
一种月面探测器的起飞-着陆-移动实现方法.pdf

书生****35


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种月面探测器的起飞-着陆-移动实现方法.pdf
本发明涉及一种月面探测器的起飞‑着陆‑移动实现方法,属于月面探测器起飞着陆技术领域。将结构板成型过程中预留的毛细空隙作为热控工质的流动管路,实现结构板和热管管材的复用;布置的多个推力器用于提供月面探测器在月面起飞和软着陆过程中的推力,以及飞行过程中的控制,实现推进和控制功能集成设计;将热控多层的间隔层进行立体化设计,提高其保温性能,使探测器能适应更低的环境温度;通过电机的主动控制实现月面探测器可承受多次着陆缓冲的冲击;利用控制电机控制着陆缓冲机构的伸缩和转动,实现月面探测器的移动。

一种室内软着陆月面地形模拟方法.pdf
一种室内软着陆月面地形模拟方法,步骤为:(1)根据待着陆的月面地形障碍分布规律,确定待模拟的月面地形草图及等高线图;(2)选取苯板作为月面地形基础轮廓制作的基础材料,根据任务需求和需要模拟的月面特性确定苯板面积和厚度;(3)根据等高线图对苯板进行加工切割,得到沙盘基础轮廓;(4)在沙盘基础轮廓上整体均匀喷涂石英砂;(5)确定模拟月面不同位置对敏感器的反射特性,并寻找到不同颜色的真石漆分别对应不同反射特性,将相应颜色的真石漆喷涂在石英砂表面,由此得到月面地形模拟沙盘。本发明方法不仅能根据需求精确模拟月面地形
一种月面着陆缓冲装置.pdf
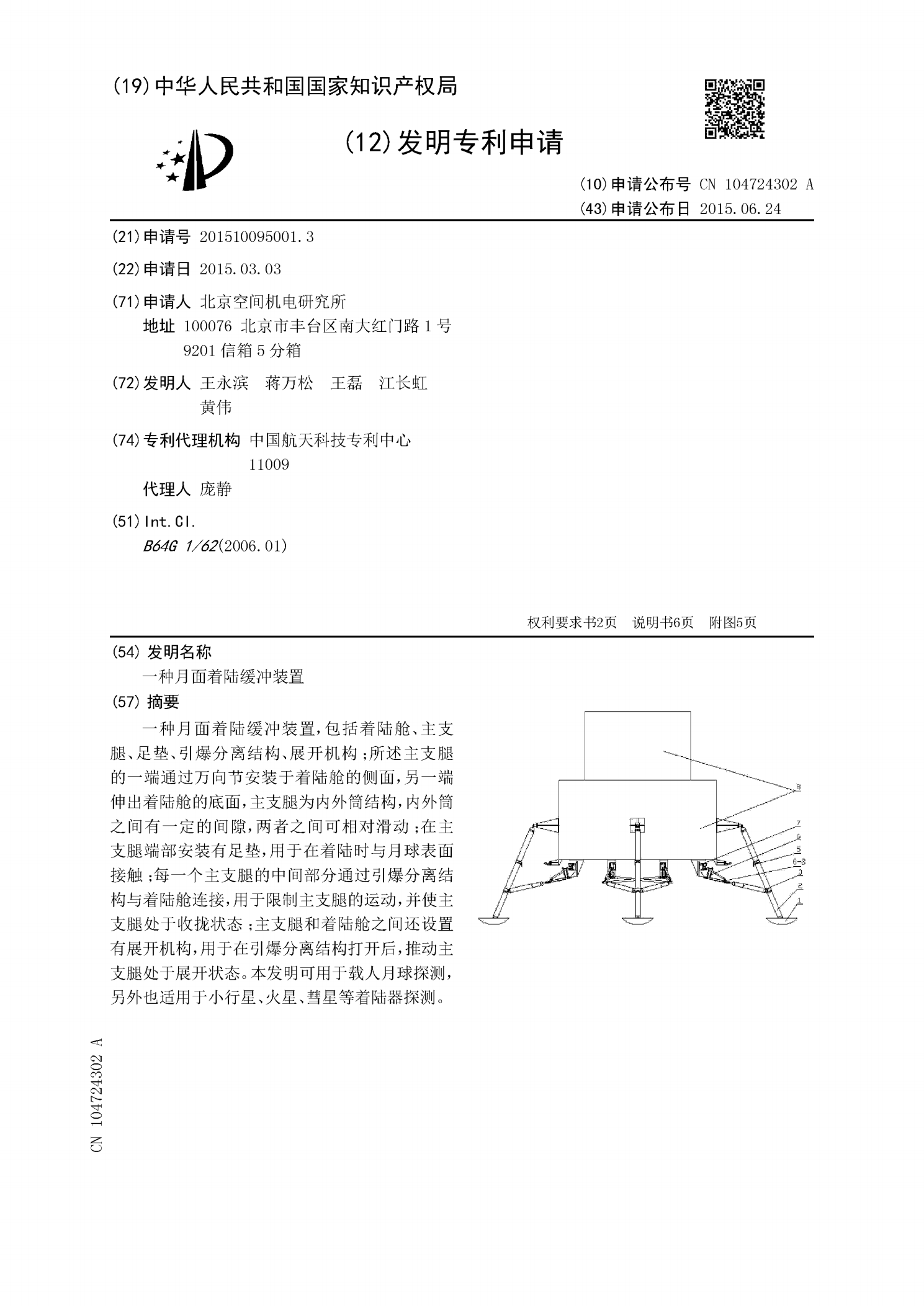
一种月面着陆缓冲装置,包括着陆舱、主支腿、足垫、引爆分离结构、展开机构;所述主支腿的一端通过万向节安装于着陆舱的侧面,另一端伸出着陆舱的底面,主支腿为内外筒结构,内外筒之间有一定的间隙,两者之间可相对滑动;在主支腿端部安装有足垫,用于在着陆时与月球表面接触;每一个主支腿的中间部分通过引爆分离结构与着陆舱连接,用于限制主支腿的运动,并使主支腿处于收拢状态;主支腿和着陆舱之间还设置有展开机构,用于在引爆分离结构打开后,推动主支腿处于展开状态。本发明可用于载人月球探测,另外也适用于小行星、火星、彗星等着陆器探测

