
基于曲率极大值优化的刀具轨迹光顺方法和系统.pdf

鹏飞****可爱

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于曲率极大值优化的刀具轨迹光顺方法和系统.pdf
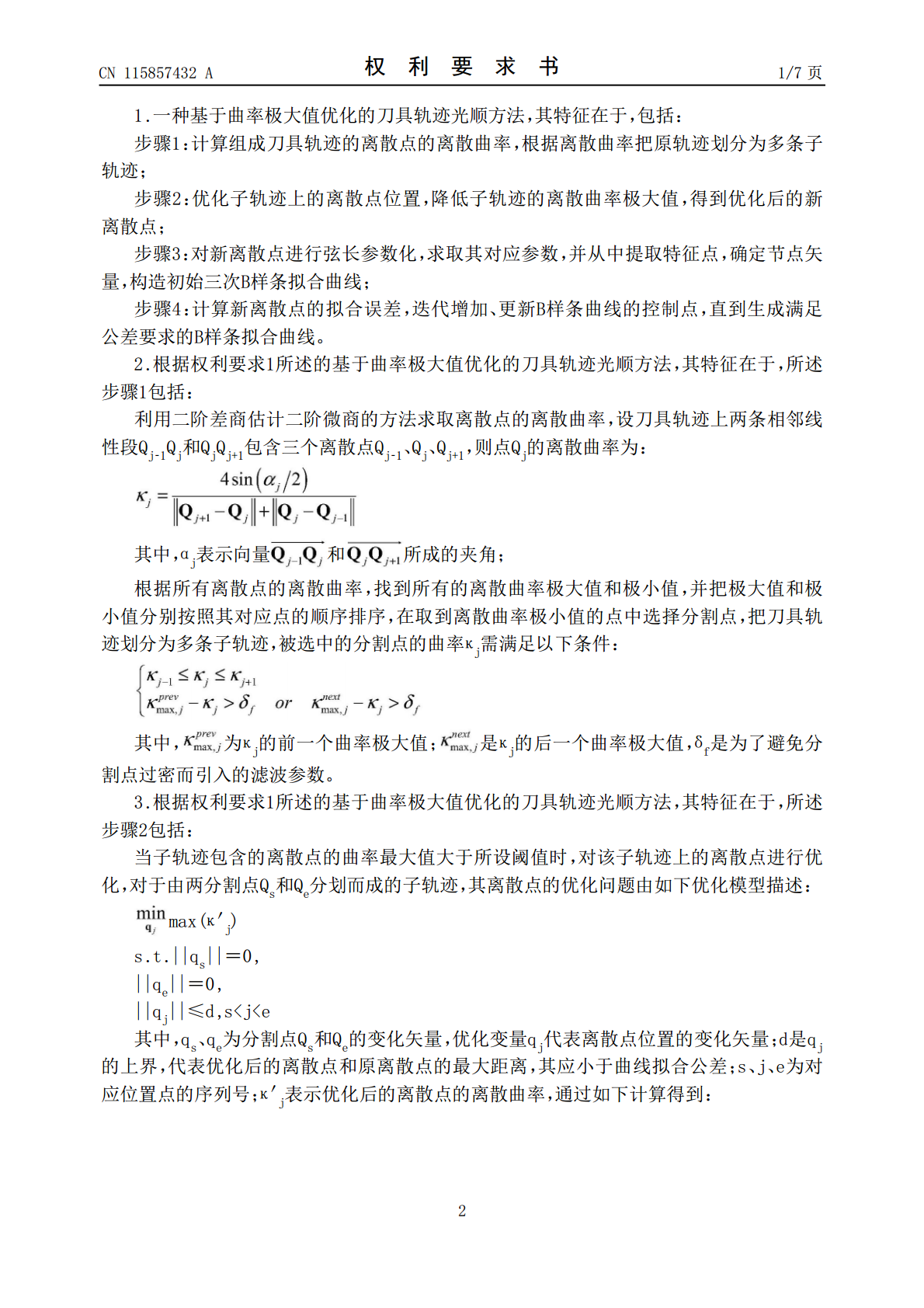
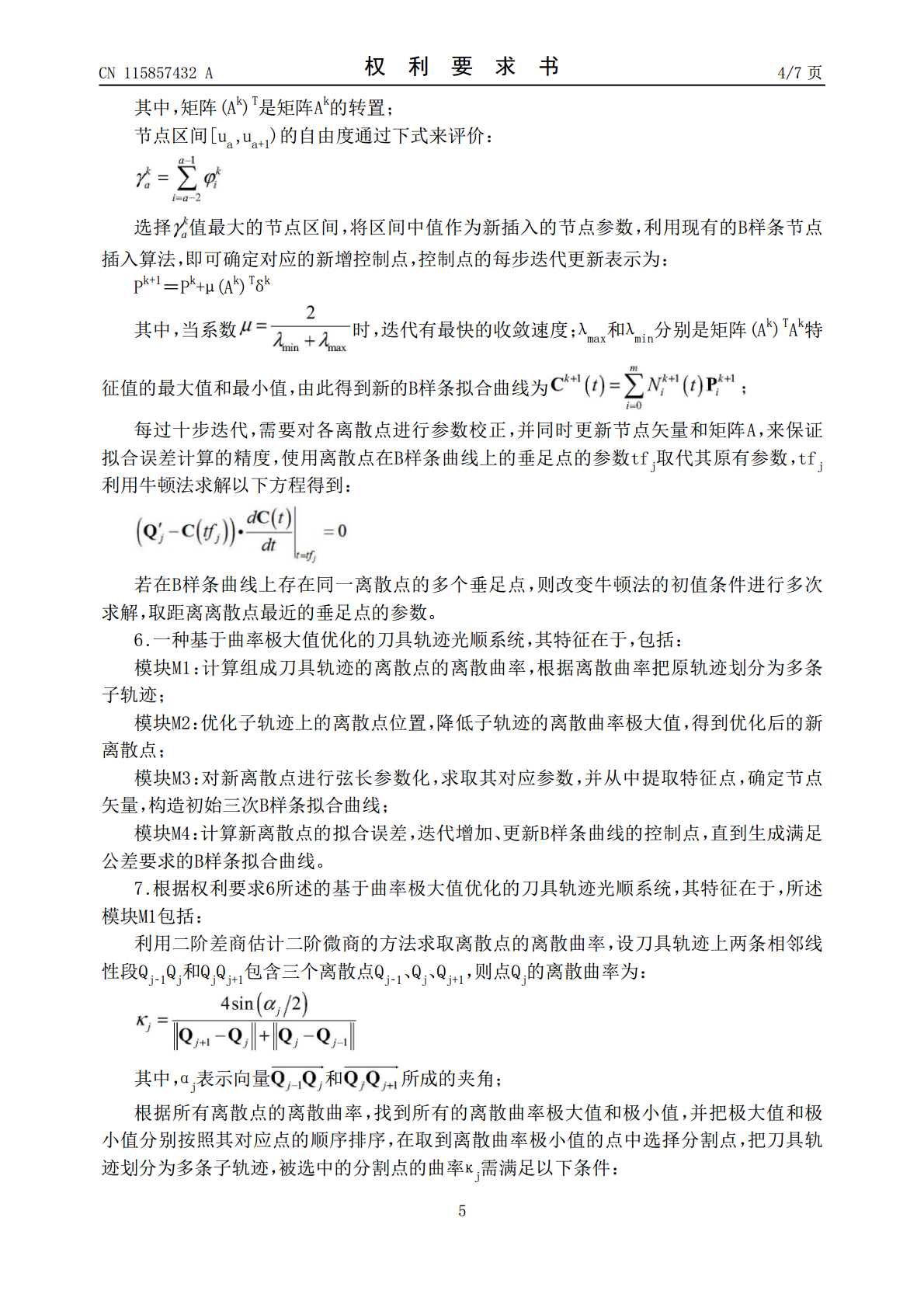
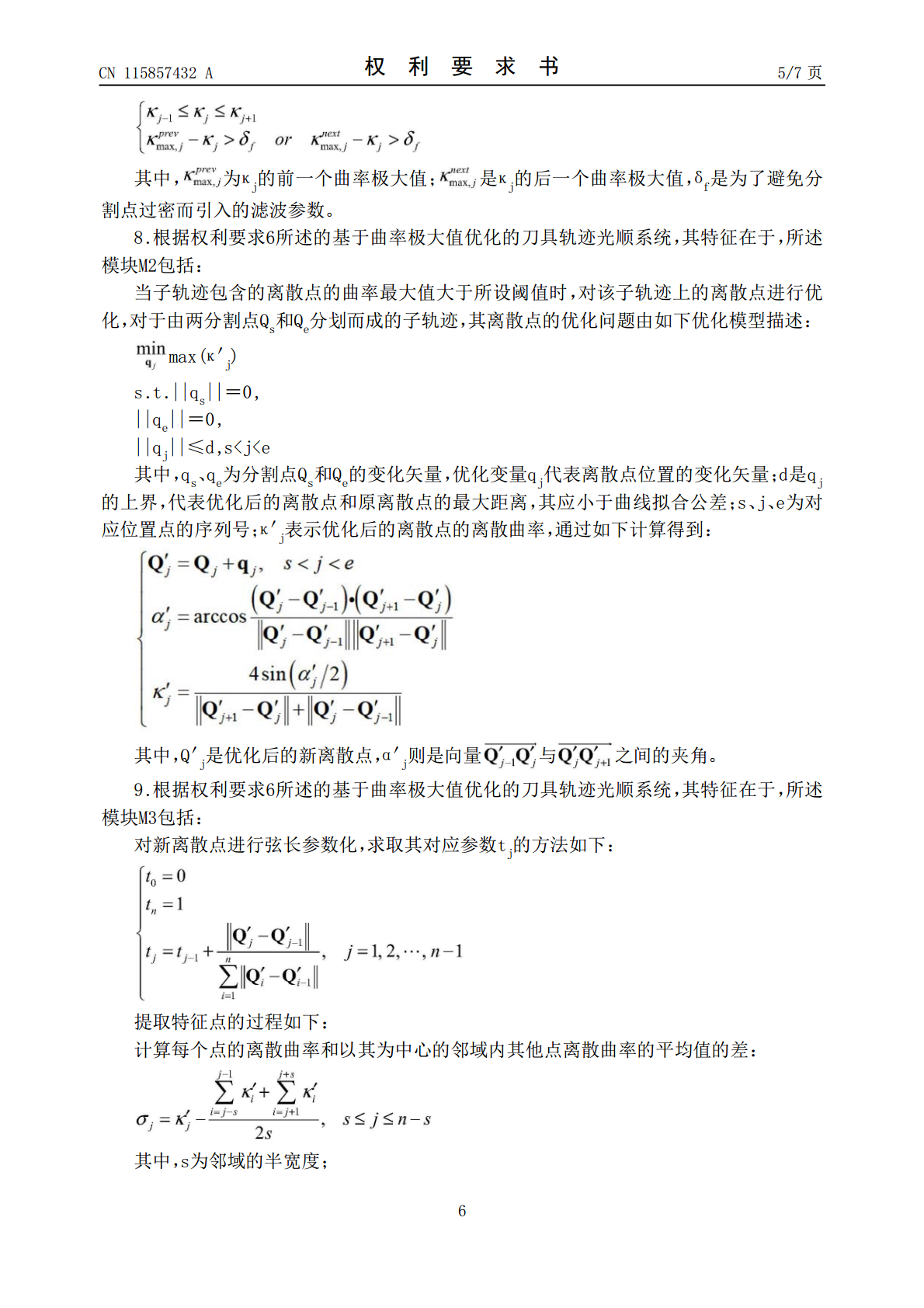
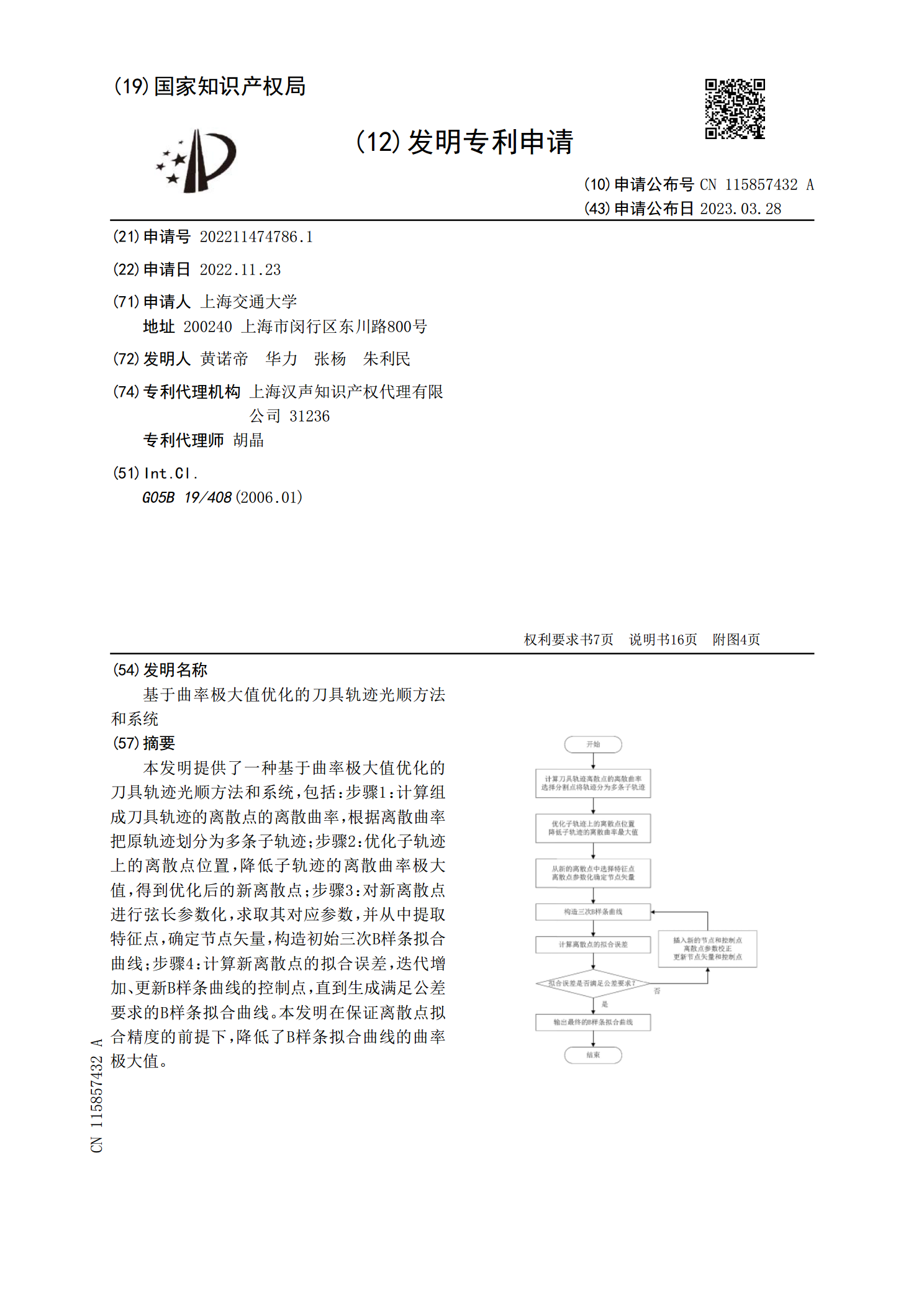
