
一种物体位姿测量方法、装置及存储介质.pdf

玉怡****文档


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种物体位姿测量方法、装置及存储介质.pdf
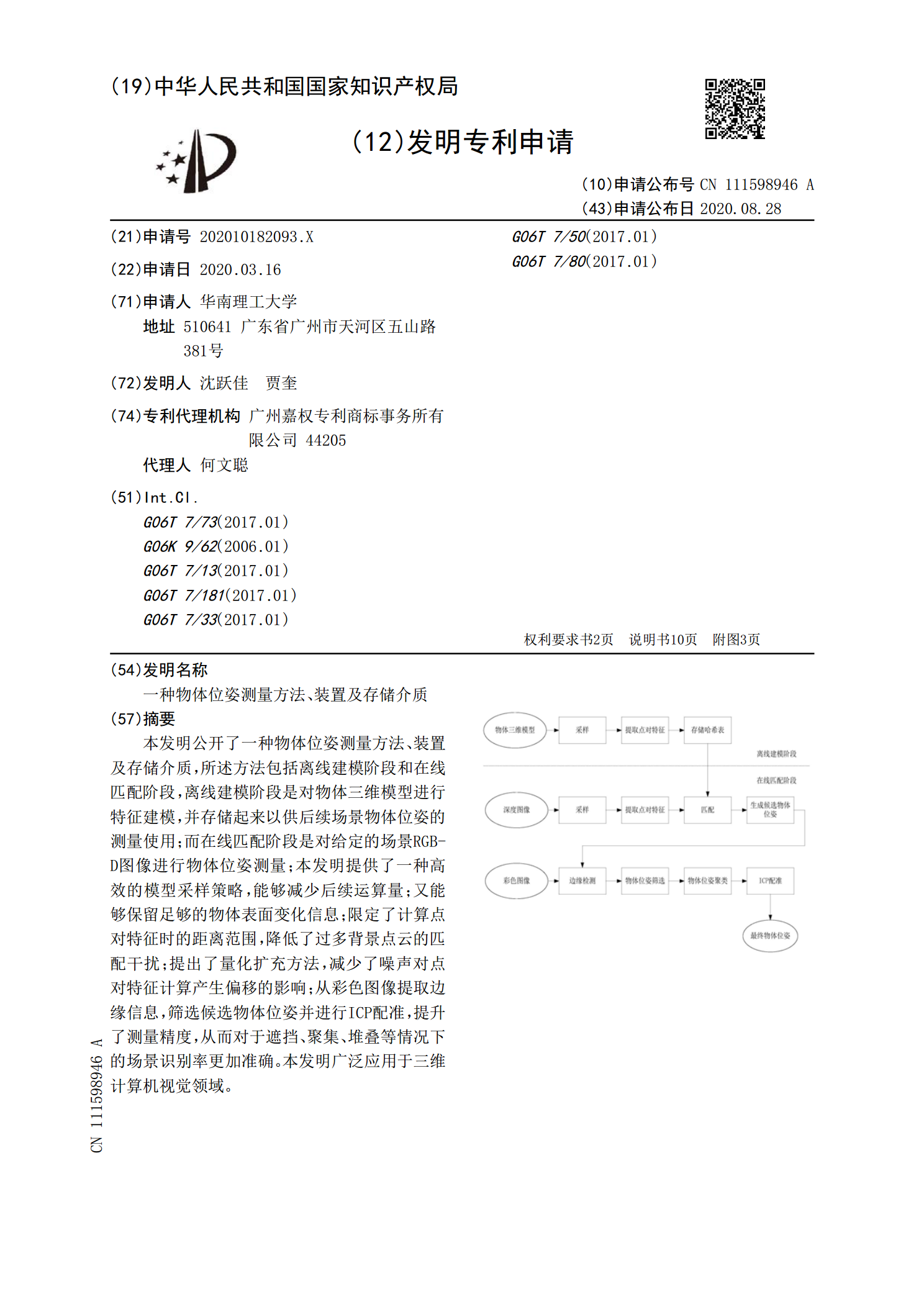
本发明公开了一种物体位姿测量方法、装置及存储介质,所述方法包括离线建模阶段和在线匹配阶段,离线建模阶段是对物体三维模型进行特征建模,并存储起来以供后续场景物体位姿的测量使用;而在线匹配阶段是对给定的场景RGB‑D图像进行物体位姿测量;本发明提