
一种定位系统及定位方法.pdf

St****36


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种定位方法、定位设备及定位系统.pdf
本发明实施例提供一种定位方法、终端设备及网络设备,应用于通信技术领域,本发明实施例包括:接收定位指示,定位指示用于指示定位第一物品,第一物品设有第一电子标签;获取多个第二电子标签的接收信号强度RSSI,多个第二电子标签中包括第一电子标签;根据多个第二电子标签的RSSI,确定至少一个第三电子标签;通过至少一个第三电子标签,定位第一物品。

一种定位系统及定位方法.pdf
本发明涉及无人机定位技术领域,具体而言,涉及一种定位系统及定位方法。一种定位系统,其包括控制器、系留绳缆、第一力传感模块及第二力传感模块。系留绳缆包括与无人机连接的自由端以及用于设置在地面的地面端。第一力传感模块及第二力传感模块分别设置在地面端及自由端,第一力传感模块用于检测地面端的张力大小及张力方向,第二力传感模块用于检测自由端的拉力大小及拉力方向。控制器与第一力传感模块及第二力传感模块电连接;控制器用于接收第一力传感模块输出的张力大小信号及张力方向信号,以及用于接收第二力传感模块输出的拉力大小信号及拉
一种眼镜定位系统及定位方法.pdf
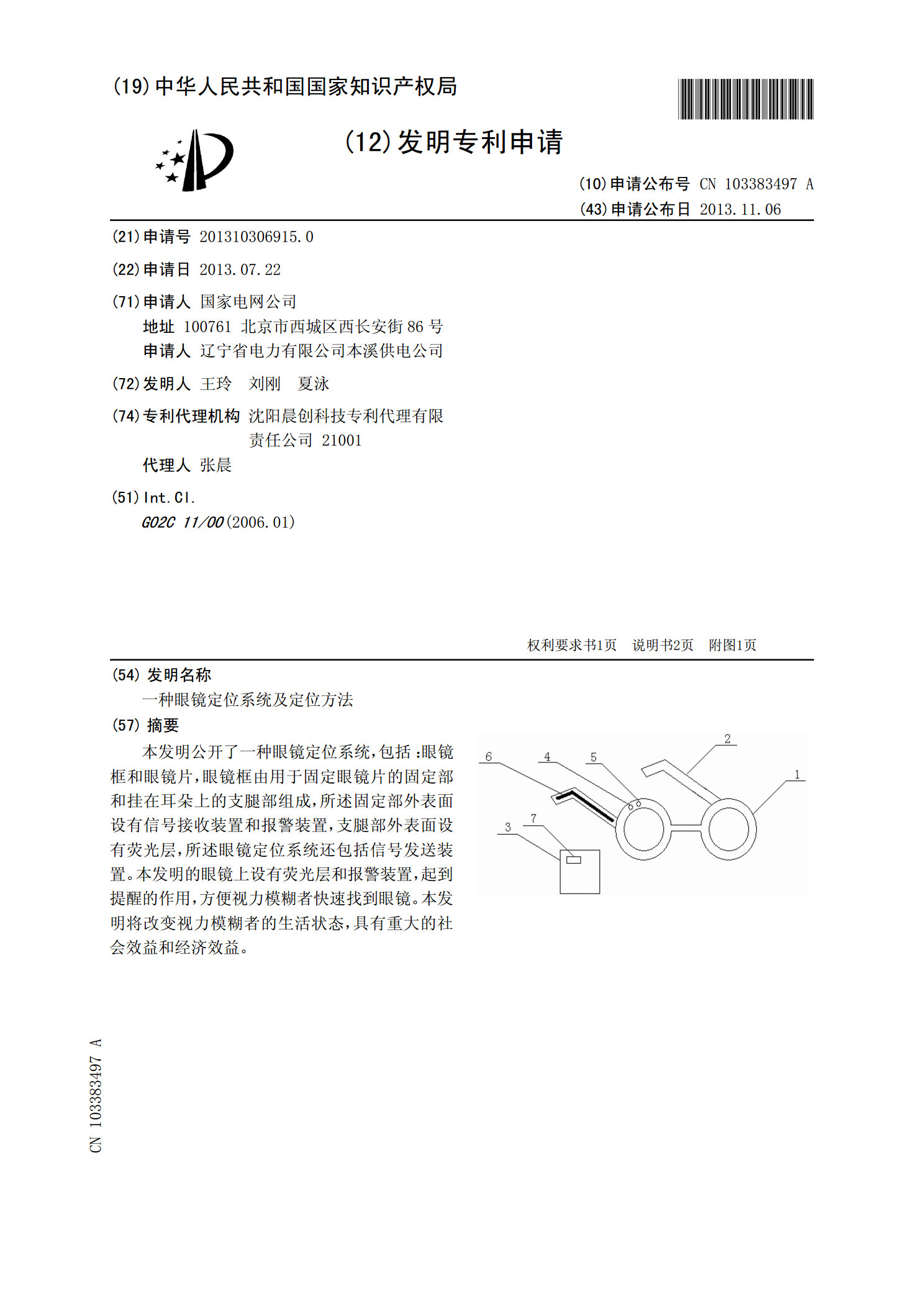
本发明公开了一种眼镜定位系统,包括:眼镜框和眼镜片,眼镜框由用于固定眼镜片的固定部和挂在耳朵上的支腿部组成,所述固定部外表面设有信号接收装置和报警装置,支腿部外表面设有荧光层,所述眼镜定位系统还包括信号发送装置。本发明的眼镜上设有荧光层和报警装置,起到提醒的作用,方便视力模糊者快速找到眼镜。本发明将改变视力模糊者的生活状态,具有重大的社会效益和经济效益。

一种动力总成定位系统及定位方法.pdf
本发明属于一种定位系统,具体涉及一种动力总成定位系统及定位方法,包括安装在车体上的发动机、动力总成变速箱、变速箱支架,发动机的自由端上连接有过渡支架,过渡支架上开有定位孔,车体上设有定位附座,定位附座与过渡支架上的定位孔相配合,所述定位附座与定位孔连接处为锥形结构;发动机左右两端的飞轮壳处连接有后悬置,左右两端的后悬置分别设置在后悬置左上支架和后悬置右上支架的上端并固定在后附座上;动力总成变速箱安装在变速箱支架的上端,变速箱支架的底端与传动附座连接,变速箱支架的底端与传动附座之间还设有辅助悬置。该定位系统

一种曲面玻璃定位系统及定位方法.pdf
本发明涉及一种曲面玻璃定位系统及定位方法,定位系统设置在玻璃成型工位处;包括:用于将加热炉输出的热玻璃输送至成型工位的输送装置;用于在定位过程中托举热玻璃的支撑装置;若干个用于热玻璃端部定位的端部定位装置;若干个用于对热玻璃侧边定位的边部定位装置。本发明通过使用气缸或液压缸驱动的耐高温定位头对热玻璃的端部和侧边的位置进行精确调整、定位,使玻璃能够与模具之间的位置偏差降到最低,并在定位过程中使用支撑件对玻璃进行托举,有效避免由于加热后玻璃变软导致的局部下沉所造成的定位不准等问题。