
一种基于阵列图像的运动模糊图像复原方法.pdf

一吃****昕靓


1/9

2/9

3/9

4/9

5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于阵列图像的运动模糊图像复原方法.pdf
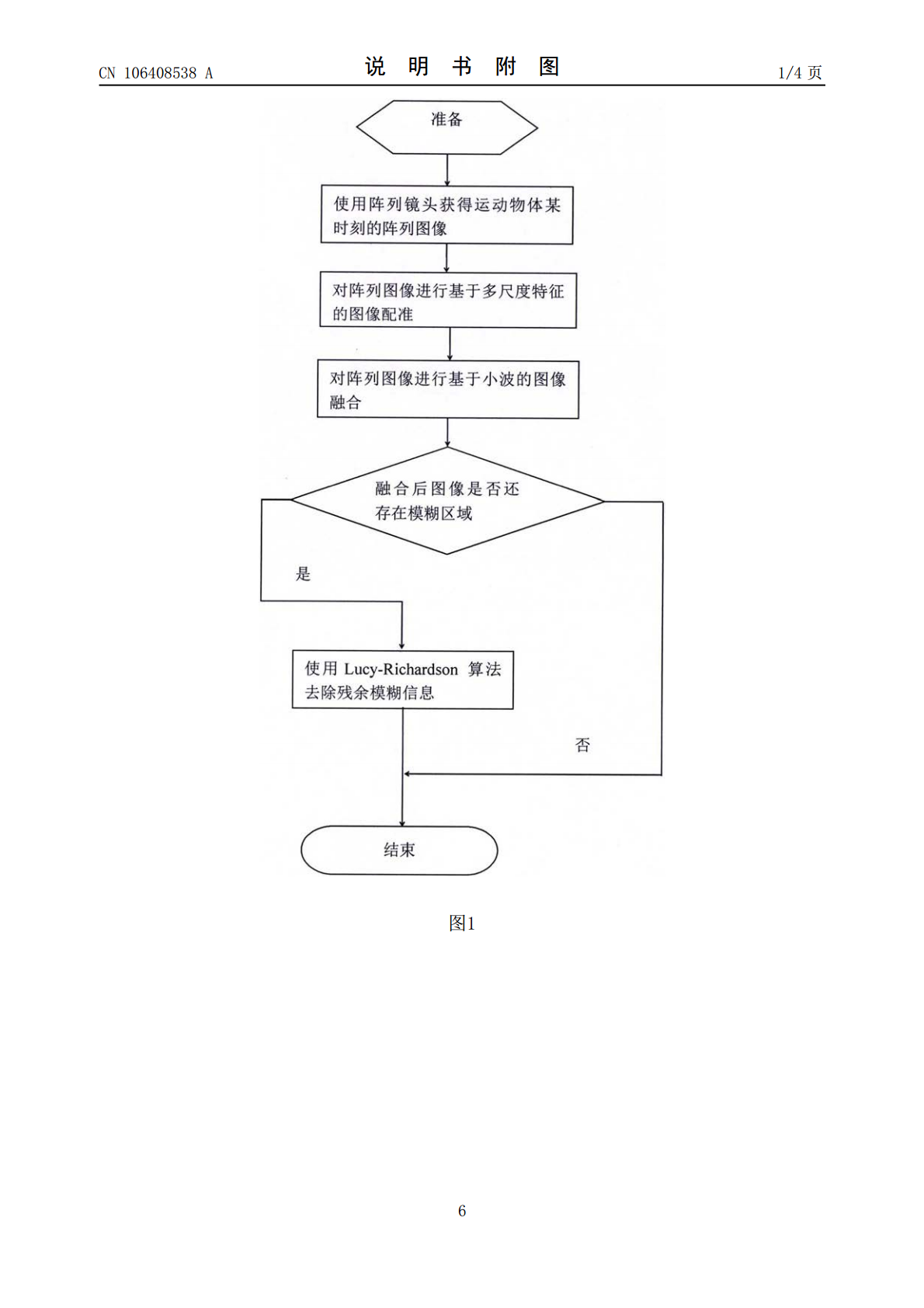
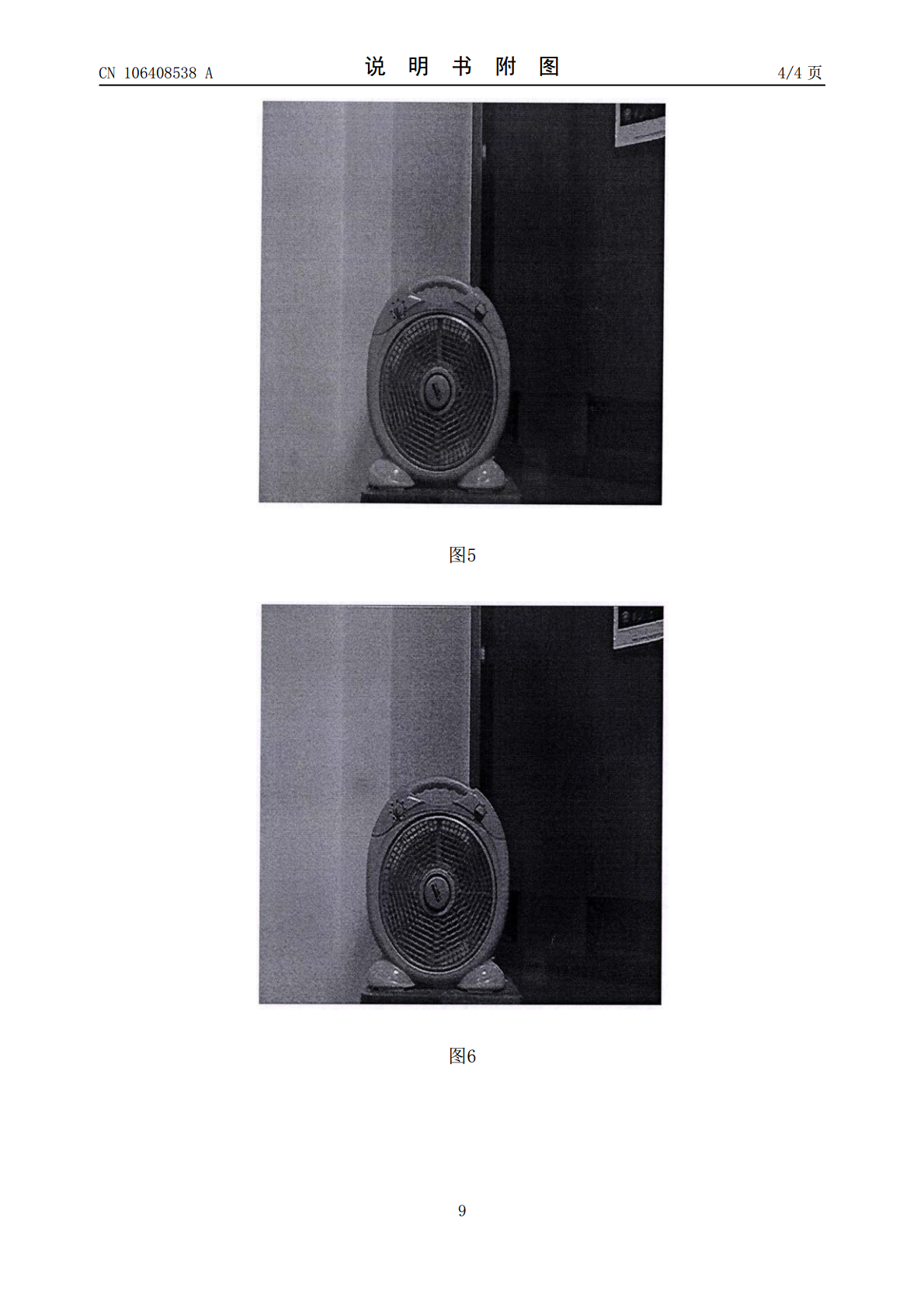
本发明公开了一种基于阵列图像的运动模糊图像复原方法。该运动模糊图像复原方法,首先由同焦距阵列镜头获取运动物体某时刻的阵列图像,对获取的阵列图像以中心图像为参考图像进行多尺度特征的配准,然后对阵列图像进行基于小波的图像融合,最后用Lucy‑Richardson算法去除残留的模糊信息,最终实现效果较好的运动模糊图像的复原。该发明在3×3阵列镜头上得到有效的验证,可扩展移动设备在图像复原领域的应用范围。