本发明提供了一种基于曲率极大值优化的刀具轨迹光顺方法和系统,包括:步骤1:计算组成刀具轨迹的离散点的离散曲率,根据离散曲率把原轨迹划分为多条子轨迹;步骤2:优化子轨迹上的离散点位置,降低子轨迹的离散曲率极大值,得到优化后的新离散点;步骤3:对新离散点进行弦长参数化,求取其对应参数,并从中提取特征点,确定节点矢量,构造初始三次B样条拟合曲线;步骤4:计算新离散点的拟合误差,迭代增加、更新B样条曲线的控制点,直到生成满足公差要求的B样条拟合曲线。本发明在保证离散点拟合精度的前提下,降低了B样条拟合曲线的曲率极
叶片曲面整体曲率光顺方法.pdf
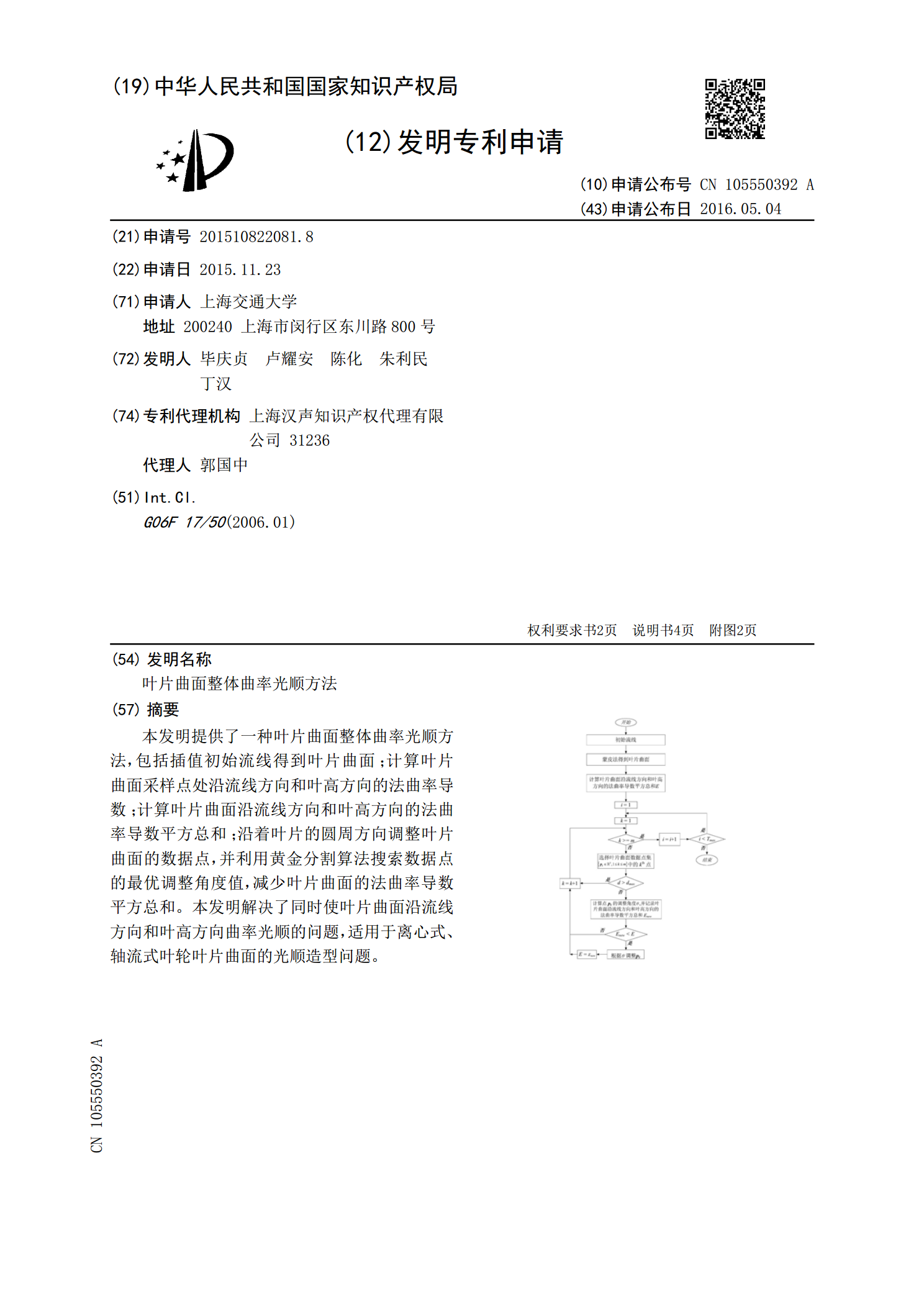
本发明提供了一种叶片曲面整体曲率光顺方法,包括插值初始流线得到叶片曲面;计算叶片曲面采样点处沿流线方向和叶高方向的法曲率导数;计算叶片曲面沿流线方向和叶高方向的法曲率导数平方总和;沿着叶片的圆周方向调整叶片曲面的数据点,并利用黄金分割算法搜索数据点的最优调整角度值,减少叶片曲面的法曲率导数平方总和。本发明解决了同时使叶片曲面沿流线方向和叶高方向曲率光顺的问题,适用于离心式、轴流式叶轮叶片曲面的光顺造型问题。

基于离散曲率的点云光顺算法.docx
