
基于交替方向乘子法的鲁棒自适应波束形成算法.pdf

诗文****仙女


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于交替方向乘子法的鲁棒自适应波束形成算法.pdf
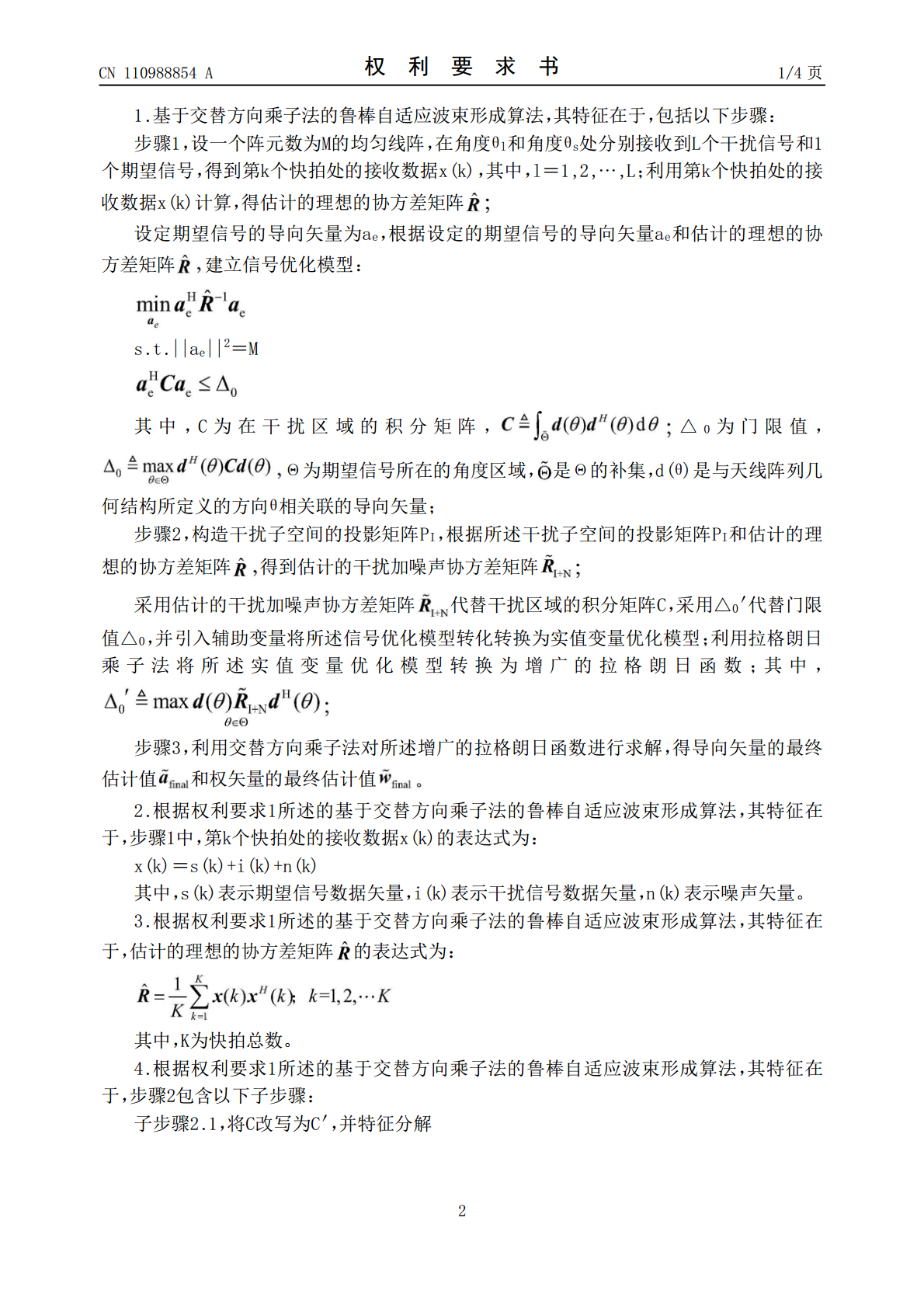
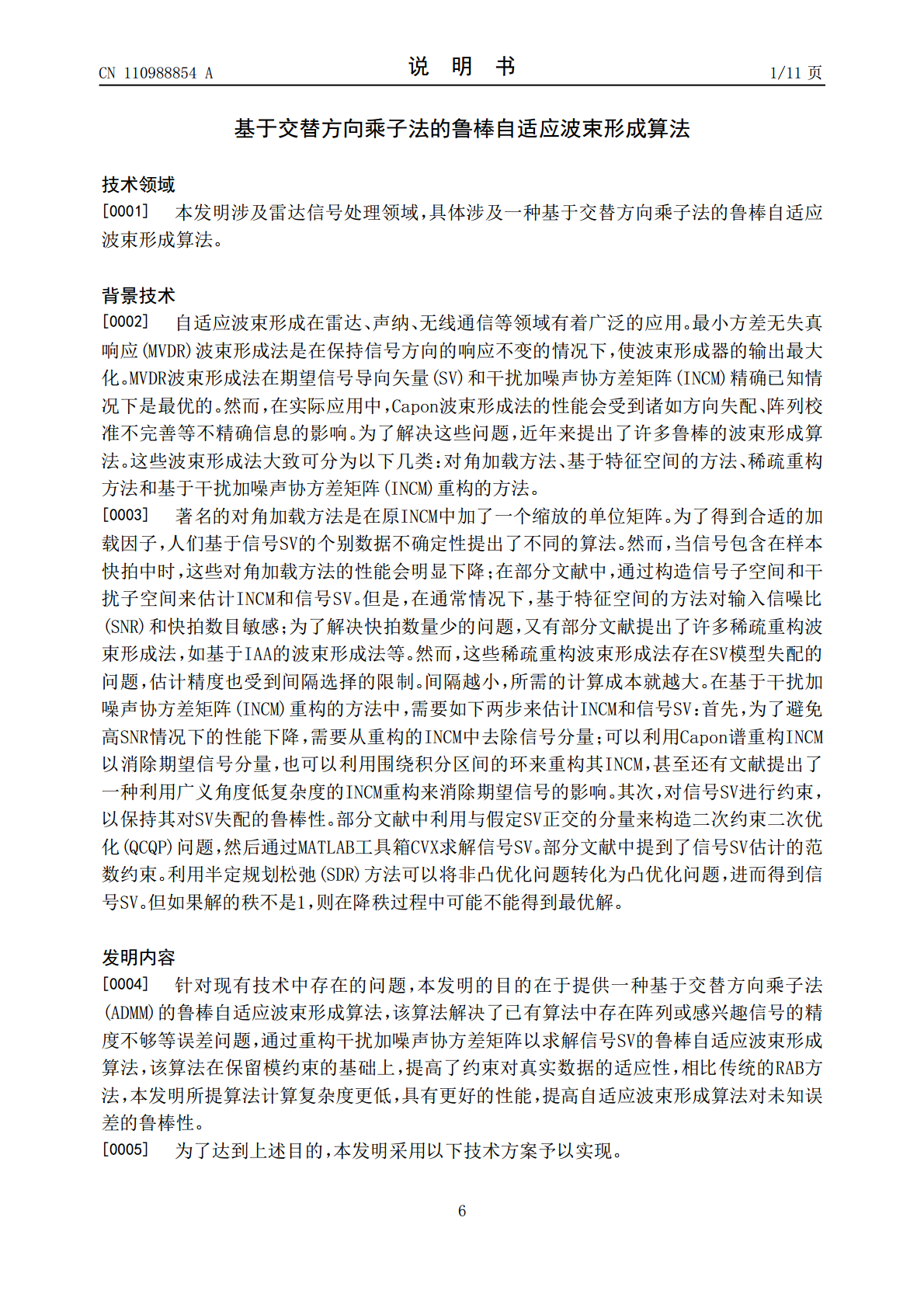
本发明属于雷达信号处理领域,公开了一种基于交替方向乘子法的鲁棒自适应波束形成算法,该算法解决了已有算法中存在阵列或感兴趣信号的精度不够等误差问题,通过重构干扰加噪声协方差矩阵以求解信号SV的鲁棒自适应波束形成算法,该算法在保留模约束的基础上,提高了约束对真实数据的适应性,相比传统的RAB方法,本发明所提算法计算复杂度更低,具有更好的性能,提高自适应波束形成算法对未知误差的鲁棒性。

