
目标跟踪中基于多模型优化多假设的多目标数据关联方法.pdf

森林****来了


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

目标跟踪中基于多模型优化多假设的多目标数据关联方法.pdf
本发明提供目标跟踪中基于多模型优化多假设的多目标数据关联方法。针对实际目标跟踪中,目标运动模型是变化的,引入交互式多模型滤波器,对每个模型的模型概率和状态估计进行计算,得到目标当前的运动模型,实现对多目标的交互式跟踪。为解决多假设跟踪算法假设计算量大的问题,需要合理的删减低概率的假设,将目标径向速度信息加入到航迹置信度判断中,进行航迹删除,只保留置信度高的航迹进行概率计算,保证初始航迹确认的准确性和置信度参数的可靠性。并且通过选用串行结构的多雷达,将上一个雷达处理后的状态估计作为中间值,直至将多雷达的量测

基于多假设的多平台多目标数据关联方法.docx
基于多假设的多平台多目标数据关联方法随着技术的不断发展,各行业之间的数据交流和共享变得越来越普遍,这就意味着需要对大量以不同形式和格式存储在不同平台上的数据进行整合和关联。本篇文章将介绍一种基于多假设的多平台多目标数据关联方法,旨在有效处理数据之间的复杂关系,并为数据分析提供更多的有用信息。如何进行数据关联?在许多情况下,一组数据只能被正确地理解和分析当它们与其他数据集相互关联。但是,在实践中,数据的关联可能会受到多种因素的影响。例如:数据可能存储在不同的位置、不同的格式、存在不同的数量级或具有差异化的结
基于多假设跟踪数据关联的红外弱小目标搜索跟踪方法.pdf
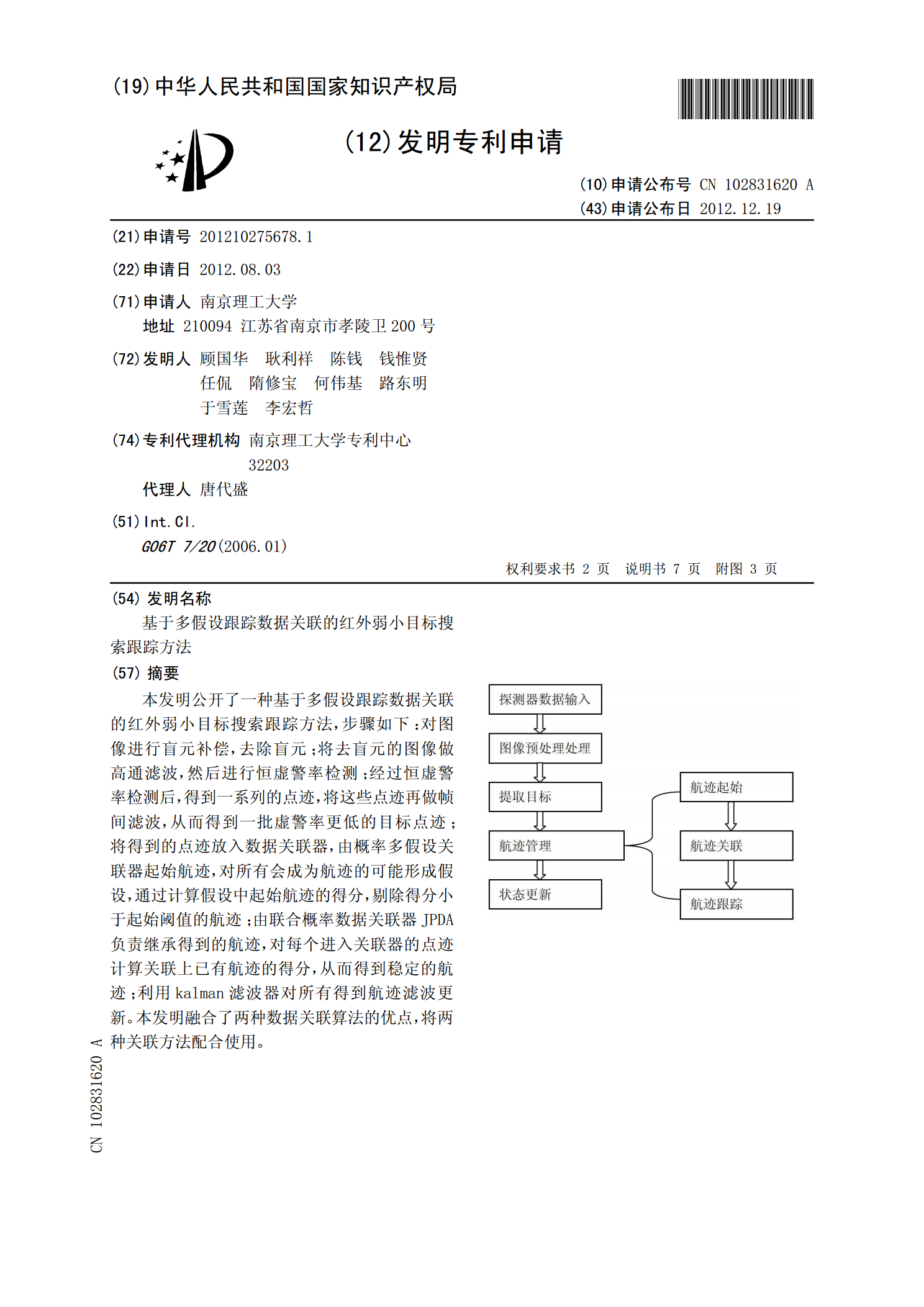
本发明公开了一种基于多假设跟踪数据关联的红外弱小目标搜索跟踪方法,步骤如下:对图像进行盲元补偿,去除盲元;将去盲元的图像做高通滤波,然后进行恒虚警率检测;经过恒虚警率检测后,得到一系列的点迹,将这些点迹再做帧间滤波,从而得到一批虚警率更低的目标点迹;将得到的点迹放入数据关联器,由概率多假设关联器起始航迹,对所有会成为航迹的可能形成假设,通过计算假设中起始航迹的得分,剔除得分小于起始阈值的航迹;由联合概率数据关联器JPDA负责继承得到的航迹,对每个进入关联器的点迹计算关联上已有航迹的得分,从而得到稳定的航迹

