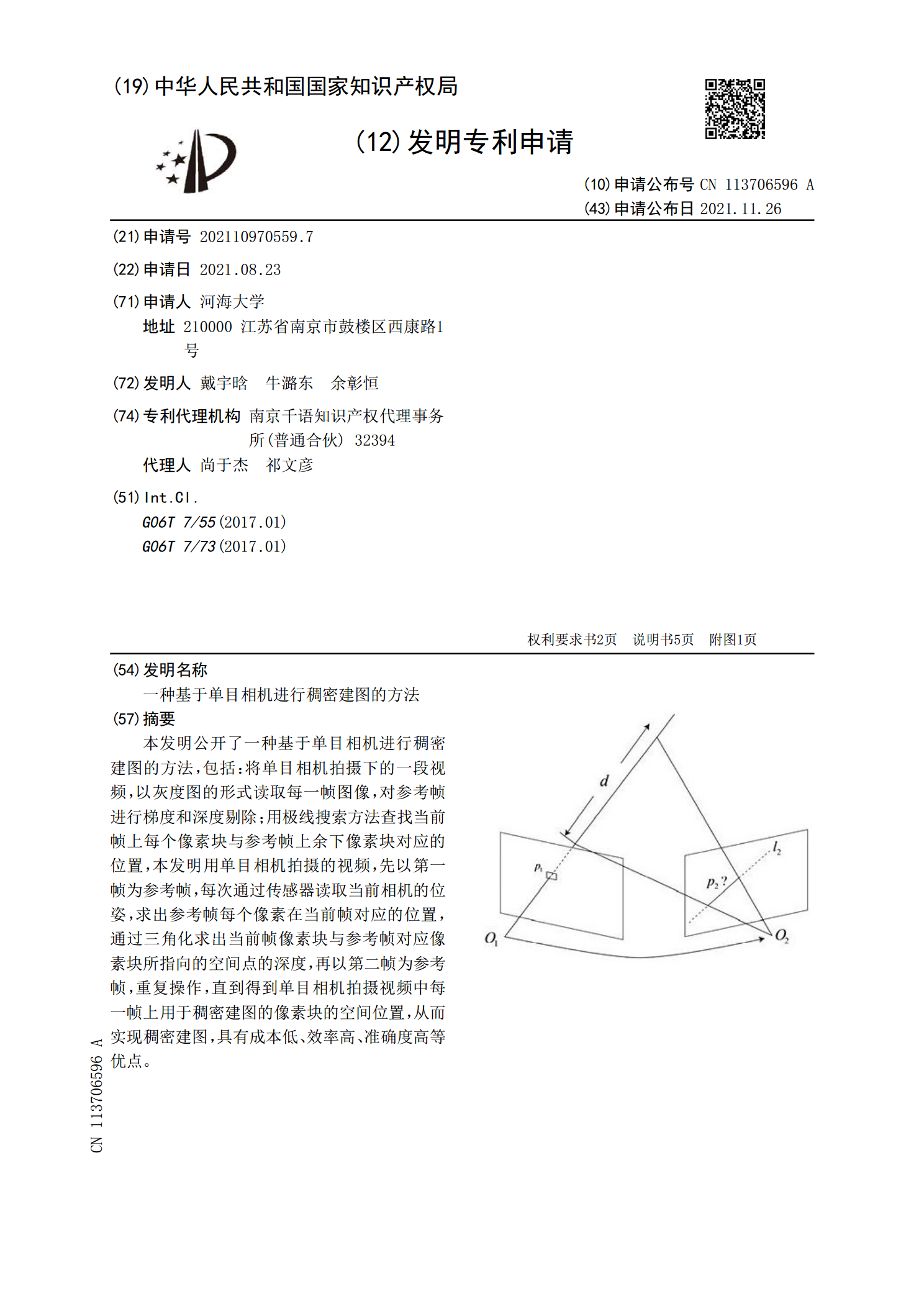
本发明公开了一种基于单目相机进行稠密建图的方法,包括:将单目相机拍摄下的一段视频,以灰度图的形式读取每一帧图像,对参考帧进行梯度和深度剔除;用极线搜索方法查找当前帧上每个像素块与参考帧上余下像素块对应的位置,本发明用单目相机拍摄的视频,先以第一帧为参考帧,每次通过传感器读取当前相机的位姿,求出参考帧每个像素在当前帧对应的位置,通过三角化求出当前帧像素块与参考帧对应像素块所指向的空间点的深度,再以第二帧为参考帧,重复操作,直到得到单目相机拍摄视频中每一帧上用于稠密建图的像素块的空间位置,从而实现稠密建图,具
