
一种针对微线段加工的全局曲率连续光顺方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种针对微线段加工的全局曲率连续光顺方法.pdf
本发明公开了一种针对微线段加工的全局曲率连续光顺方法,采用三次NURBS曲线建立刀位轨迹模型,使刀位点的拟合曲线的二阶导数全局连续。本发明解决了现有拟合方法中,对于不满足拟合条件的点进行保留或简单处理,连接处仅仅G0或者G1连续的技术问题。采用三点圆拟合方法,估算多条微线段中连续相邻三个刀位点的拟合误差;将拟合误差≤拟合误差阈值的微线段集合定义为A型微线段集合;将拟合误差>拟合误差阈值的微线段集合定义为B型微线段集合;对于A型微线段集合,利用关键点的选取和首尾二阶导矢连续的插值拟合法,实现了数据量的压缩。
叶片曲面整体曲率光顺方法.pdf
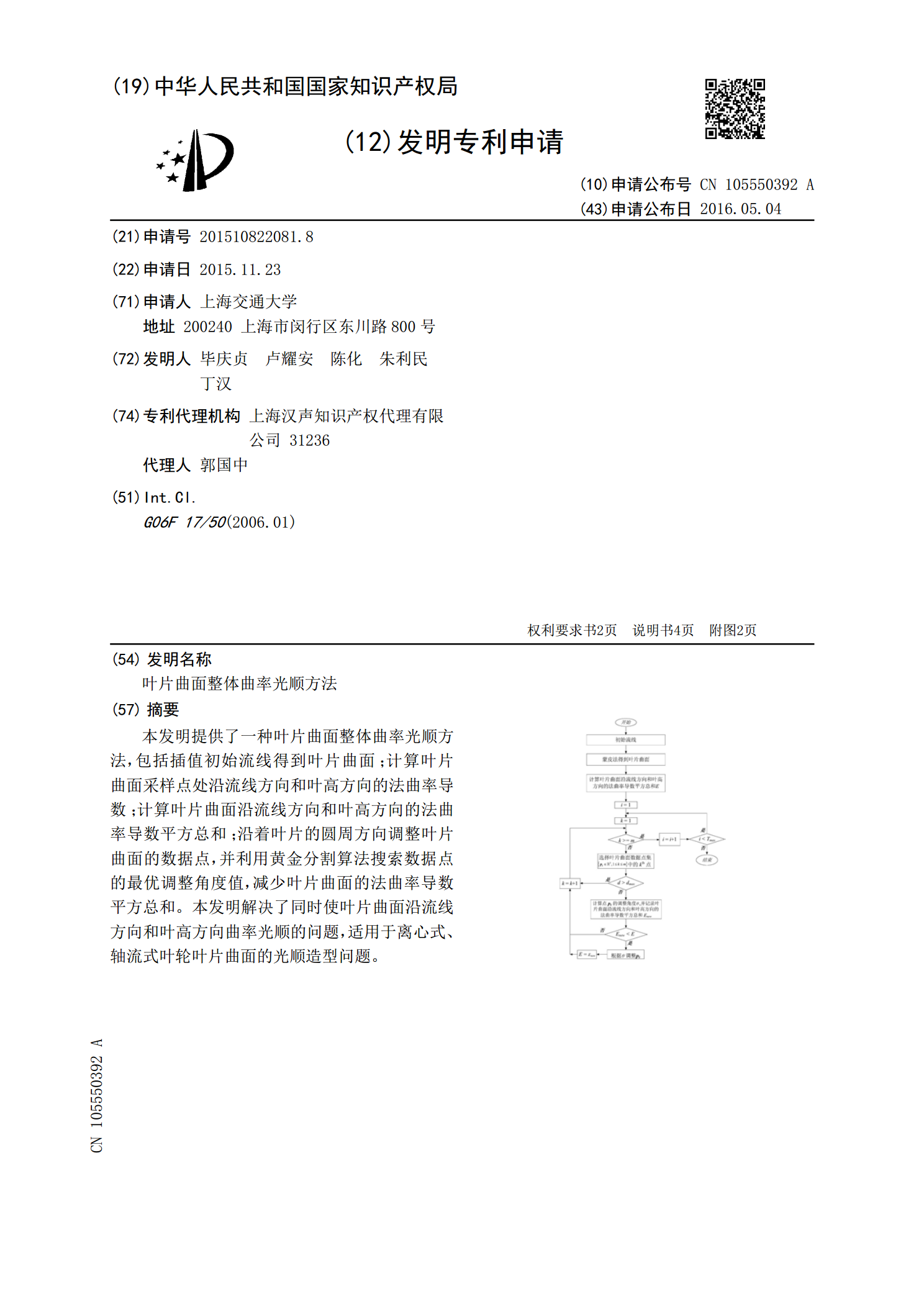
本发明提供了一种叶片曲面整体曲率光顺方法,包括插值初始流线得到叶片曲面;计算叶片曲面采样点处沿流线方向和叶高方向的法曲率导数;计算叶片曲面沿流线方向和叶高方向的法曲率导数平方总和;沿着叶片的圆周方向调整叶片曲面的数据点,并利用黄金分割算法搜索数据点的最优调整角度值,减少叶片曲面的法曲率导数平方总和。本发明解决了同时使叶片曲面沿流线方向和叶高方向曲率光顺的问题,适用于离心式、轴流式叶轮叶片曲面的光顺造型问题。

一种误差可控的小线段轨迹光顺方法.pdf
一种误差可控的小线段轨迹光顺方法,包括如下步骤:步骤1、机器人轨迹点预处理:对整条轨迹的所有轨迹点进行遍历,根据轨迹点之间的距离和夹角进行分段,将整条轨迹划分为若干段折线段集合;步骤2、轨迹点光顺:遍历步骤1生成的折线段集合,对每一条折线段按照轨迹点误差阈值、弦高误差阈值、连续性要求和光顺要求,计算光顺轨迹。