
智能家庭清洁机器人专利技术综述.docx

宏硕****mo


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能家庭清洁机器人专利技术综述.docx
智能家庭清洁机器人专利技术综述【摘要】随着计算机技术的发展智能家庭清洁机器人将成为智能物联网时代家庭的核心终端。本文分析了国内外智能家庭清洁机器人的专利申请情况并以时间为主线针对清洁机器人的路径规划、智能避障和地面清洁情况监测三个方面对清洁机器人的技术发展路线进行梳理。通过对清洁机器人的专利发展趋势进行分析希望对我国智能家庭清洁机器人技术的发展提供一些参考信息。【关键词】清洁机器人专利申请一、引言国际机器人联合会(International
智能家庭清洁机器人专利技术综述.docx
智能家庭清洁机器人专利技术综述【摘要】随着计算机技术的发展智能家庭清洁机器人将成为智能物联网时代家庭的核心终端。本文分析了国内外智能家庭清洁机器人的专利申请情况并以时间为主线针对清洁机器人的路径规划、智能避障和地面清洁情况监测三个方面对清洁机器人的技术发展路线进行梳理。通过对清洁机器人的专利发展趋势进行分析希望对我国智能家庭清洁机器人技术的发展提供一些参考信息。【关键词】清洁机器人专利申请一、引言国际机器人联合会(International

家庭智能清洁机器人.pptx

Fitbit智能手环的专利技术综述.docx
Fitbit智能手环的专利技术综述Fitbit是全球领先的智能健康手环品牌之一,在智能健康手环领域拥有许多专利技术,这些技术保证了Fitbit手环在市场上的领先地位。本文将对Fitbit智能手环的专利技术进行综述,旨在了解Fitbit手环的优势和未来方向。一、运动传感器技术Fitbit手环的运动传感器技术是其最核心的技术之一。该技术包括加速度计、陀螺仪等传感器,能够探测用户的运动轨迹和身体姿态,为用户提供准确的运动数据。该技术能够记录睡眠质量、步数、热量消耗和心率等数据。用户可以通过Fitbit手环或其它
智能清洁机器人.pdf
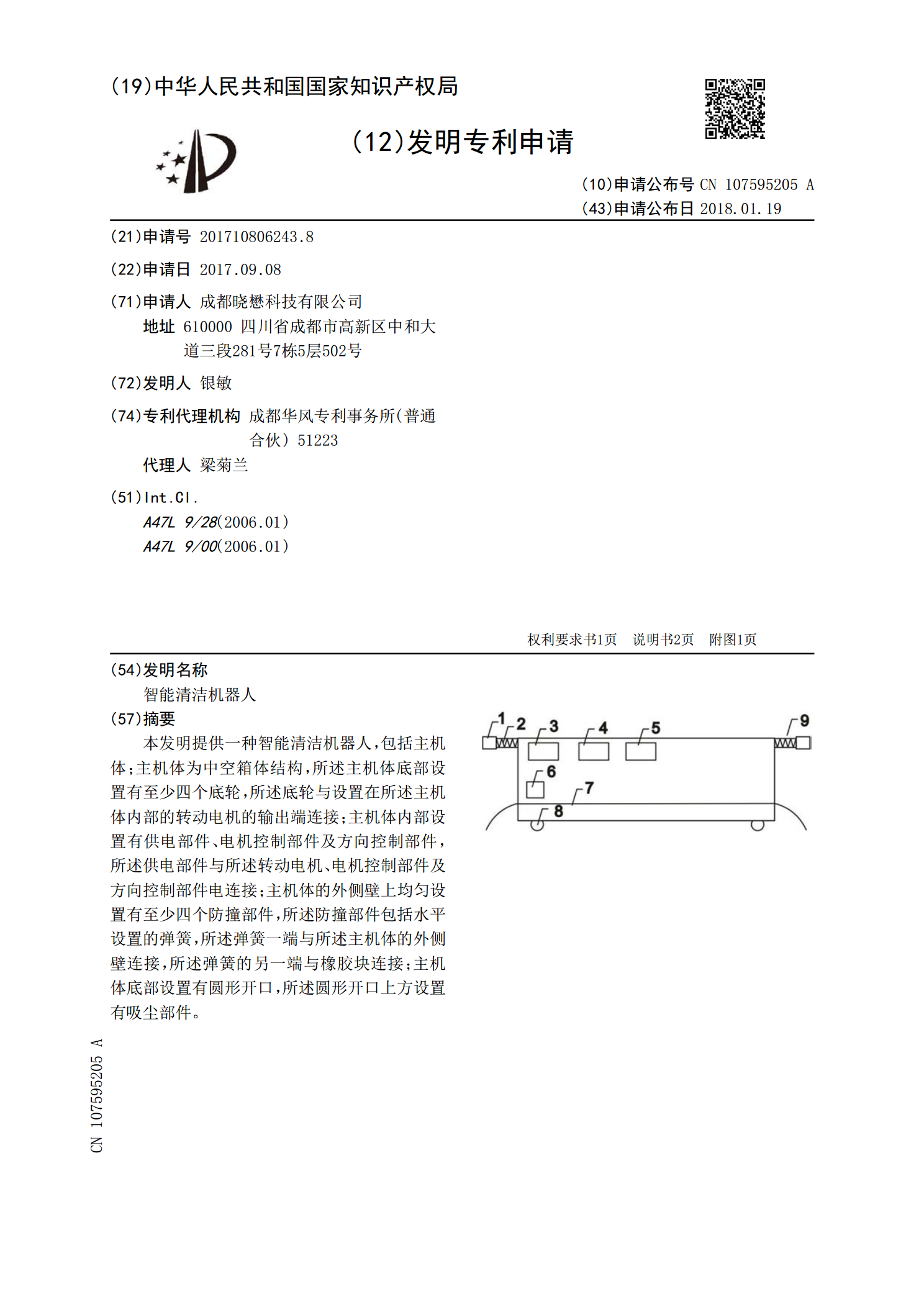
本发明提供一种智能清洁机器人,包括主机体;主机体为中空箱体结构,所述主机体底部设置有至少四个底轮,所述底轮与设置在所述主机体内部的转动电机的输出端连接;主机体内部设置有供电部件、电机控制部件及方向控制部件,所述供电部件与所述转动电机、电机控制部件及方向控制部件电连接;主机体的外侧壁上均匀设置有至少四个防撞部件,所述防撞部件包括水平设置的弹簧,所述弹簧一端与所述主机体的外侧壁连接,所述弹簧的另一端与橡胶块连接;主机体底部设置有圆形开口,所述圆形开口上方设置有吸尘部件。