
数据融合方法、装置、无人驾驶设备和可读存储介质.pdf

Ch****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

数据融合方法、装置、无人驾驶设备和可读存储介质.pdf
本申请公开了一种数据融合方法、装置、无人驾驶设备和可读存储介质。其中方法包括:获取相机的输出数据和雷达的输出数据,对相机的输出数据进行预处理得到视觉点云,对雷达的输出数据进行预处理得到雷达跟踪点;根据视觉点云生成具有时间记忆性的三维概率栅格地图,按照生命周期存储雷达跟踪点;将三维概率栅格地图与存储的雷达跟踪点进行融合,生成二维直方图,供无人驾驶决策单元使用。上述方案将相机和雷达获取的数据转化为三维概率栅格地图和以生命周期存储的跟踪点,然后融合到二维直方图中,简化了融合方法,保留了地图记忆,便于在无人驾驶场
数据融合调度方法、装置、设备及可读存储介质.pdf
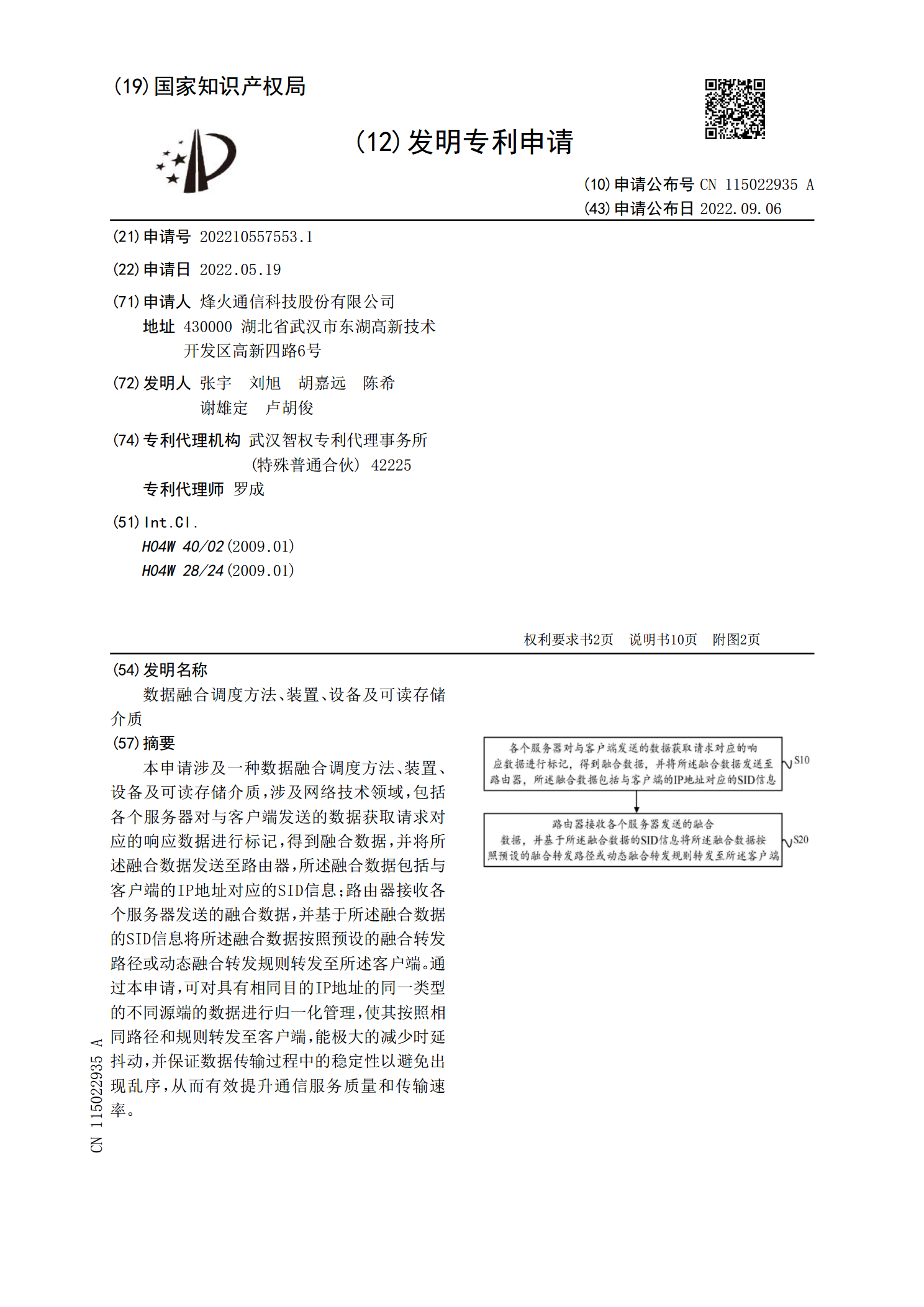
本申请涉及一种数据融合调度方法、装置、设备及可读存储介质,涉及网络技术领域,包括各个服务器对与客户端发送的数据获取请求对应的响应数据进行标记,得到融合数据,并将所述融合数