
高铁车体定位系统及测量方法.pdf

贤惠****66


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高铁车体定位系统及测量方法.pdf
本发明提供一种高铁车体定位系统,包括:固定位测量单元、机器人末端测量单元、机器人单元、上位机;所述机器人单元包括机器人本体、机器人控制柜、机器人导轨;机器人控制柜连接机器人本体;两条机器人导轨相隔一个距离平行设置,在每条机器人导轨上设有机器人本体;各机器人本体通过机械臂连接一个机器人末端测量单元;在两条机器人导轨内侧,设有两条与机器人导轨平行的车体导轨,用于承载车体;所述固定位测量单元安装在车体停留位置的前侧;固定位测量单元用于定位车体在车体导轨长度方向的位置。本发明还相应提供了一种高铁车体的测量方法。本
一种高铁预制梁定位系统.pdf
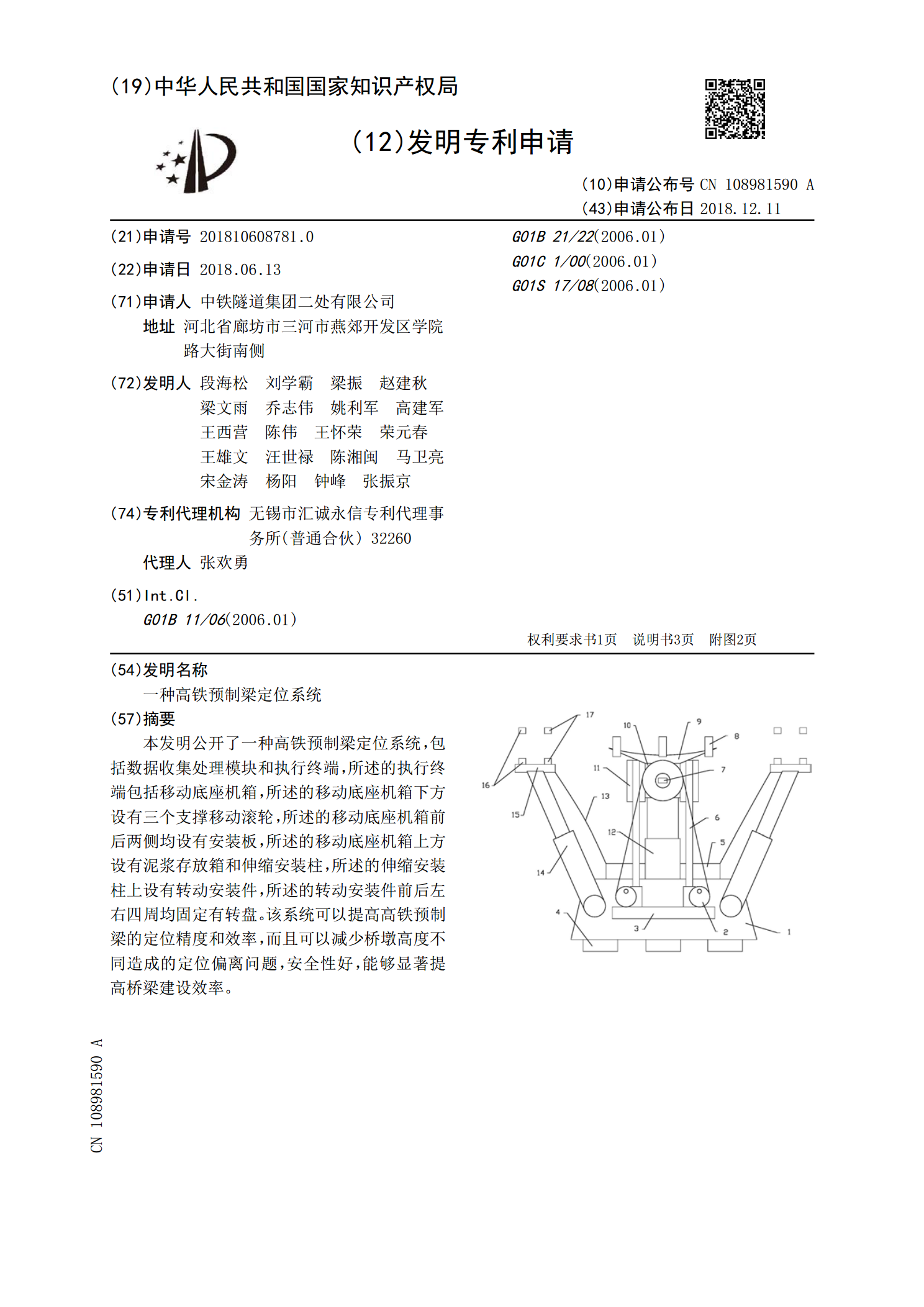
本发明公开了一种高铁预制梁定位系统,包括数据收集处理模块和执行终端,所述的执行终端包括移动底座机箱,所述的移动底座机箱下方设有三个支撑移动滚轮,所述的移动底座机箱前后两侧均设有安装板,所述的移动底座机箱上方设有泥浆存放箱和伸缩安装柱,所述的伸缩安装柱上设有转动安装件,所述的转动安装件前后左右四周均固定有转盘。该系统可以提高高铁预制梁的定位精度和效率,而且可以减少桥墩高度不同造成的定位偏离问题,安全性好,能够显著提高桥梁建设效率。

