
一种基于计算机视觉的物体轨迹追踪识别装置及系统.pdf

明钰****甜甜


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于计算机视觉的物体轨迹追踪识别装置.pdf
本发明公开了一种基于计算机视觉的物体轨迹追踪识别装置,涉及视频分析处理技术领域。一种基于计算机视觉的物体轨迹追踪识别装置,包括安装座,安装座内腔的顶部活动连接有旋转柱,旋转柱的表面套设有第一齿轮,安装座内腔顶部的右侧固定连接有第一电机,第一电机输出端的表面套设有第二齿轮,第一齿轮的右侧与第二齿轮啮合,旋转柱的底部贯穿至安装座的底部并固定连接有调节座,调节座底部的左侧活动连接有安装壳,调节座内腔的左侧固定连接有第二电机,第二电机输出端的右侧固定连接有螺纹杆。本发明解决了现有物体轨迹追踪识别装置中监控装置出现

一种基于计算机视觉的物体轨迹追踪识别装置及系统.pdf
本发明属于视频流分析处理技术领域,涉及一种基于计算机视觉的物体轨迹追踪识别装置及系统;所述装置包括视频流接入模块用于获取视频流数据;去异色空间噪声模块用于消除视频流数据帧图像中的无关噪声和杂色像素块;物体检索模块用于设置特定色彩空间区域值检索出待追踪物体的像素块;计算模块用于计算所述待追踪物体的像素块的最小外接圆;轨迹模拟模块在视频流数据中获得以待检测物体最小外接圆确定的中心位置的轨迹;轨迹检测模块根据待检测物体最小外接圆形成的运动轨迹检测是否存在特定图形;轨迹识别模块,根据检测到的特定图形完成识别待追踪
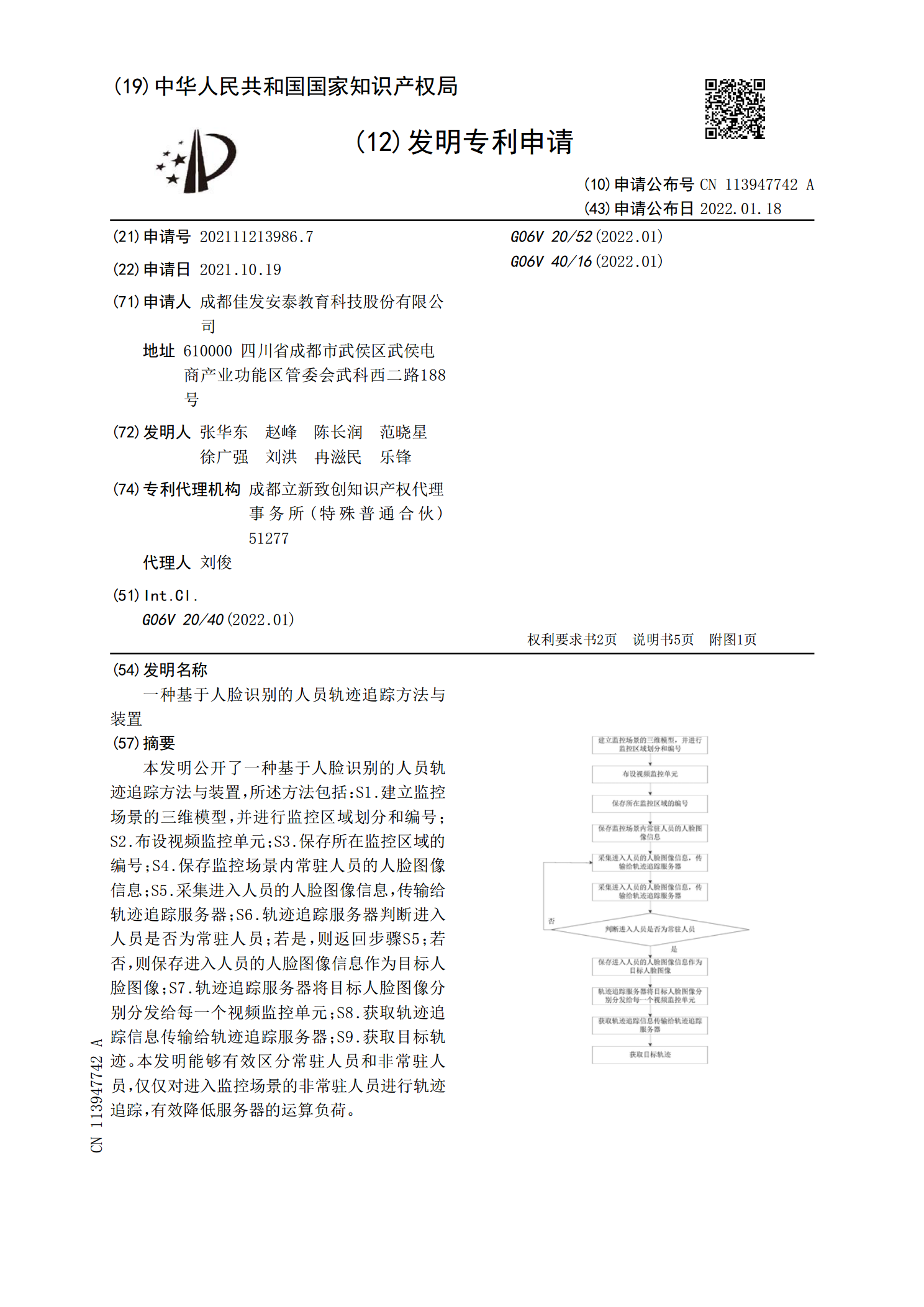
一种基于人脸识别的人员轨迹追踪方法与装置.pdf