一种基于Hough变换的运动模糊图像复原方法.docx
一种基于Hough变换的运动模糊图像复原方法摘要本文提出了一种基于Hough变换的运动模糊图像复原方法。该方法可以采用傅里叶变换将模糊图像转换为频域图像,然后利用Hough变换进行滤波和去噪,最后再将频域图像转换回空域图像,得到复原后的图像。该方法在复原运动模糊图像方面具有较好的效果和可行性。关键词:Hough变换;运动模糊;图像复原1.引言随着图像处理技术的发展和应用范围的不断扩大,图像复原技术也变得越来越重要。运动模糊图像复原是图像处理领域中的一个研究热点,运动模糊是指由运动物体或相机自身运动引起的图
一种基于高频图像块估计模糊核的运动模糊复原方法.pdf
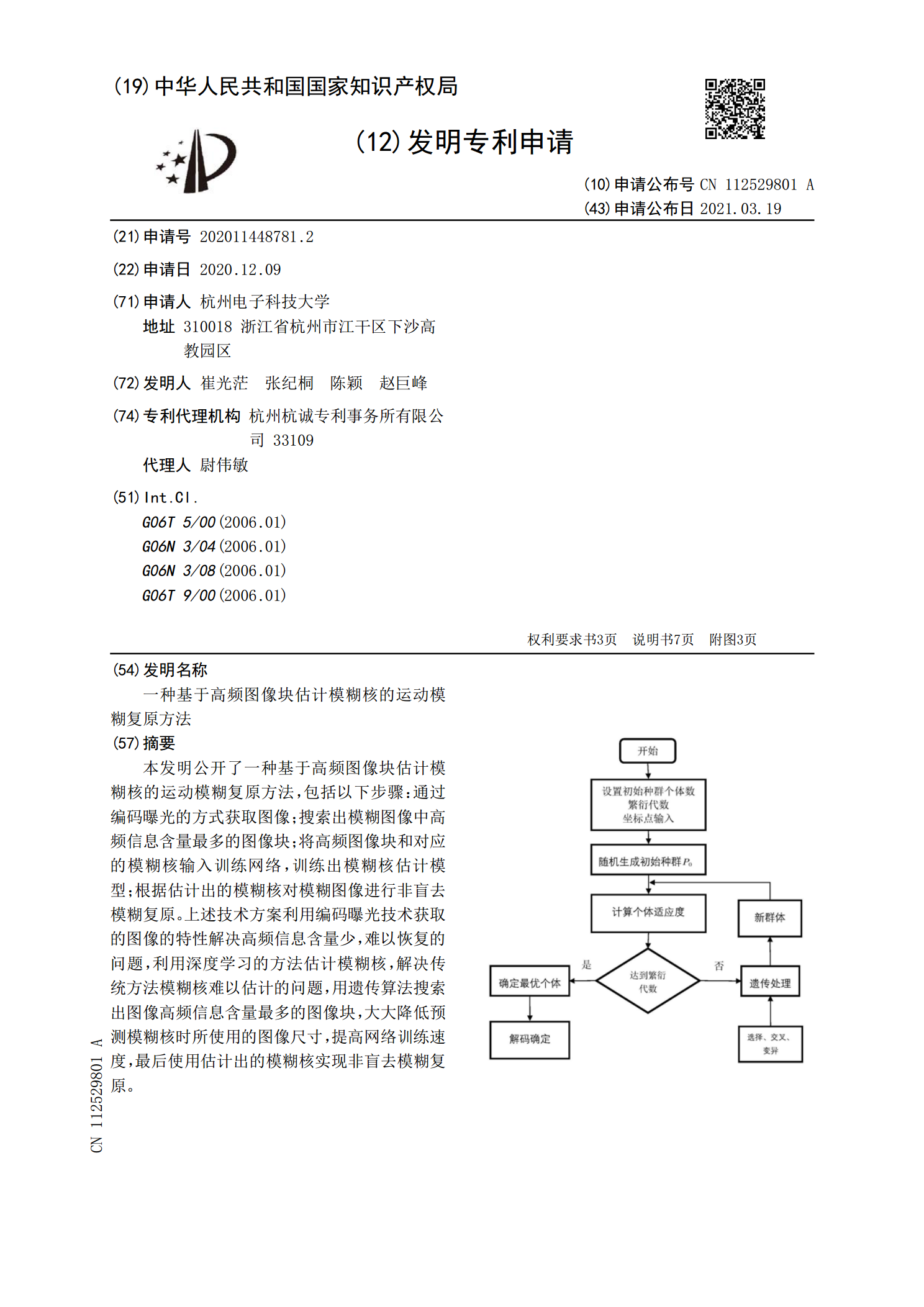
本发明公开了一种基于高频图像块估计模糊核的运动模糊复原方法,包括以下步骤:通过编码曝光的方式获取图像;搜索出模糊图像中高频信息含量最多的图像块;将高频图像块和对应的模糊核输入训练网络,训练出模糊核估计模型;根据估计出的模糊核对模糊图像进行非盲去模糊复原。上述技术方案利用编码曝光技术获取的图像的特性解决高频信息含量少,难以恢复的问题,利用深度学习的方法估计模糊核,解决传统方法模糊核难以估计的问题,用遗传算法搜索出图像高频信息含量最多的图像块,大大降低预测模糊核时所使用的图像尺寸,提高网络训练速度,最后使用估