本发明将小线段轨迹光顺生成满足连续性、保形和误差要求的光顺轨迹,提高数控加工或工业机器人应用的工作效率和工作质量;光顺曲线适用于不同连续性和执行效率的需求;与现有过渡方法相比,本发明的光顺曲线能够控制
一种微曲率半径天线激光加工扫描轨迹优化方法.pdf
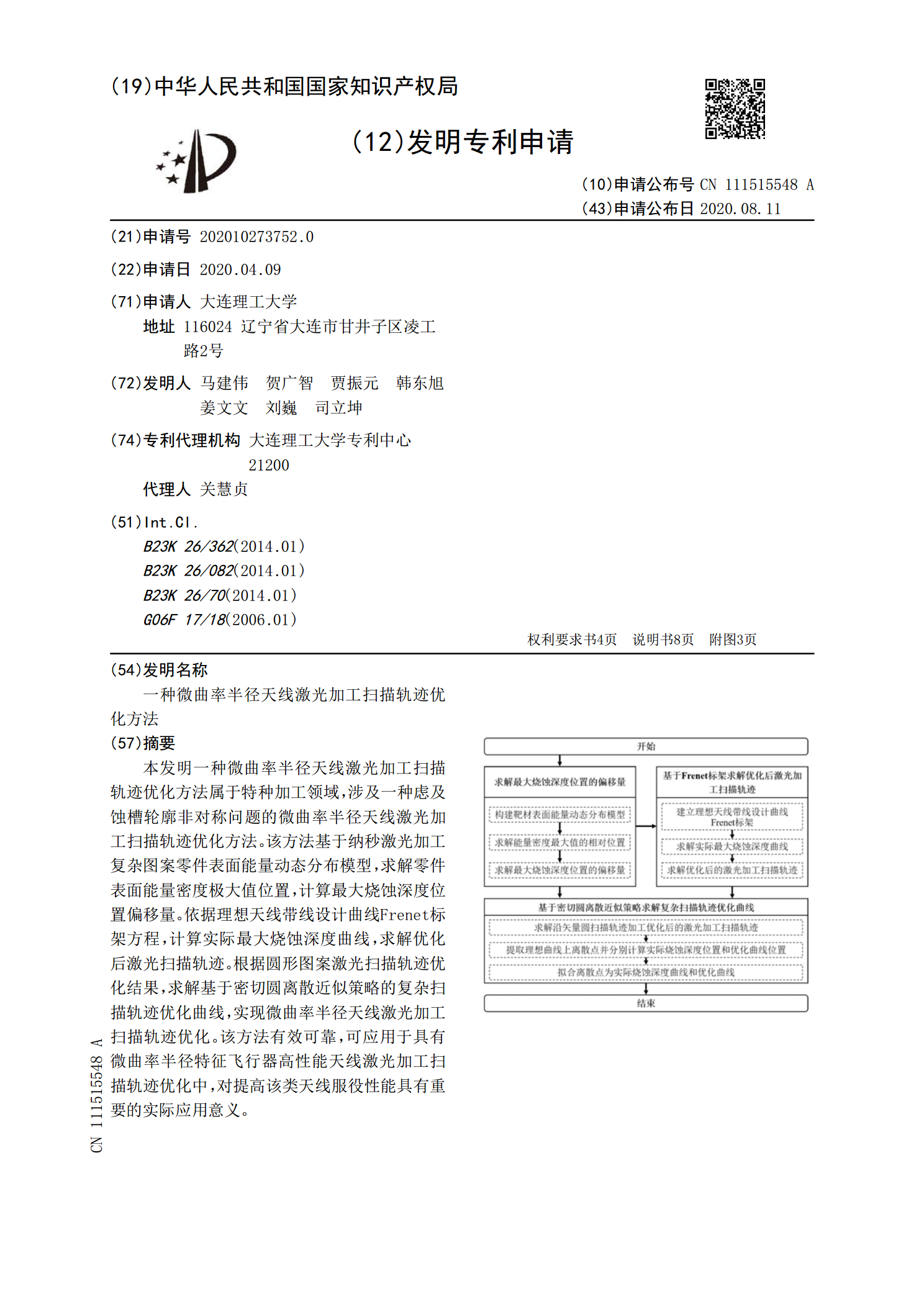
本发明一种微曲率半径天线激光加工扫描轨迹优化方法属于特种加工领域,涉及一种虑及蚀槽轮廓非对称问题的微曲率半径天线激光加工扫描轨迹优化方法。该方法基于纳秒激光加工复杂图案零件表面能量动态分布模型,求解零件表面能量密度极大值位置,计算最大烧蚀深度位置偏移量。依据理想天线带线设计曲线Frenet标架方程,计算实际最大烧蚀深度曲线,求解优化后激光扫描轨迹。