一种基于频繁稠密模式的图分类方法.pdf
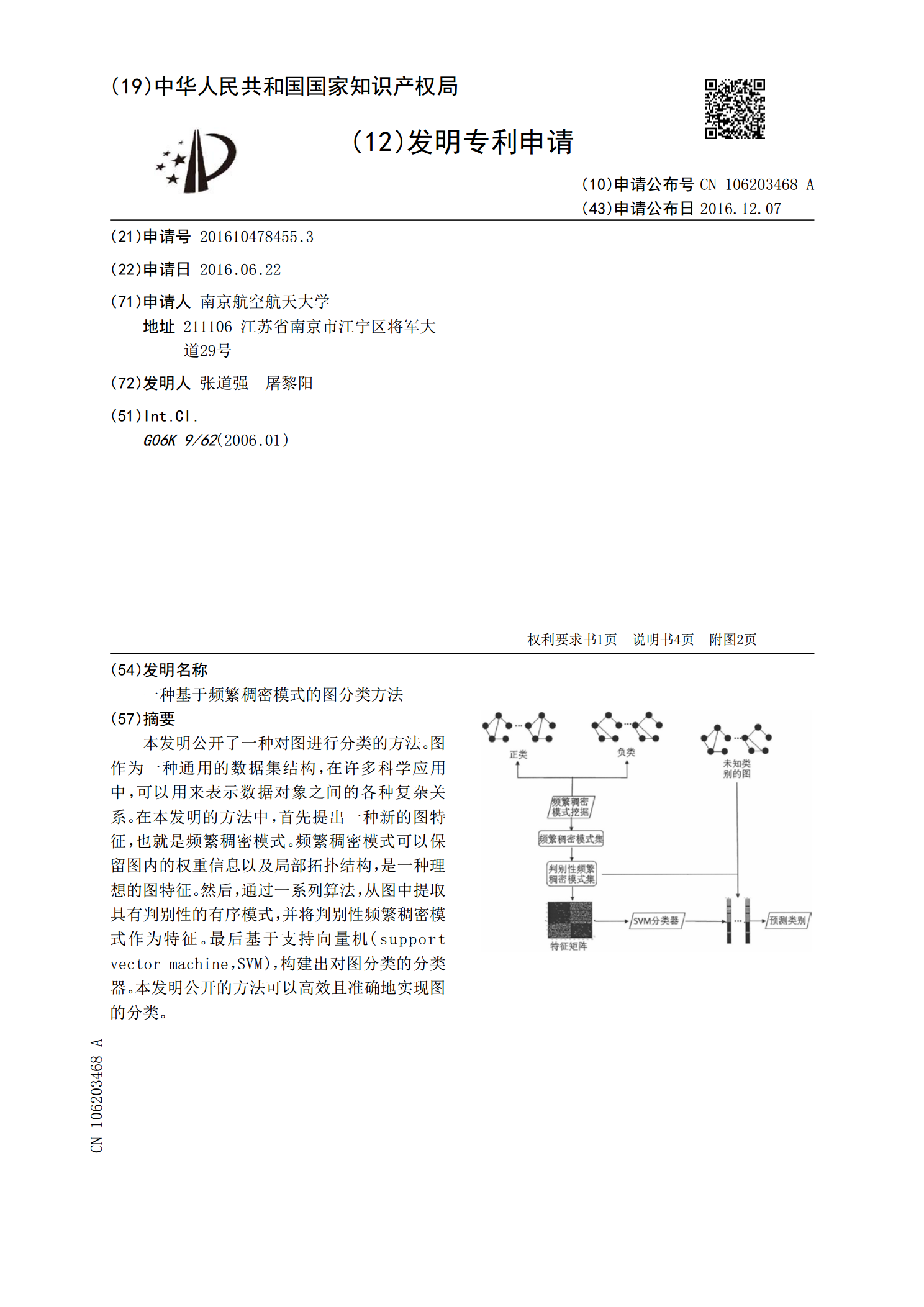
本发明公开了一种对图进行分类的方法。图作为一种通用的数据集结构,在许多科学应用中,可以用来表示数据对象之间的各种复杂关系。在本发明的方法中,首先提出一种新的图特征,也就是频繁稠密模式。频繁稠密模式可以保留图内的权重信息以及局部拓扑结构,是一种理想的图特征。然后,通过一系列算法,从图中提取具有判别性的有序模式,并将判别性频繁稠密模式作为特征。最后基于支持向量机(supportvectormachine,SVM),构建出对图分类的分类器。本发明公开的方法可以高效且准确地实现图的分类。