供了一种高效的模型采样策略,能够减少后续运算量;又能够保留足够的物体表面变化信息;限定了计算点对特征时的距离范围,降低了过多背景点云的匹配干扰;提出了量化扩充方法,减少了噪声对点对特征计算产生偏移的影响;从彩色图像提取边缘信息,筛选候选物体位姿并进行ICP配准,提升了
物体位姿识别方法及装置、视觉处理设备和可读存储介质.pdf
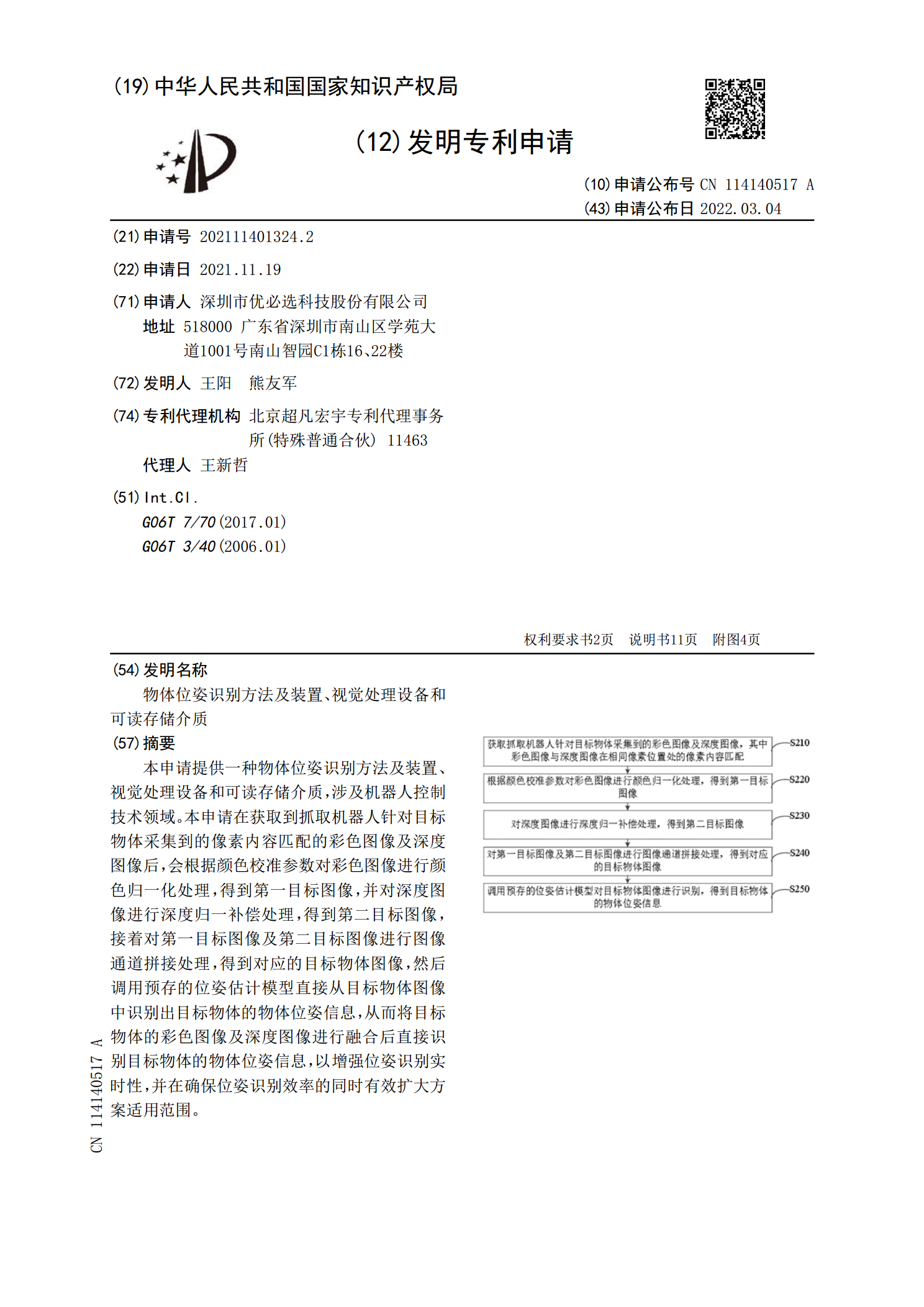
本申请提供一种物体位姿识别方法及装置、视觉处理设备和可读存储介质,涉及机器人控制技术领域。