
限位装置及限位系统.pdf

是你****盟主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

限位装置及限位系统.pdf
本发明提供了一种限位装置及限位系统,包括:与运动台的动子或定子固定连接的限位框,与运动台的定子或动子固定连接的中空的限位柱中心杆,所述限位柱中心杆的端部通过套设的缓冲件安装在所述限位框内,所述缓冲件与限位框之间留有间隙,以及安装在所述限位柱中心杆内的传感器,所述传感器与所述限位柱中心杆的内壁之间非接触;限位装置系统,包括多个限位装置。在本发明提供的限位装置及限位系统中,能有效减小运动台边界的极限偏移量;且能避免运动台在极限位置时电机仍在发力,造成结构损坏或电机烧毁。

限位装置.pdf
本申请公开了一种限位装置。该限位装置应用于中转场中,包括相对设置的第一侧限位件和第二侧限位件、与第一侧限位件和第二侧限位件连接的支撑架,及至少一个斜坡限位件。第一侧限位件、第二侧限位件和支撑架围成一限位区;限位区用于容纳运输车;斜坡限位件包括位于限位区中的第一斜坡件;第一斜坡件用于支撑运输车,使运输车在自身重力的作用下抵靠于支撑架上。本申请的限位装置可以设置在中转场的指定位置上,将运输车运输至限位装置中,通过限位装置可以有效限制运输车的位置,从而使运输车的位置摆放有序,进而提高中转场的空间利用率。
限位装置.pdf
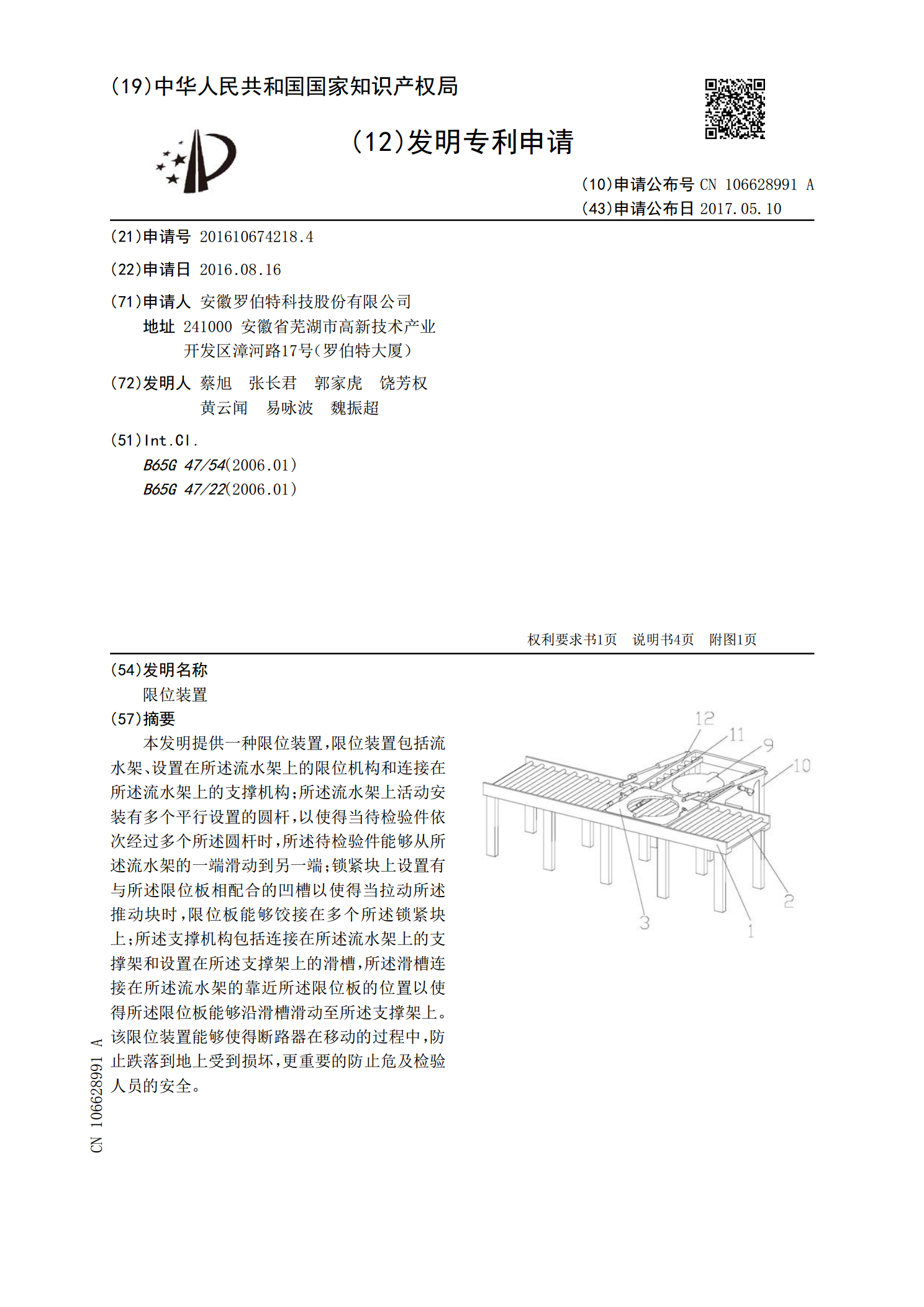
本发明提供一种限位装置,限位装置包括流水架、设置在所述流水架上的限位机构和连接在所述流水架上的支撑机构;所述流水架上活动安装有多个平行设置的圆杆,以使得当待检验件依次经过多个所述圆杆时,所述待检验件能够从所述流水架的一端滑动到另一端;锁紧块上设置有与所述限位板相配合的凹槽以使得当拉动所述推动块时,限位板能够饺接在多个所述锁紧块上;所述支撑机构包括连接在所述流水架上的支撑架和设置在所述支撑架上的滑槽,所述滑槽连接在所述流水架的靠近所述限位板的位置以使得所述限位板能够沿滑槽滑动至所述支撑架上。该限位装置能够使

