
智能机器人手臂控制系统.docx

Ma****57


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

智能机器人手臂控制系统.docx
智能机器人手臂控制系统引言机器人诞生于20世纪发展比较快而且应用极其广泛应用于抗震救灾机械加工生产科学研究国防中对人们的生产生活起到了巨大的影响在生活与生产中早就成为了必不可少的生产力加快了人类的进步和社会的发展促进了国家先进生产力的提高智能机器人越来越成为机器人制造的主流采用无线传播系统超声波传感测距无线技术传播系统能够使机器人更加先进越来越容易被人们应用对生产起到很大的促进作用。1履带式移动机器人总体设计1.1履带式移动机器人的运动机构设
智能机器人手臂控制系统.docx
智能机器人手臂控制系统引言机器人诞生于20世纪发展比较快而且应用极其广泛应用于抗震救灾机械加工生产科学研究国防中对人们的生产生活起到了巨大的影响在生活与生产中早就成为了必不可少的生产力加快了人类的进步和社会的发展促进了国家先进生产力的提高智能机器人越来越成为机器人制造的主流采用无线传播系统超声波传感测距无线技术传播系统能够使机器人更加先进越来越容易被人们应用对生产起到很大的促进作用。1履带式移动机器人总体设计1.1履带式移动机器人的运动机构设
智能型保姆机器人手臂.pdf
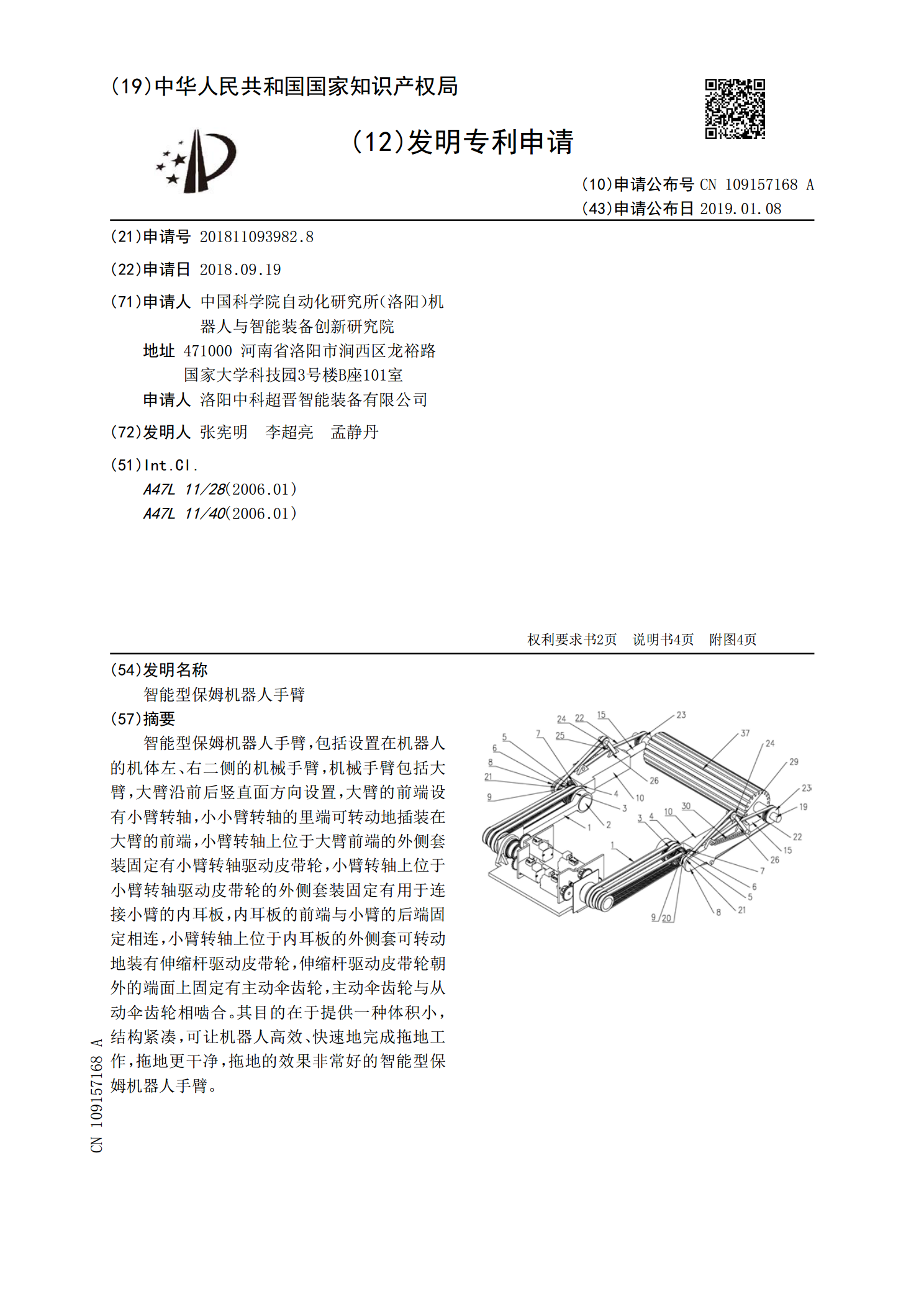
智能型保姆机器人手臂,包括设置在机器人的机体左、右二侧的机械手臂,机械手臂包括大臂,大臂沿前后竖直面方向设置,大臂的前端设有小臂转轴,小小臂转轴的里端可转动地插装在大臂的前端,小臂转轴上位于大臂前端的外侧套装固定有小臂转轴驱动皮带轮,小臂转轴上位于小臂转轴驱动皮带轮的外侧套装固定有用于连接小臂的内耳板,内耳板的前端与小臂的后端固定相连,小臂转轴上位于内耳板的外侧套可转动地装有伸缩杆驱动皮带轮,伸缩杆驱动皮带轮朝外的端面上固定有主动伞齿轮,主动伞齿轮与从动伞齿轮相啮合。其目的在于提供一种体积小,结构紧凑,可

机器人手臂控制系统的设计与研究.docx
机器人手臂控制系统的设计与研究机器人手臂控制系统的设计与研究摘要:随着机器人技术的不断发展和应用,机器人手臂控制系统的设计与研究变得越来越重要。本论文介绍了机器人手臂控制系统的基本原理与结构,并探讨了目前存在的问题及其解决方案。通过分析不同类型的机器人手臂控制系统,提出了改进机器人手臂控制系统性能的一些新方法。最后,本论文对未来机器人手臂控制系统的发展方向进行了展望。关键词:机器人手臂;控制系统;设计与研究;性能改进1.引言机器人手臂是机器人系统中的重要部分,它能够执行复杂的任务,如装配、搬运、焊接等。机

智能型保姆机器人手臂驱动机构.pdf
智能型保姆机器人手臂驱动机构,包括底板,底板上方的左侧沿左右水平方向可转动地设有左动力输出轴,底板上方的右侧沿左右水平方向可转动地设有右动力输出轴,右动力输出轴与左动力输出轴同轴线设置,右动力输出轴的左端固定有右动力输出轴齿轮,右动力输出轴齿轮的前端与中间外套筒右齿轮的后端相啮合,中间外套筒右齿轮固定在中间外套筒的右端,中间外套筒沿左右水平方向可转动地安装在底板的上方,中间外套筒内采用间隙配合可转动地插装有中间中套筒,中间中套筒的左右二端分别伸出中间外套筒。其目的在于提供一种体积小,结构紧凑,可让机器人高