基于遥感图像的运动模糊复原方法研究的开题报告.docx
基于遥感图像的运动模糊复原方法研究的开题报告一、研究背景随着遥感技术的飞速发展,遥感图像在日常生活、农业、环境、气象等领域得到了广泛的应用。然而,在图像拍摄时,由于风吹、震动等环境因素的影响,都会导致图像产生运动模糊,影响遥感图像的质量和精度。因此,运动模糊复原是遥感图像处理的重要问题之一。二、研究问题在遥感图像中,运动模糊往往是由目标或相机相对运动造成的,因此我们需要对遥感图像进行运动模糊复原,以获得更加清晰、准确的图像。运动模糊的复原方法有许多种,目前主要分为基于盲复原和非盲复原方法。基于盲复原的方法

针对运动模糊的图像复原方法研究.docx
针对运动模糊的图像复原方法研究摘要本文主要研究了针对运动模糊的图像复原方法。首先介绍了运动模糊的原因和特点,随后介绍了传统的运动模糊图像复原方法,包括Wiener滤波器、逆滤波器和最小二乘滤波器,以及它们的优缺点。最后,本文引入了基于深度学习的图像复原方法,重点讨论了卷积神经网络及其变体的应用情况和效果。通过对比实验,我们可以发现,基于深度学习的方法具有更好的复原效果和更广泛的应用前景。关键词:运动模糊;图像复原;深度学习;卷积神经网络引言随着图片技术的发展,数字化时代的到来,人们可以轻松地拍摄和获取图像