
用于机器人收获的双末端执行器.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共80页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于机器人收获的双末端执行器.pdf
一种示例系统包括:喷嘴,其具有入口;出口机构,其纵向地设置在喷嘴附近;导管,其纵向地邻近出口机构,其中该导管包括沿着导管的长度纵向地设置的远端腔室、中间腔室和近端腔室;隔离块,其被构造成在(i)第一位置和(ii)第二位置之间移动,在第一位置处,隔离块横向地邻近中间腔室设置,使得隔离块偏离导管的纵向轴线,在第二位置处,隔离块驻留在远端腔室和近端腔室之间的中间腔室中;和减速结构,其设置在导管的近端并界定近端腔室,其中减速结构被构造成使已经穿过导管的果实减速。
机器人末端执行器.pdf
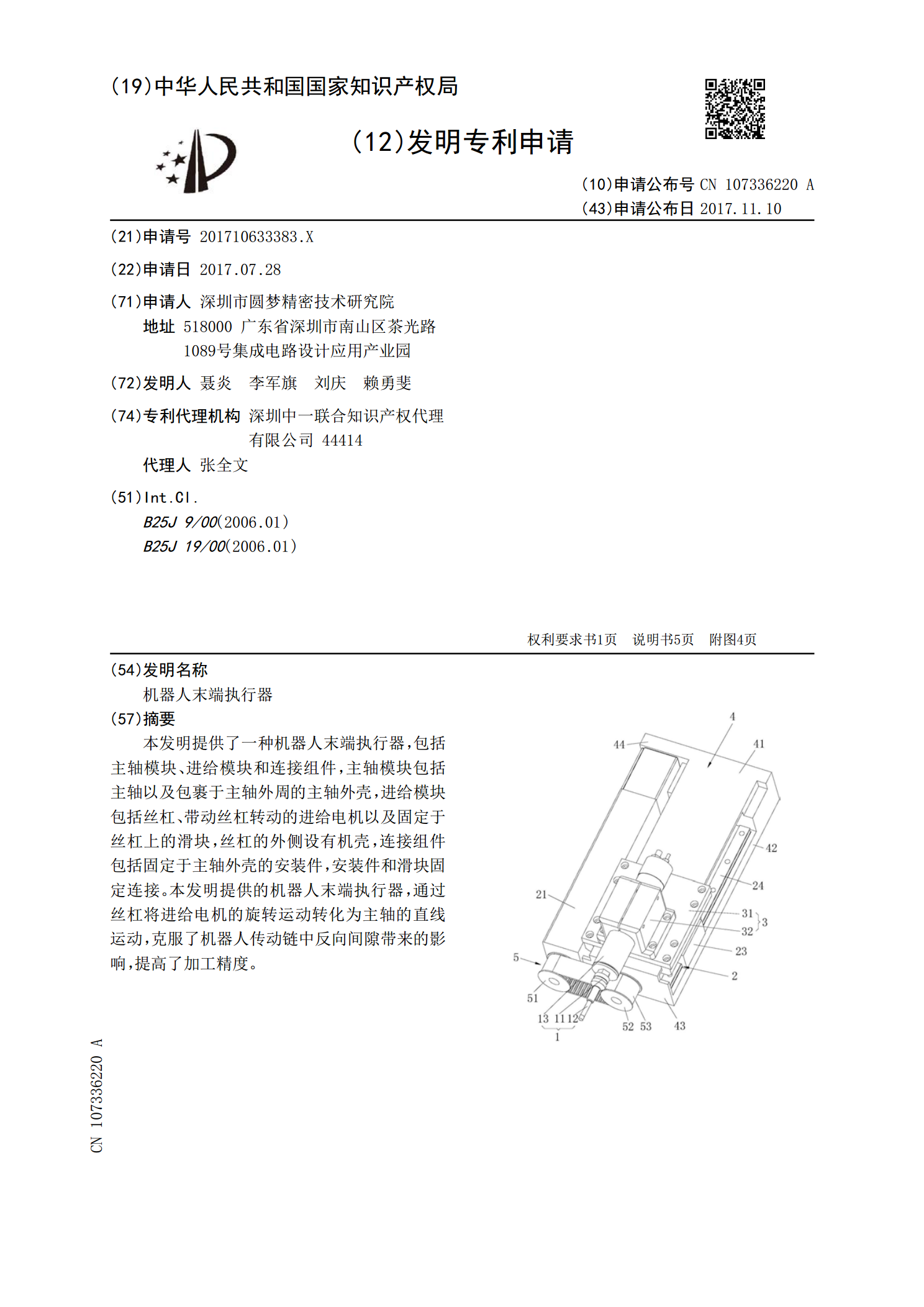
本发明提供了一种机器人末端执行器,包括主轴模块、进给模块和连接组件,主轴模块包括主轴以及包裹于主轴外周的主轴外壳,进给模块包括丝杠、带动丝杠转动的进给电机以及固定于丝杠上的滑块,丝杠的外侧设有机壳,连接组件包括固定于主轴外壳的安装件,安装件和滑块固定连接。本发明提供的机器人末端执行器,通过丝杠将进给电机的旋转运动转化为主轴的直线运动,克服了机器人传动链中反向间隙带来的影响,提高了加工精度。

一种用于果实采摘机器人的末端执行器.pdf
本发明提供一种用于果实采摘机器人的末端执行器,包括固定底座、腕部翻转机构、俯仰机构、切割机构,腕部翻转机构同轴套接在固定底座上,固定底座一侧固定齿轮,腕部翻转机构上安装腕部翻转电机,驱动与固定底座上的齿轮相啮合的齿轮转动,腕部翻转机构上固联一侧板,用于支撑俯仰机构,侧板上固定俯仰电机,俯仰机构包括一平面连杆四杆机构,俯仰电机驱动其中一连杆转动,带动与另一连杆固联的俯仰平板转动,切割机构固定在俯仰平板上,切割机构包括通过同步带连接的锯片驱动电机与锯片转轴,锯片驱动电机转动通过同步带传递至锯片转轴,带动固定在

用于机器人系统的末端执行器工具更换器.pdf
本发明公开了一种用于机器人系统的末端执行器工具更换器。其结构紧凑、机械坚固、径向强度高、能够防止非预期旋转、使用最少的传感输入、适用于多种工具且操作快速。所述末端执行器工具更换器包括:机械臂附接部分,其包括第一磁性部分和多个第一接合部分;以及工具附接部分,其包括第二磁性部分和多个第二接合部分,其中所述多个第一接合部分与多个第二接合部分相接合,且每个所述第一接合部分和每个所述第二接合部分选自由销和销槽组成的群组,并且所述第一磁性部分在空间上和磁性均与所述第二磁性部分相对应。

用于铆接装置的末端执行器.pdf
本发明涉及一种用于铆接装置(1)的末端执行器,其中所述末端执行器(2)具有用于将铆接元件(4)加入到构件(5)中的铆接模块(3)、用于将铆接元件(4)从铆钉储存器(7)中输出的铆钉输出机构(6)以及用于将铆接元件(4)从所述铆钉输出机构(6)输送给所述铆接模块(3)的处理装置(8),其中所述处理装置(8)具有调节运动机构(9)和布置在其上的用于抓取所述铆接元件(1)的抓具(10)。提出,所述调节运动机构为了使所述抓具(10)定位而具有至少两个调节轴(A1、A2、A3、A4、A5、A6、A7)。