据发送至路由器,所述融合数据包括与客户端的IP地址对应的SID信息;路由器接收各个服务器发送的融合数据,并基于所述融合数据的SID信息将所述融合数据按照预设的融合转发路径或动态融合转发规则转发至所述客户端。通过本申请,可对具有相同目的IP地址的同一类型的不同源端的数据进行归一化管理,使其按照相同路径和规则转发至客户端,能极大的减少时延抖动

数据融合方法、装置、计算机设备和可读存储介质.pdf
本申请涉及一种数据融合方法、装置、计算机设备和可读存储介质。所述数据融合方法包括:配准目标对象的功能图像与所述目标对象的解剖图像,得到配准结果;根据所述解剖图像,获取第一目标图像以及第二目标图像,其中,所述第二目标图像中包括血管,所述第一目标图像中包括剩余器官;确定功能参数在所述第一目标图像包含的所述剩余器官的外轮廓上的映射数据;根据所述映射数据,获取所述剩余器官的外轮廓图像;根据所述第二目标图像,获取模拟数据,其中,所述模拟数据表征预设参数在所述血管中的分布状况;融合所述外轮廓图像与所述模拟数据。本申请
数据挖掘方法、装置、设备和可读存储介质.pdf
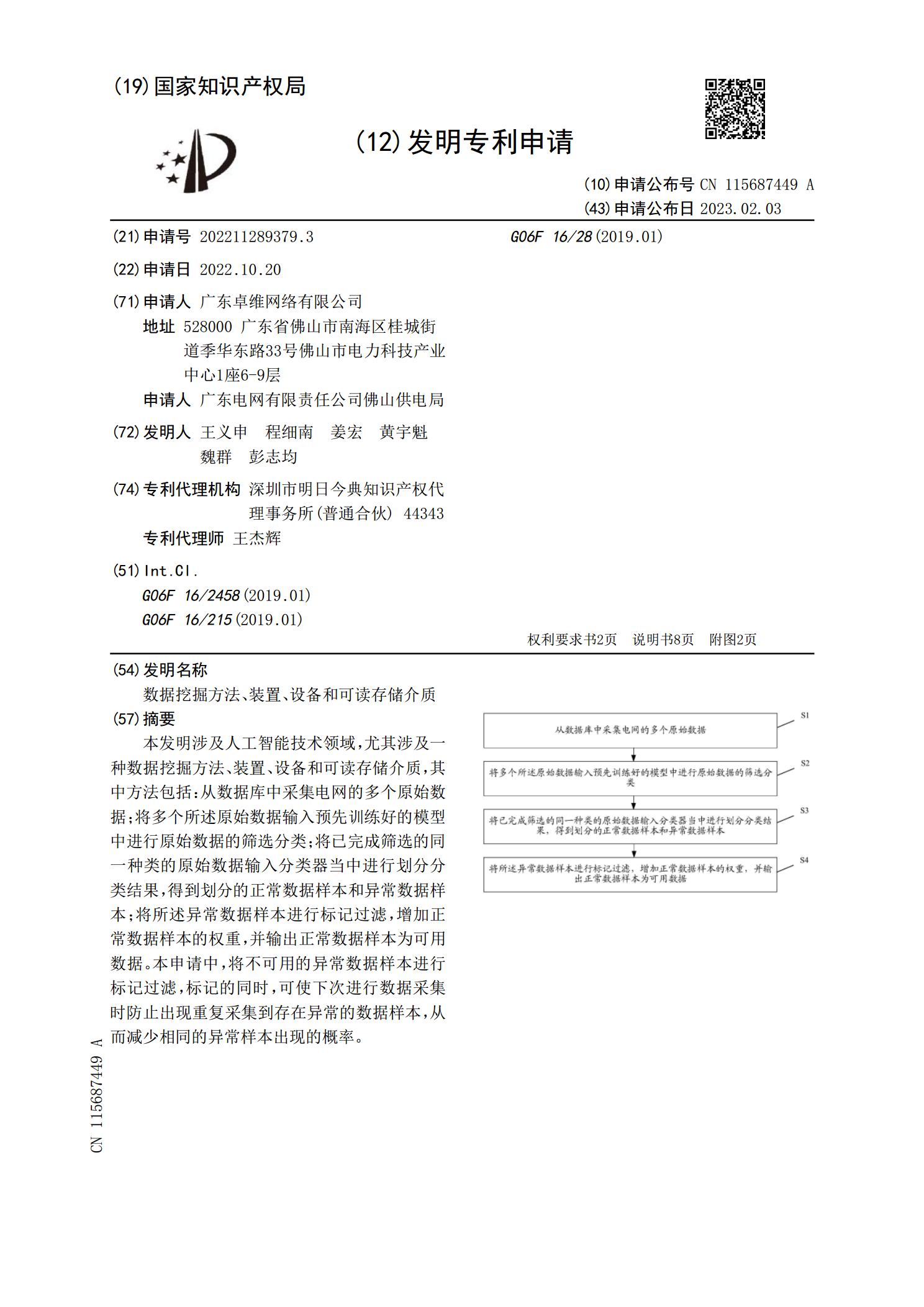
