
泵车臂架刚柔耦合模型仿真.docx

是翠****ng


1/4

2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

泵车臂架刚柔耦合模型仿真.docx
泵车臂架刚柔耦合模型仿真《机械工程与自动化杂志》2014年第二期1柔性体理论及创建方法多柔性体系统动力学是研究由可变形物体以及刚体所组成的系统在经历大范围空间运动时的动力学行为[3]。它在多刚体动力学理论基础上不仅考虑了各部件连接点处的阻尼与弹性等的影响又进一步考虑到部件的变形极大地提高了多体系统仿真的准确性。1.1柔性体运动学方程在多柔性体系统动力学分析中系统能量是一个非常重要的物理量。同时在理论计算过程中能量的时间历程能否遵循保守系统能量守恒
泵车臂架刚柔耦合模型仿真.docx
泵车臂架刚柔耦合模型仿真《机械工程与自动化杂志》2014年第二期1柔性体理论及创建方法多柔性体系统动力学是研究由可变形物体以及刚体所组成的系统在经历大范围空间运动时的动力学行为[3]。它在多刚体动力学理论基础上不仅考虑了各部件连接点处的阻尼与弹性等的影响又进一步考虑到部件的变形极大地提高了多体系统仿真的准确性。1.1柔性体运动学方程在多柔性体系统动力学分析中系统能量是一个非常重要的物理量。同时在理论计算过程中能量的时间历程能否遵循保守系统能量守恒
备用臂架、臂架装置和泵车.pdf
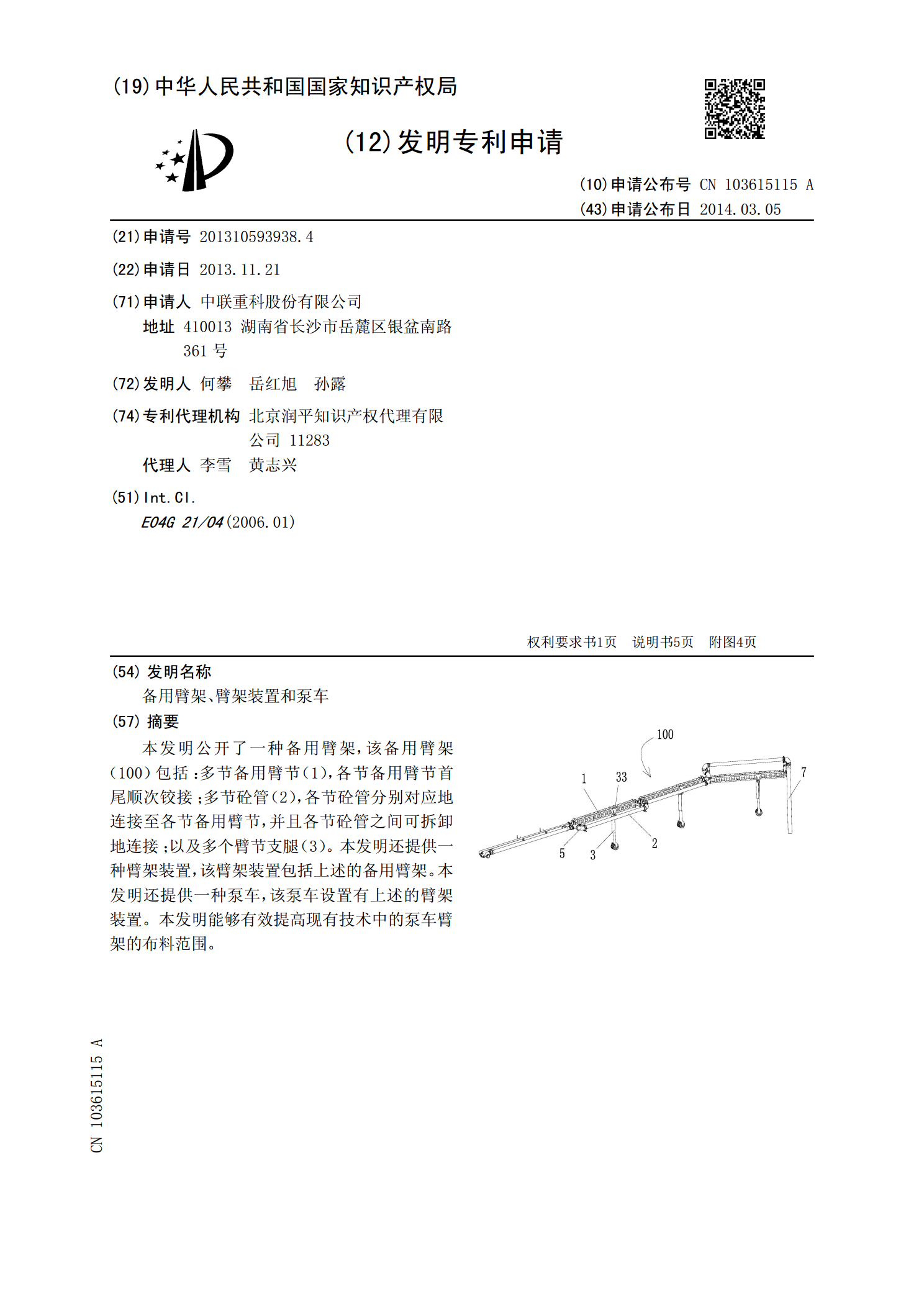
本发明公开了一种备用臂架,该备用臂架(100)包括:多节备用臂节(1),各节备用臂节首尾顺次铰接;多节砼管(2),各节砼管分别对应地连接至各节备用臂节,并且各节砼管之间可拆卸地连接;以及多个臂节支腿(3)。本发明还提供一种臂架装置,该臂架装置包括上述的备用臂架。本发明还提供一种泵车,该泵车设置有上述的臂架装置。本发明能够有效提高现有技术中的泵车臂架的布料范围。

一种臂架结构、臂架装置及混凝土泵车.pdf
本发明提供了一种臂架结构,其包括通过转轴连接的第一臂段和第二臂段,转轴与该臂架结构端部的铰接轴线垂直设置,驱动装置和第一传动轮安装于第一臂段,第二传动轮可转动地安装于转轴,第二臂段与第二传动轮固定连接,在第一传动轮和第二传动轮上安装有传动机构,驱动装置驱动第一传动轮转动,第一传动轮通过传动机构带动第二传动轮及第二臂段绕转轴转动。本发明还提供了一种臂架装置及一种混凝土泵车。通过本发明提供的技术方案,实现了臂架水平转动的功能,增加了布料的灵活性。

基于ANSYS-ADAMS的刚柔耦合仿真.docx
基于ANSYS-ADAMS的刚柔耦合仿真在前面某篇博文中我在ANSYSWORKBENCH内部做了一个刚柔耦合仿真以后有朋友希望知道如何用ANSYS和ADAMS来做联合仿真。我这里做了双曲柄机构如下图。上图中连杆是柔性体是从ANSYS经典界面中生成的。而两个曲柄都是在ADAMS中生成的。下面说明主要的步骤。1.创建连杆的几何模型。(三维实体ANSYS经典界面下同)2.添加两种单元类型。SOLID185为连杆的实体单元BEAM188用于创建蛛网结构。3.添加材料类型。第一种给连杆第二种给蛛网结构的梁。4