基于离散曲率的点云光顺算法基于离散曲率的点云光顺算法摘要:点云是三维场景的离散表示形式,但由于数据采集过程中的噪声和不完整性,点云往往包含了大量的噪声和不平滑的表面。因此,点云光顺是点云后处理的重要方向之一。本论文提出了一种基于离散曲率的点云光顺算法,该算法能够有效地去除噪声并光滑点云表面。实验证明,这种算法能够有效地提高点云的质量,并有助于后续的点云处理任务。1.简介随着3D传感技术的发展,点云数据被广泛应用于三维重建、机器人导航等领域。然而,由于数据采集过程中的噪声和不完整性,大部分点云数据存在高频噪

凸曲率着陆轨迹燃耗优化方法.pdf
本发明公开的凸曲率着陆轨迹燃耗优化方法,属于深空探测技术领域。本发明将优化问题中的指标和约束均处理为符合二阶锥规划问题的形式,使用内点法求解燃耗优化轨迹,具有优化速度快且无局部最优解的优势;将凸优化方法引入凸曲率轨迹设计中,将凸曲率轨迹特性转化为状态矢量的角度约束,通过构造含曲率相关约束的燃耗优化二阶锥规划问题,使着陆轨迹保留凸曲率轨迹在避障和观测方面既有优势的同时,有效兼顾燃料经济性;将曲率约束和轨迹实时优化方法相结合,设计参数化的曲率调节机制,根据着陆区实际地形条件,调节曲率约束序列函数中的可调参数值

基于VERICUT的虚拟数控加工刀具轨迹优化.docx
基于VERICUT的虚拟数控加工刀具轨迹优化随着制造技术的不断发展,虚拟数控加工技术在模拟、验证和优化数控加工过程中已经得到广泛的应用。而基于VERICUT的虚拟数控加工刀具轨迹优化技术依靠虚拟仿真技术可以高效解决计划中的数控程序并优化刀具轨迹,从而有效提高数控加工的精度和效率。一、虚拟刀具轨迹的基本概念虚拟刀具轨迹是指在计算机中通过数学模型进行仿真,模拟实际数控加工时刀具的运动轨迹。这种虚拟的刀具轨迹是由高级计算机辅助设计和刀具轨迹规划软件生成的,通过虚拟仿真等技术进行动态模拟,并通过VERICUT进行