限位装置.pdf
本发明提供一种限位装置,所述限位装置包括流水架、设置在所述流水架上的限位机构和连接在所述流水架上的支撑机构;以使得当待检验件依次经过多个所述圆杆时,所述支撑架上还饺接有两个拉杆,所述拉杆的长度设置为可伸缩,所述拉杆的伸缩方向和所述滑槽所在长度方向上的直线相平行,且所述拉杆远离所述支撑架的一端还设置有夹持口,所述限位板上设置有与所述夹持口相配合的凸口以使得当所述拉杆夹持住所述限位板时,所述限位板能够跟随所述拉杆沿所述滑槽滑动。该限位装置能够使得断路器在移动的过程中,防止跌落到地上受到损坏,更重要的防止危及检
限位装置.pdf
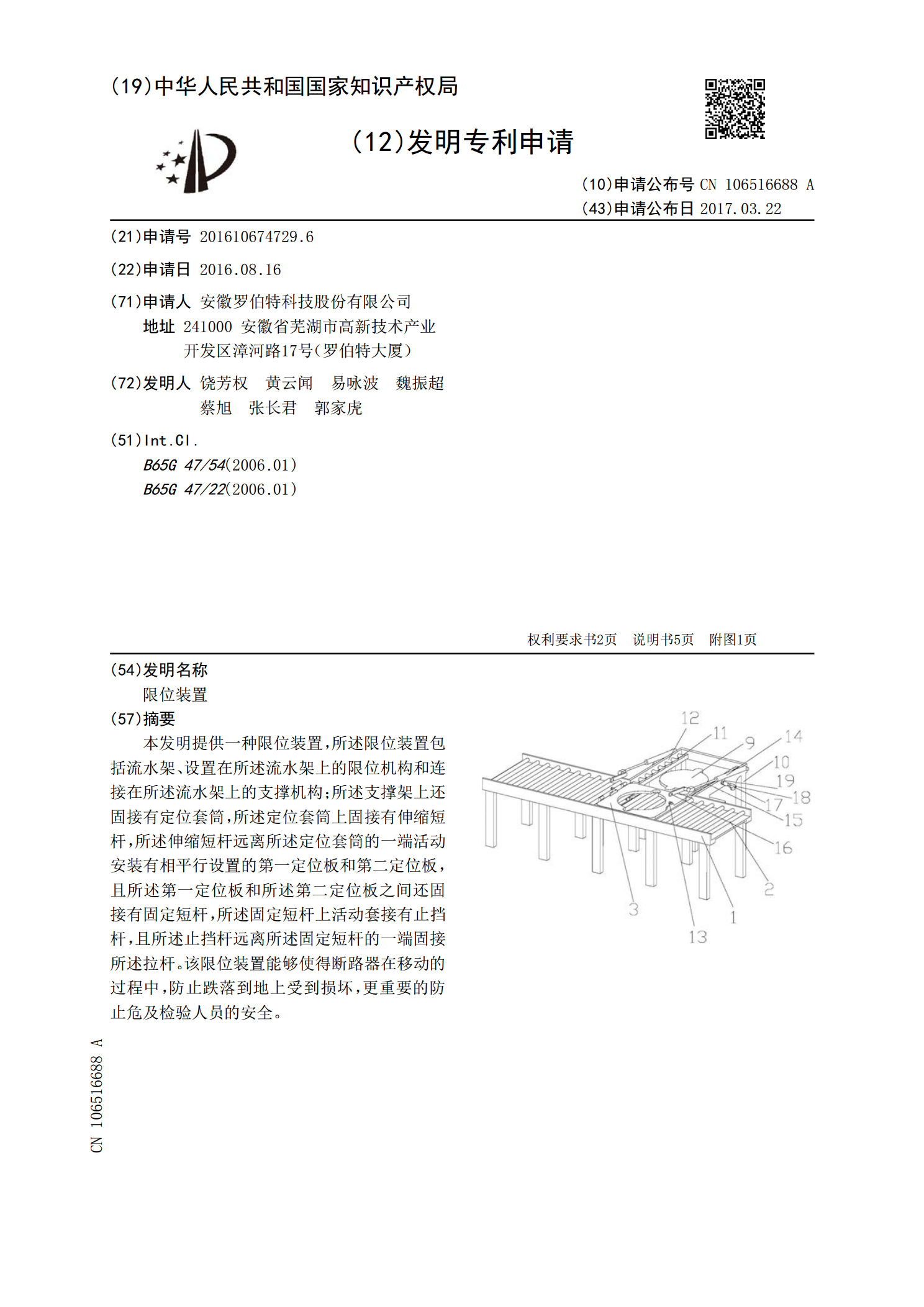
本发明提供一种限位装置,所述限位装置包括流水架、设置在所述流水架上的限位机构和连接在所述流水架上的支撑机构;所述支撑架上还固接有定位套筒,所述定位套筒上固接有伸缩短杆,所述伸缩短杆远离所述定位套筒的一端活动安装有相平行设置的第一定位板和第二定位板,且所述第一定位板和所述第二定位板之间还固接有固定短杆,所述固定短杆上活动套接有止挡杆,且所述止挡杆远离所述固定短杆的一端固接所述拉杆。该限位装置能够使得断路器在移动的过程中,防止跌落到地上受到损坏,更重要的防止危及检验人员的安全。