根据圆形图案激光扫描轨迹优化结果,求解基于密切圆离散近似策略的复杂扫描轨迹优化曲线,实现微曲率半径天线激光加工扫描轨迹优化。该方法有效可靠,可应用于具有微曲率半
基于曲率极大值优化的刀具轨迹光顺方法和系统.pdf
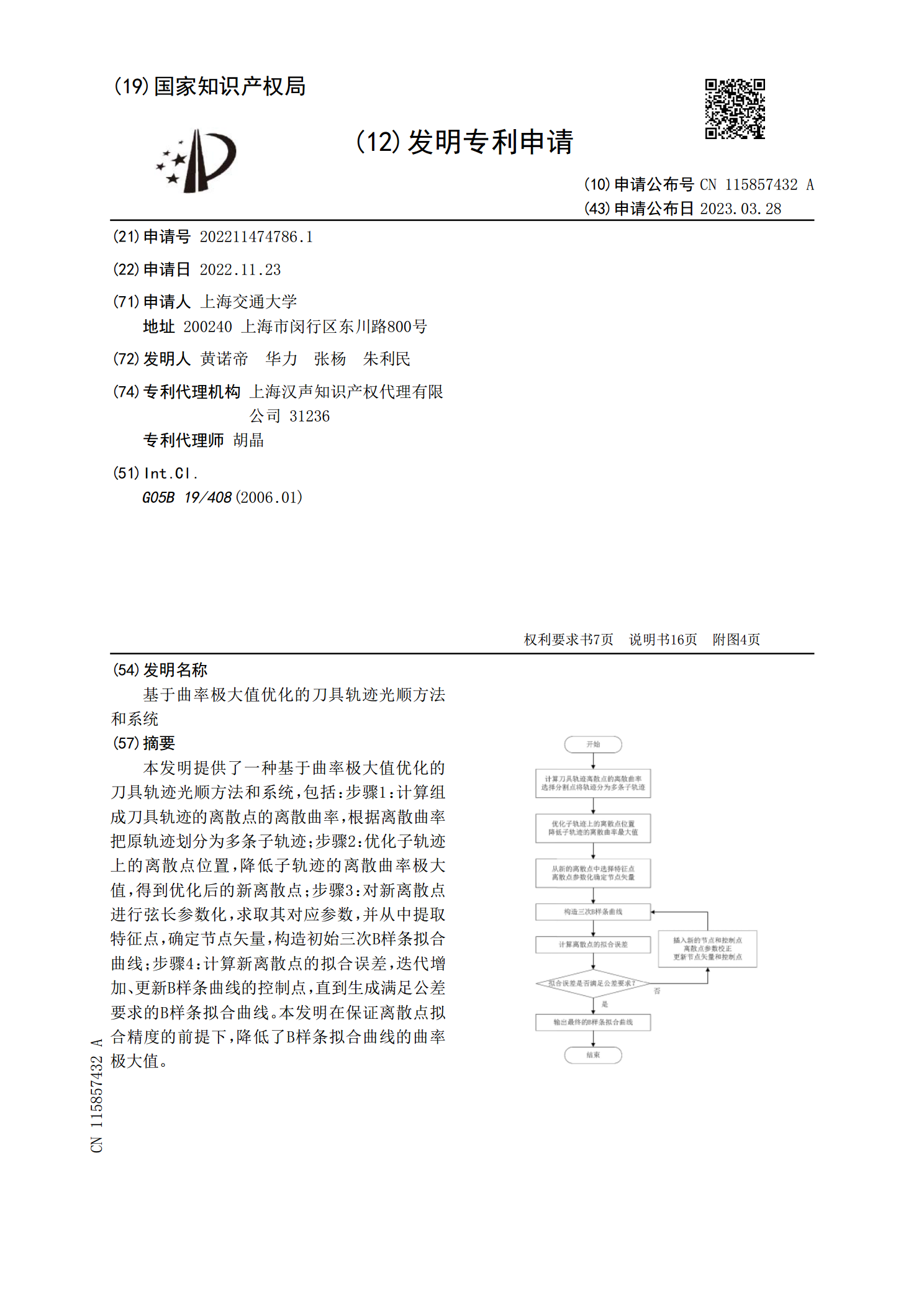
本发明提供了一种基于曲率极大值优化的刀具轨迹光顺方法和系统,包括:步骤1:计算组成刀具轨迹的离散点的离散曲率,根据离散曲率把原轨迹划分为多条子轨迹;步骤2:优化子轨迹上的离散点位置,降低子轨迹的离散曲率极大值,得到优化后的新离散点;步骤3:对新离散点进行弦长参数化,求取其对应参数,并从中提取特征点,确定节点矢量,构造初始三次B样条拟合曲线;步骤4:计算新离散点的拟合误差,迭代增加、更新B样条曲线的控制点,直到生成满足公差要求的B样条拟合曲线。本发明在保证离散点拟合精度的前提下,降低了B样条拟合曲线的曲率极