基于交替方向乘子法的非光滑损失坐标优化算法.docx
基于交替方向乘子法的非光滑损失坐标优化算法文章编号:10019081(2013)07191205doi:10.11772/j.issn.10019081.2013.07.1912摘要:交替方向乘子法(ADMM)在机器学习问题中已有一些实际应用。针对大规模数据的处理和非光滑损失凸优化问题将镜面下降方法引入原ADMM批处理算法得到了一种新的改进算法并在此基础上提出了一种求解非光滑损失凸优化问题的坐标优化算法。该算法具有操作简单、计算高效的特点。
基于交替方向乘子法的非光滑损失坐标优化算法.docx
基于交替方向乘子法的非光滑损失坐标优化算法文章编号:10019081(2013)07191205doi:10.11772/j.issn.10019081.2013.07.1912摘要:交替方向乘子法(ADMM)在机器学习问题中已有一些实际应用。针对大规模数据的处理和非光滑损失凸优化问题将镜面下降方法引入原ADMM批处理算法得到了一种新的改进算法并在此基础上提出了一种求解非光滑损失凸优化问题的坐标优化算法。该算法具有操作简单、计算高效的特点。
分布式在线交替方向乘子法.docx
分布式在线交替方向乘子法摘要:针对如何对分布式网络采集的数据进行在线学习的问题提出了一种基于交替方向乘子法(ADMM)的分布式在线学习优化算法――分布式在线交替方向乘子法(DOM)。首先针对分布式在线学习需要各节点根据新采集的数据来更新本地估计同时保持网络中所有节点的估计趋于一致这一问题建立了数学模型并设计DOM算法对其进行求解。其次针对分布式在线学习问题定义了Regret界用以表征在线估计的性能;证明了当本地即时损失函数是凸函数时DOM算法是收敛的并给出了其收敛速度。最后
分布式在线交替方向乘子法.docx
分布式在线交替方向乘子法摘要:针对如何对分布式网络采集的数据进行在线学习的问题提出了一种基于交替方向乘子法(ADMM)的分布式在线学习优化算法――分布式在线交替方向乘子法(DOM)。首先针对分布式在线学习需要各节点根据新采集的数据来更新本地估计同时保持网络中所有节点的估计趋于一致这一问题建立了数学模型并设计DOM算法对其进行求解。其次针对分布式在线学习问题定义了Regret界用以表征在线估计的性能;证明了当本地即时损失函数是凸函数时DOM算法是收敛的并给出了其收敛速度。最后