
改进的图像匹配与误匹配剔除算法.pdf

海昌****姐淑


1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

改进的图像匹配与误匹配剔除算法.pdf
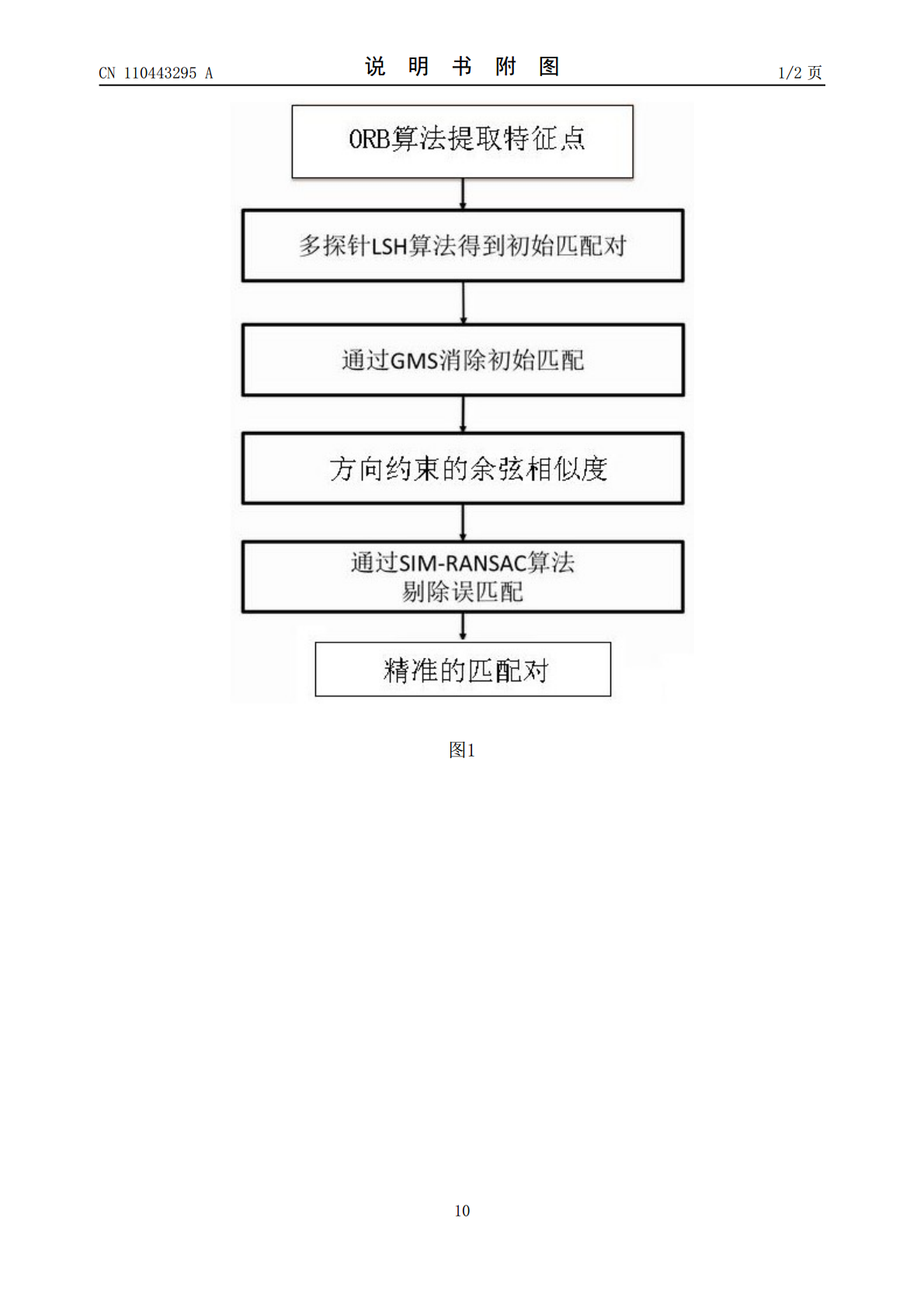
本发明公开了一种改进的图像匹配与误匹配剔除算法,本算法采用FAST算法通过灰度值的差异从图像中提取特征点;利用图像块的二阶矩通过图像块的质心位置及几何中心给定特征点方向;对围绕特征点的像素点进行灰度值比较,采用BRIEF算法创建特征点的描述符;对描述符采用多探针局部敏感散列LSH算法匹配特征点的特征向量,得到特征向量的初始匹配对;依次使用GMS算法、余弦相似度算法和RANSAC算法剔除初始匹配对中的误匹配,得到精准的图像匹配结果。本算法通过改进的ORB算法特征点提取与匹配,结合GMS算法得到效果更好的粗略

RANSAC算法在剔除图像配准中误匹配点的应用.docx
RANSAC算法在剔除图像配准中误匹配点的应用RANSAC算法在图像匹配中是一种非常有效的方法,它可以帮助我们剔除误匹配点,提高图像配准的精确度。在本文中,我们将讨论RANSAC算法的原理、应用以及优缺点,并且将其应用于图像配准中。一、RANSAC算法的原理RANSAC全称为RandomSampleConsensus(随机抽样一致性),是一种通过随机化方法进行模型估计的算法。它的核心思想是从数据集中随机选择一组数据样本,通过这些样本来拟合模型,然后将这个拟合好的模型与其他数据点进行比较,将符合模型的数据点

基于SIFT算法改进的图像匹配算法.docx
基于SIFT算法改进的图像匹配算法随着图像处理技术的不断发展,图像匹配在计算机视觉中扮演着重要的角色。SIFT(Scale-InvariantFeatureTransform)算法是一种经典的图像匹配算法,其具有对旋转、尺度和光照变化具有很好的不变性。本文将针对SIFT算法的局限性,进行改进,提高其在图像匹配中的性能。首先,介绍一下SIFT算法的基本原理。SIFT算法提取了一组具有尺度和旋转不变性的局部特征,用于描述图像的局部细节,包括角点、边缘等。SIFT算法首先采用高斯差分金字塔来检测图像中的关键点,

基于改进的ORB算法的图像匹配算法.pdf
本发明公开了一种基于改进的ORB算法的图像匹配算法,本方法通过AGAST算法对目标图像和对比图像产生一组搜索树,执行后向归纳算法得到平面区域决策树和复杂区域决策树;通过比对决策树内像素点特征得到特征点;确定特征点主方向并使主方向旋转到0度;采用BRIEF算法对特征点构建特征向量;采用多探针局部敏感哈希算法将特征向量映射到不同的哈希桶中,并按探测序列比对不同哈希桶中的特征向量,得到初始匹配对;调用RANSAC算法函数对初始匹配对进行误匹配剔除,得到精准的图像匹配结果。本算法通过对特征点提取和匹配,得到粗略匹

基于改进SURF的图像匹配算法.docx
基于改进SURF的图像匹配算法一、背景介绍图像匹配是计算机视觉中的基础内容之一,其涉及到许多应用领域,如物体识别、三维重建等。目前,在图像匹配领域使用最多的特征描述算法是SIFT(Scale-InvariantFeatureTransform)和SURF(Speed-UpRobustFeature),该算法具有旋转、尺度不变性且具有很高的鲁棒性和效率。然而,SURF算法在一些特定场景中还存在一些不足,如图像中存在大量重复图案、同一个物体中存在多个SURF特征点等问题,这些问题会影响到匹配的精确性和效率。因