本发明涉及人工智能技术领域,尤其涉及一种数据挖掘方法、装置、设备和可读存储介质,其中方法包括:从数据库中采集电网的多个原始数据;将多个所述原始数据输入预先训练好的模型中进行原始数据的筛选分类;将已完成筛选的同一种类的原始数据输入分类器当中进行划分分类结果,得到划分的正常数据样本和异常数据样本;将所述异常数据样本进行标记过滤,增加正常数据样本的权重,并输出正常数据样本为可用数据。本申请中,将不可用的异常数据样本进行标记过滤,标记的同时,可使下次进行数据采集时防止出现重复采集到存在异常的数据样本,从而减少相同

数据融合方法、相关设备及可读存储介质.pdf
本申请公开了一种数据融合方法、相关设备及可读存储介质,由于知识库中与待处理数据的相似度最高且大于预设阈值的数据与待处理数据的重复度最高,本方案中,在获取待处理数据之后,先从与该待处理数据对应的知识库中确定与该待处理数据的相似度最高且大于预设阈值的数据作为目标数据,在确定出该目标数据之后,说明知识库中已经存在与待处理数据重复的数据,本方案中,并未将待处理数据直接构建至知识库中,因此,能够降低知识库中数据的重复率,本方案中,也未将待处理数据摒弃,而是将该待处理数据和该目标数据进行融合,可以对目标数据中的错误信