
一种基于Golay序列互补码字集的运动模糊复原方法.pdf

文光****iu

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于Golay序列互补码字集的运动模糊复原方法.pdf
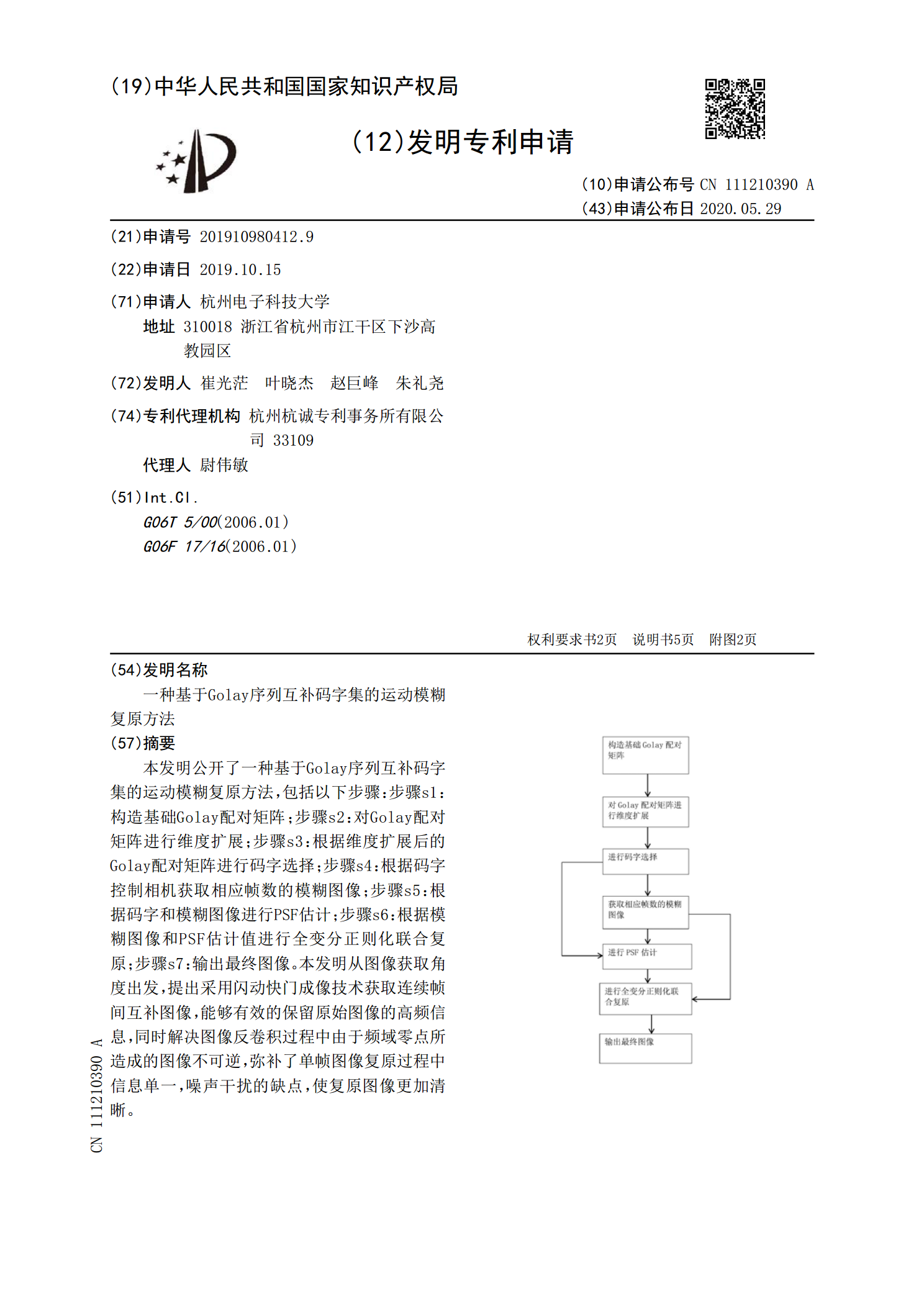
本发明公开了一种基于Golay序列互补码字集的运动模糊复原方法,包括以下步骤:步骤s1:构造基础Golay配对矩阵;步骤s2:对Golay配对矩阵进行维度扩展;步骤s3:根据维度扩展后的Golay配对矩阵进行码字选择;步骤s4:根据码字控制相机获取相应帧数的模糊图像;步骤s5:根据码字和模糊图像进行PSF估计;步骤s6:根据模糊图像和PSF估计值进行全变分正则化联合复原;步骤s7:输出最终图像。本发明从图像获取角度出发,提出采用闪动快门成像技术获取连续帧间互补图像,能够有效的保留原始图像的高频信息,同时解

基于闪动快门的互补序列对的运动模糊图像复原.pptx
汇报人:目录PARTONE互补序列对的定义互补序列对的特性互补序列对在图像复原中的应用PARTTWO运动模糊的分类运动模糊的产生原因运动模糊对图像质量的影响PARTTHREE闪动快门的原理闪动快门的特点闪动快门在图像采集中的应用PARTFOUR互补序列对在复原过程中的作用提高图像复原质量的方法复原算法的实现流程PARTFIVE实验设置与数据采集实验结果展示结果分析算法性能评估PARTSIX研究成果总结对未来研究的建议与展望THANKYOU

基于视频序列的局部运动模糊车辆图像复原算法研究.docx
基于视频序列的局部运动模糊车辆图像复原算法研究一、引言随着车辆保有量的增加,道路交通日益繁忙,车辆行驶过程中会产生各种不利因素,如雾天、夜间、雨雪等自然因素和路面不平、老化、施工等人为因素,使得车辆图像产生模糊,给驾驶员的视觉感受和行驶安全带来一定的影响。因此,车辆图像复原技术在视觉信息处理中具有重要意义。传统的车辆图像复原方法主要依靠图像去模糊和图像增强的技术,但是这些方法提出了复杂的假设,如运动平滑性、数字图像模型等,因此很难提供有效的复原效果。而导致车辆图像模糊的主要原因是局部运动模糊,因此要针对这

一种基于Hough变换的运动模糊图像复原方法.docx
一种基于Hough变换的运动模糊图像复原方法摘要本文提出了一种基于Hough变换的运动模糊图像复原方法。该方法可以采用傅里叶变换将模糊图像转换为频域图像,然后利用Hough变换进行滤波和去噪,最后再将频域图像转换回空域图像,得到复原后的图像。该方法在复原运动模糊图像方面具有较好的效果和可行性。关键词:Hough变换;运动模糊;图像复原1.引言随着图像处理技术的发展和应用范围的不断扩大,图像复原技术也变得越来越重要。运动模糊图像复原是图像处理领域中的一个研究热点,运动模糊是指由运动物体或相机自身运动引起的图

一种基于阵列图像的运动模糊图像复原方法.pdf
本发明公开了一种基于阵列图像的运动模糊图像复原方法。该运动模糊图像复原方法,首先由同焦距阵列镜头获取运动物体某时刻的阵列图像,对获取的阵列图像以中心图像为参考图像进行多尺度特征的配准,然后对阵列图像进行基于小波的图像融合,最后用Lucy‑Richardson算法去除残留的模糊信息,最终实现效果较好的运动模糊图像的复原。该发明在3×3阵列镜头上得到有效的验证,可扩展移动设备在图像复原领域的应用范围。