重粉尘环境移动车体定位系统的设计.docx
重粉尘环境移动车体定位系统的设计重粉尘环境移动车体定位系统的设计摘要:本文针对重粉尘环境下移动车体的定位问题进行研究。由于重粉尘环境对传感器和设备的灰尘污染和磨损严重,传统的定位方法往往无法满足精确定位的需求。因此,本文提出了一种基于激光测距和惯性测量单元的车体定位系统,并对其进行了理论分析和实验验证。实验结果表明,该系统在重粉尘环境下能够实现高精度的车体定位。关键词:重粉尘环境、车体定位、激光测距、惯性测量单元、实验验证。1.引言在某些工业生产场景中,如钢铁冶炼、煤矿开采等行业,存在着大量的重粉尘环境。
公铁车体.pdf
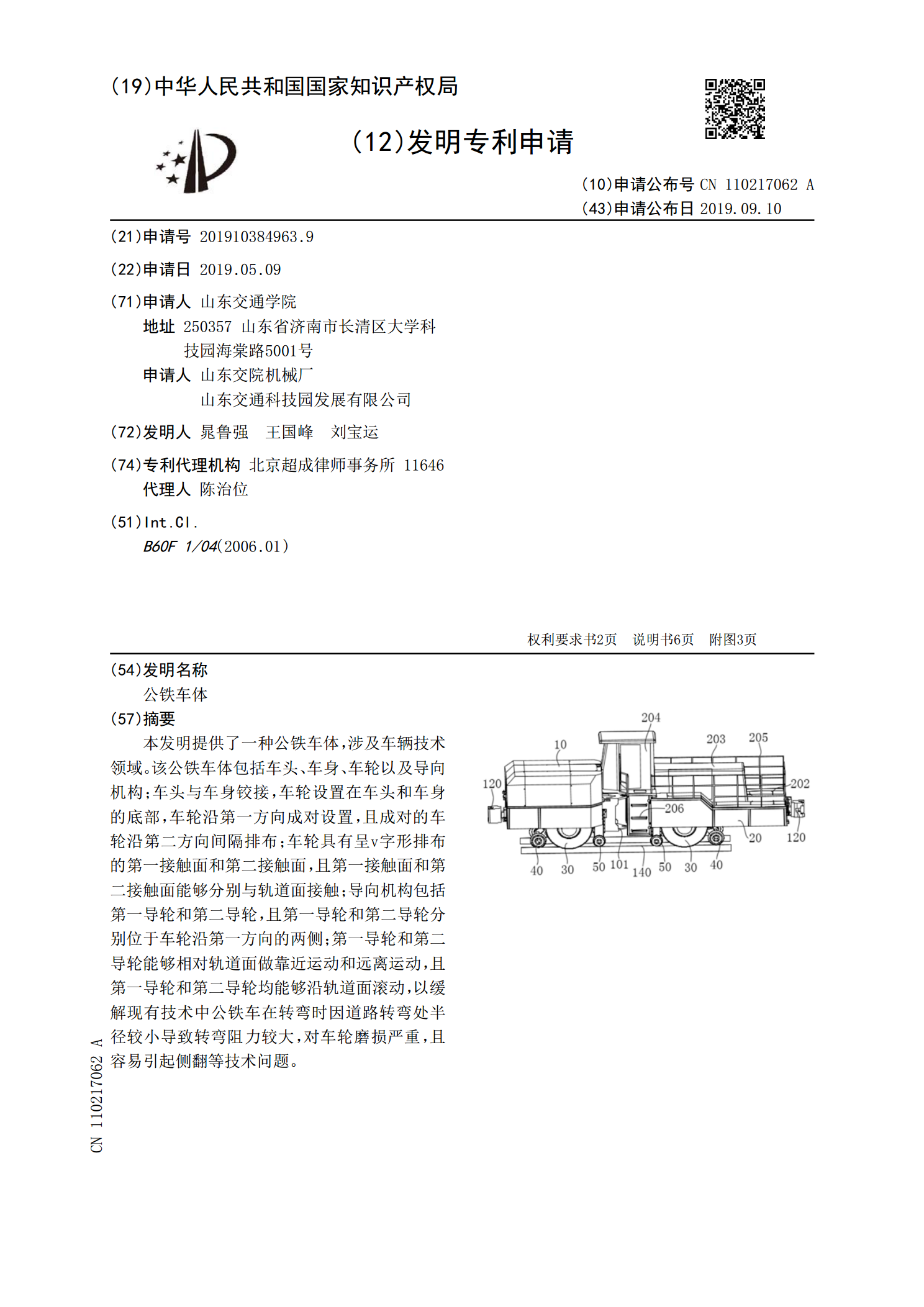
本发明提供了一种公铁车体,涉及车辆技术领域。该公铁车体包括车头、车身、车轮以及导向机构;车头与车身铰接,车轮设置在车头和车身的底部,车轮沿第一方向成对设置,且成对的车轮沿第二方向间隔排布;车轮具有呈v字形排布的第一接触面和第二接触面,且第一接触面和第二接触面能够分别与轨道面接触;导向机构包括第一导轮和第二导轮,且第一导轮和第二导轮分别位于车轮沿第一方向的两侧;第一导轮和第二导轮能够相对轨道面做靠近运动和远离运动,且第一导轮和第二导轮均能够沿轨道面滚动,以缓解现有技术中公铁车在转弯时因道路转弯处半径较小导致
高铁站地区的功能定位思路与方法探析——以京沪高铁济.pdf
第26卷第3期山东建筑大学学报Vo1.26No.32011正6月JOURNALOFSHANDONGJIANZHUUNIVERSITYJune201l文章编号:1673—7644(2011)03—0199—05--.JL_I同Cj铁站地区的功能定位思路与方法探析以京沪高铁济南西客站地区为例尹宏玲(1.山东建筑大学山东省建筑节能技术重点实验室,山东济南250101;2.山东建筑大学可再生能源建筑利用技术教育部重点实验室,山东济南250101)摘要:高铁站地区是城市发展的重要增长极。本文在分析功能定位及其体系的