本申请在获取到抓取机器人针对目标物体采集到的像素内容匹配的彩色图像及深度图像后,会根据颜色校准参数对彩色图像进行颜色归一化处理,得到第一目标图像,并对深度图像进行深度归一补偿处理,得到第二目标图像,接着对第一目标图像及第二目标图像进行图像通道拼接处理,得到对应的目标物体图像,然后调用预存的位姿估计模型直接从目标物体图像中识别出目标物体的物体位姿信息,从而将目标物体的彩色图像及深度图像进行融合后直接识别目标物体的物体位
一种温度测量方法及装置、存储介质.pdf
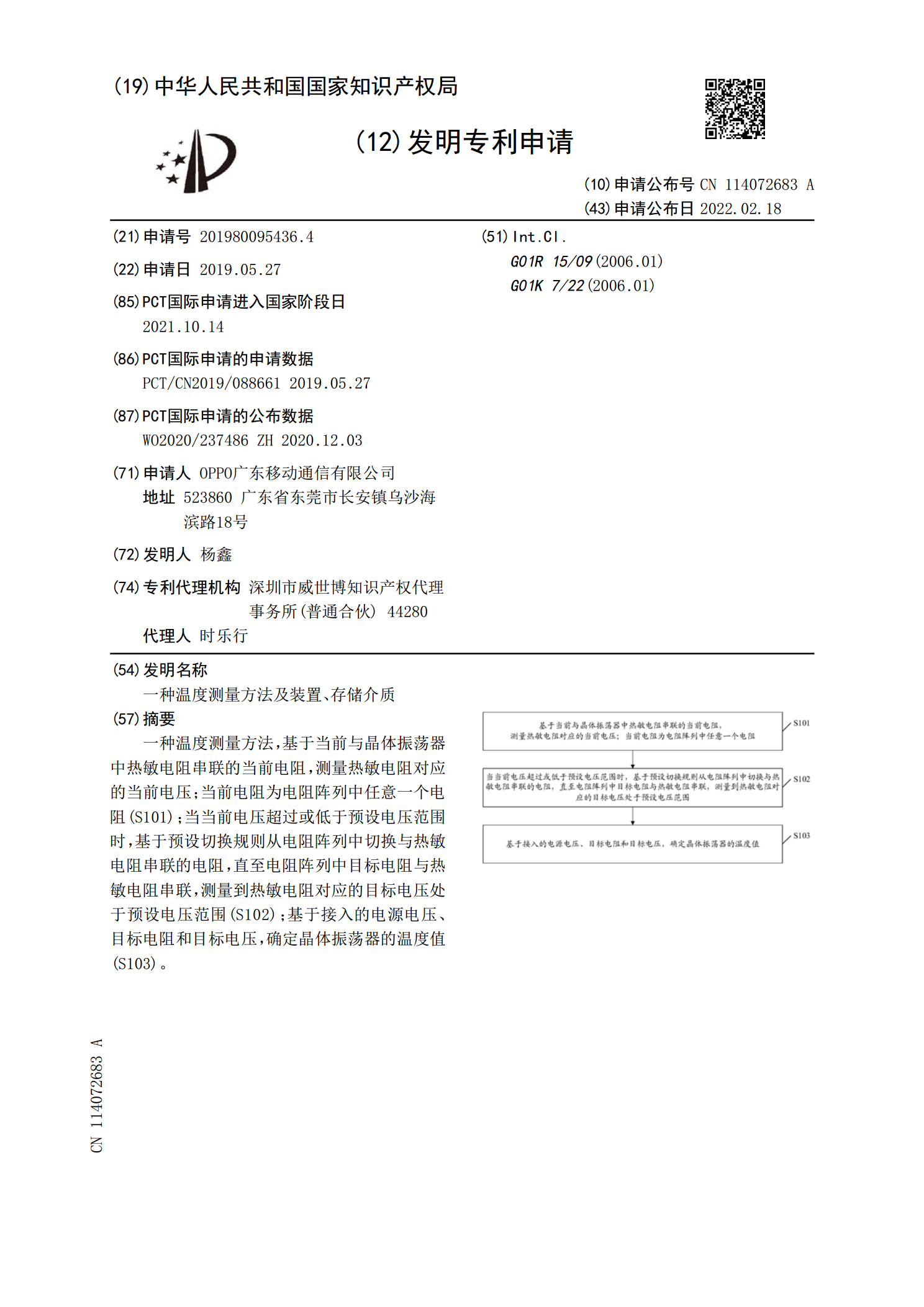