一种基于多模型融合和数据关联的多目标跟踪方法.pdf
本发明公开一种基于多模型融合和数据关联的多目标跟踪方法,其首先利用帧间差分法检测出运动目标轮廓和质心坐标;接着融合金字塔光流法和卡尔曼滤波预测下一时刻运动目标的质心坐标;然后将质心坐标预测值和下一时刻质心坐标检测值之间的欧式距离构成效益矩阵,利用匈牙利算法进行数据关联得到最优匹配;最后去除跟踪器中不满足要求的部分,同时为未指派的检测建立跟踪单元,从而实现多目标跟踪;本发明方法受光线变化和背景噪声干扰较小,解决了目标遮挡或目标间相互干扰导致的跟踪失效,提供多目标跟踪的准确率,具有较好的实时性和鲁棒性。

基于多特征匹配的多目标跟踪方法.pdf
一种基于多特征匹配的多目标跟踪算法,其步骤是:首先,针对量测点与目标关联时,匹配特征数量过少的问题,建立了所有目标的特征矩阵,特征矩阵包含了所有目标的检验统计量特征和多普勒频率特征;其次,在寻找最佳关联点时,将所有关联点的特征与目标的特征矩阵进行比对,找出与目标匹配度最高的关联点;最后,确定目标在当前跟踪时刻的运动状态估计值、检验统计量和多普勒频率特征,用于对目标在当前跟踪时刻之后运动状态的估计。本发明通过建立特征矩阵,并寻找与目标特征矩阵最匹配的关联点,解决了当多目标轨迹交叉重叠时目标轨迹跟踪不准确的问