本发明公开了一种基于人脸识别的人员轨迹追踪方法与装置,所述方法包括:S1.建立监控场景的三维模型,并进行监控区域划分和编号;S2.布设视频监控单元;S3.保存所在监控区域的编号;S4.保存监控场景内常驻人员的人脸图像信息;S5.采集进入人员的人脸图像信息,传输给轨迹追踪服务器;S6.轨迹追踪服务器判断进入人员是否为常驻人员;若是,则返回步骤S5;若否,则保存进入人员的人脸图像信息作为目标人脸图像;S7.轨迹追踪服务器将目标人脸图像分别分发给每一个视频监控单元;S8.获取轨迹追踪信息传输给轨迹追踪服务器;S
基于双目视觉的动态物体运动轨迹识别方法.pdf
本发明涉及视频跟踪领域,公开了一种基于双目视觉的动态物体运动轨迹识别方法,方法依据的双目视觉系统包括水平平行安装的两个相机和与相机连接的计算机,方法包括以下步骤:采集动态物体的图像数据,并传送至计算机;使用背景差分法处理图像数据取得每帧图像数据中的轮廓;按照动态物体特征进行识别取得动态物体的二维坐标;根据双目视觉匹配计算和三角测量原理取得动态物品的三维坐标;编写运动轨迹捕捉软件取得动态物体的运动轨迹。本发明针对运动速度较快、外形尺寸较小或二维形状特征不明显的物体,采用轮廓过滤算法进行二维特征识别,利用双目

基于机器视觉的物体识别分拣装置研究.docx
基于机器视觉的物体识别分拣装置研究一、引言随着物流行业快速发展,物品的分拣速度和准确率成为了物流企业的重要考量指标。然而,传统的分拣方式往往需要大量的人力和时间,且容易出现误差,效率低下。基于机器视觉的物体识别分拣装置则可以大大提高分拣效率和准确率,使物流行业更具竞争力。二、机器视觉技术原理机器视觉是一种基于计算机视觉技术的智能化系统,它通过高速图像处理、模式识别等算法实现对图像的理解和分析。基于机器视觉的物体识别分拣装置则通过相机对待分拣物品进行拍照,将物品的视觉信息传入计算机,计算机对图像进行处理,最