一种温度测量方法,基于当前与晶体振荡器中热敏电阻串联的当前电阻,测量热敏电阻对应的当前电压;当前电阻为电阻阵列中任意一个电阻(S101);当当前电压超过或低于预设电压范围时,基于预设切换规则从电阻阵列中切换与热敏电阻串联的电阻,直至电阻阵列中目标电阻与热敏电阻串联,测量到热敏电阻对应的目标电压处于预设电压范围(S102);基于接入的电源电压、目标电阻和目标电压,确定晶体振荡器的温度值(S103)。
一种转速测量方法、装置、设备及存储介质.pdf
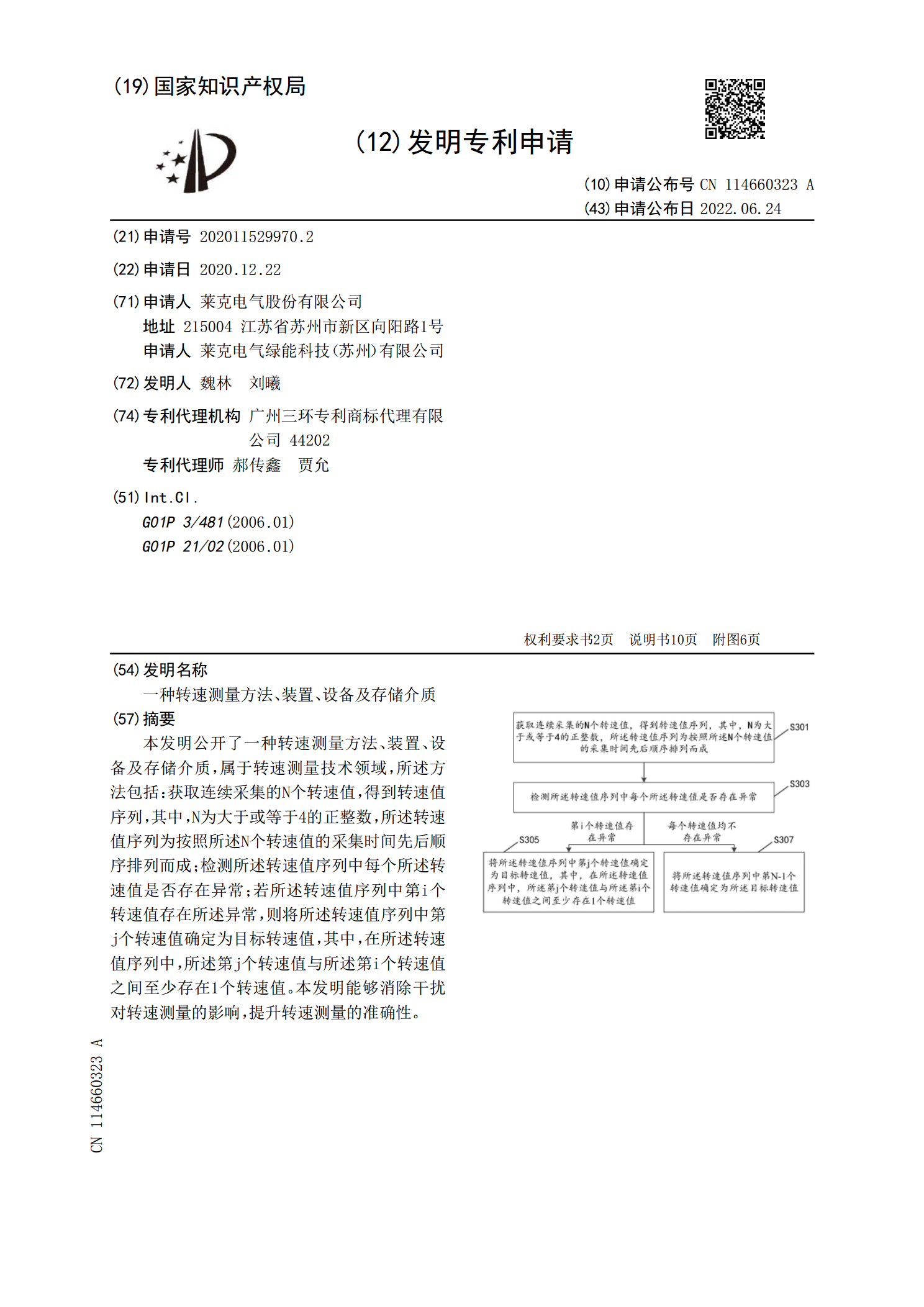