使系留飞机着陆的方法以及起飞和着陆系统.pdf
本发明涉及一种着陆系留飞机(90)的方法,包括以下步骤:‑用所述飞机接近地面站点,从而缩短飞机和地面站点之间的系绳(92)的自由长度,直到系绳的所述自由长度达到预定值,‑用所述飞机进一步接近地面站点,从而将系绳的自由长度保持固定在所述预定值,‑保持系绳以形成环,其中环由移动的飞机张紧和收紧,以及‑阻尼所述环的所述收紧,以使飞机减速直至其停在地面站点。本发明还涉及一种用于系留飞机的起飞和着陆系统(1),包括用于飞机的跑道(12)、用于系绳的绞盘(62)以及用于在绞盘和接近跑道的飞机之间形成系绳的环的保持系统

起飞着陆题.ppt
第七章题库143.风与跑道的夹角为60度,风速为30Kt,根据图4-2知,飞机起飞时的逆风为Kt,正侧风为Kt。A.15,25B.15,26C.30,26144.飞机在下面条件下起飞:温度10℃(50℉),气压高度0,重量2700lbs,静风。根据图4-3,飞机到达50ft高度的起飞距离为550ft650ft750ft145.飞机在下面条件下起飞:温度38℃(100℉),气压高度4000ft,重量3200lbs,静风。根据图4-3,飞机起飞滑跑距离为A.1180ftB.1350ftC.1850ft146.