本发明公开了一种转速测量方法、装置、设备及存储介质,属于转速测量技术领域,所述方法包括:获取连续采集的N个转速值,得到转速值序列,其中,N为大于或等于4的正整数,所述转速值序列为按照所述N个转速值的采集时间先后顺序排列而成;检测所述转速值序列中每个所述转速值是否存在异常;若所述转速值序列中第i个转速值存在所述异常,则将所述转速值序列中第j个转速值确定为目标转速值,其中,在所述转速值序列中,所述第j个转速值与所述第i个转速值之间至少存在1个转速值。本发明能够消除干扰对转速测量的影响,提升转速测量的准确性。
一种行人距离测量方法、装置及存储介质.pdf
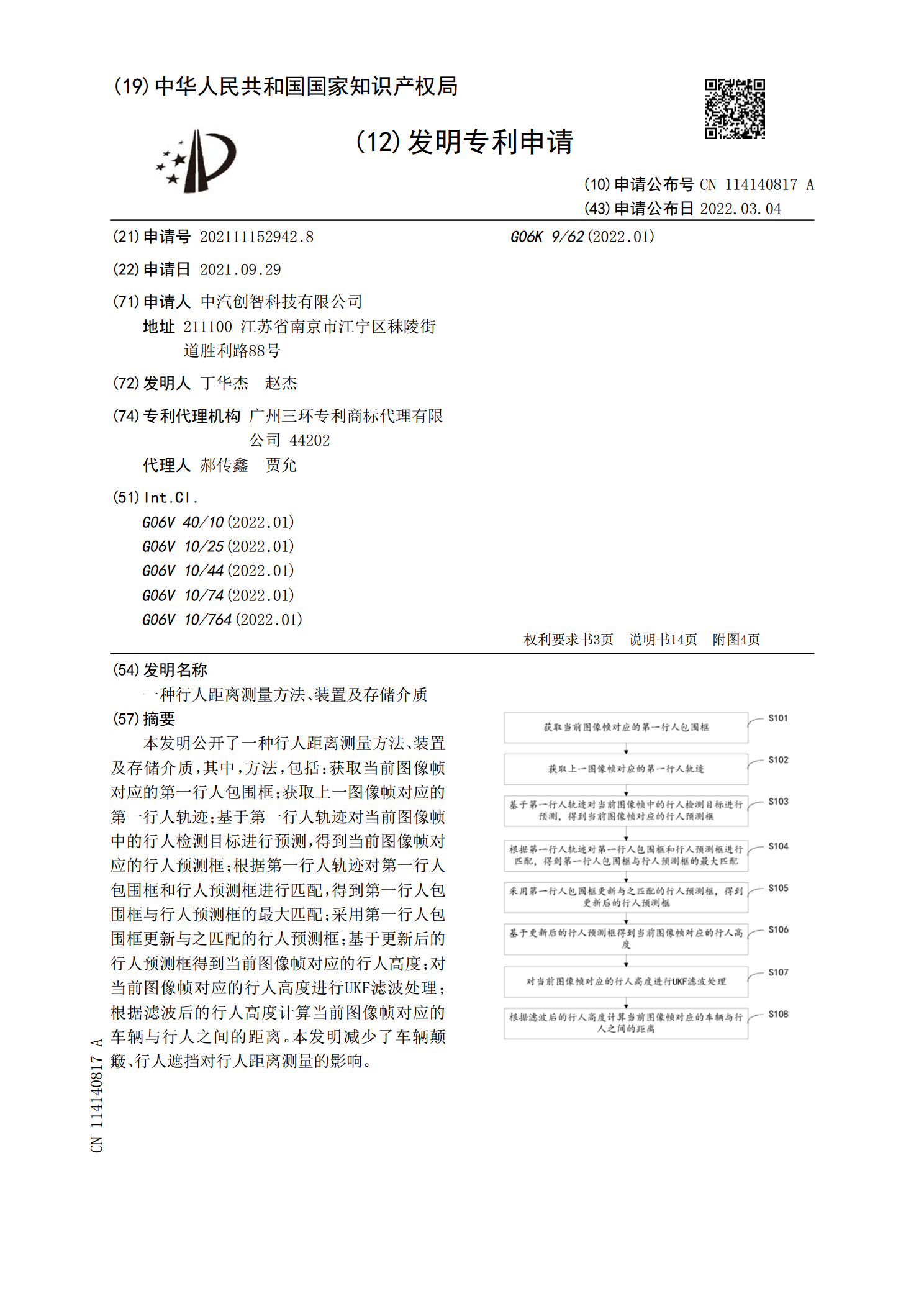
本发明公开了一种行人距离测量方法、装置及存储介质,其中,方法,包括:获取当前图像帧对应的第一行人包围框;获取上一图像帧对应的第一行人轨迹;基于第一行人轨迹对当前图像帧中的行人检测目标进行预测,得到当前图像帧对应的行人预测框;根据第一行人轨迹对第一行人包围框和行人预测框进行匹配,得到第一行人包围框与行人预测框的最大匹配;采用第一行人包围框更新与之匹配的行人预测框;基于更新后的行人预测框得到当前图像帧对应的行人高度;对当前图像帧对应的行人高度进行UKF滤波处理;根据滤波后的行人高度计算当前图像帧对应的车辆与行