
一种基于线段聚类的多维度高精度航迹智能预测方法.pdf

志信****pp


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于线段聚类的多维度高精度航迹智能预测方法.pdf
本发明公开了一种基于线段聚类的多维度高精度航迹智能预测方法,将连续的航迹数据离散化,经过突变的经度数据处理、数据清洗和归一化处理后,使用Douglas‑Peucker算法对航迹数据进行压缩,使用DBSCAN聚类算法对航迹进行聚类,根据多维度因素下不同的突发情况,选取与突发情况对应的航迹簇,通过航迹预测神经网络模型进行航迹预测,完成多维度高精度航迹预测任务。本发明将原始航迹数据压缩,在保留航迹特征的情况下极大减轻了计算压力,缩短了运算时间,提高了运算效率;采用卷积加LSTM神经网络模型,使用卷积进行特征提取

基于高斯混合EM聚类的多编队航迹起始方法.docx
基于高斯混合EM聚类的多编队航迹起始方法摘要:编队控制是航空和航天领域中的一个重要研究方向。航迹的确定是实现编队控制的重要步骤。本文提出了一种基于高斯混合EM聚类的多编队航迹起始方法,通过对航迹点的特征向量进行高斯混合EM聚类,确定每个编队的航迹起始点,并计算编队内部和编队间的距离,进而确定编队形态和编队间的关系。实验结果表明,本方法能够有效地确定多编队航迹起始点,提高编队控制精度和效率。关键词:编队控制;航迹起始点;高斯混合EM聚类;距离计算;编队形态引言:编队控制是航空和航天领域中的研究热点之一,应用
一种基于多维航迹特征的目标轨迹聚类方法.pptx
汇报人:/目录0102提取航迹点的几何特征提取航迹点的运动特征提取航迹点的纹理特征特征融合03K-means聚类算法DBSCAN聚类算法层次聚类算法聚类结果评估04基于密度的聚类优化基于层次的聚类优化基于网格的聚类优化优化结果评估05无人机集群协同控制多智能体系统路径规划交通流轨迹分析实例分析与应用效果评估06研究成果总结未来研究方向展望汇报人:
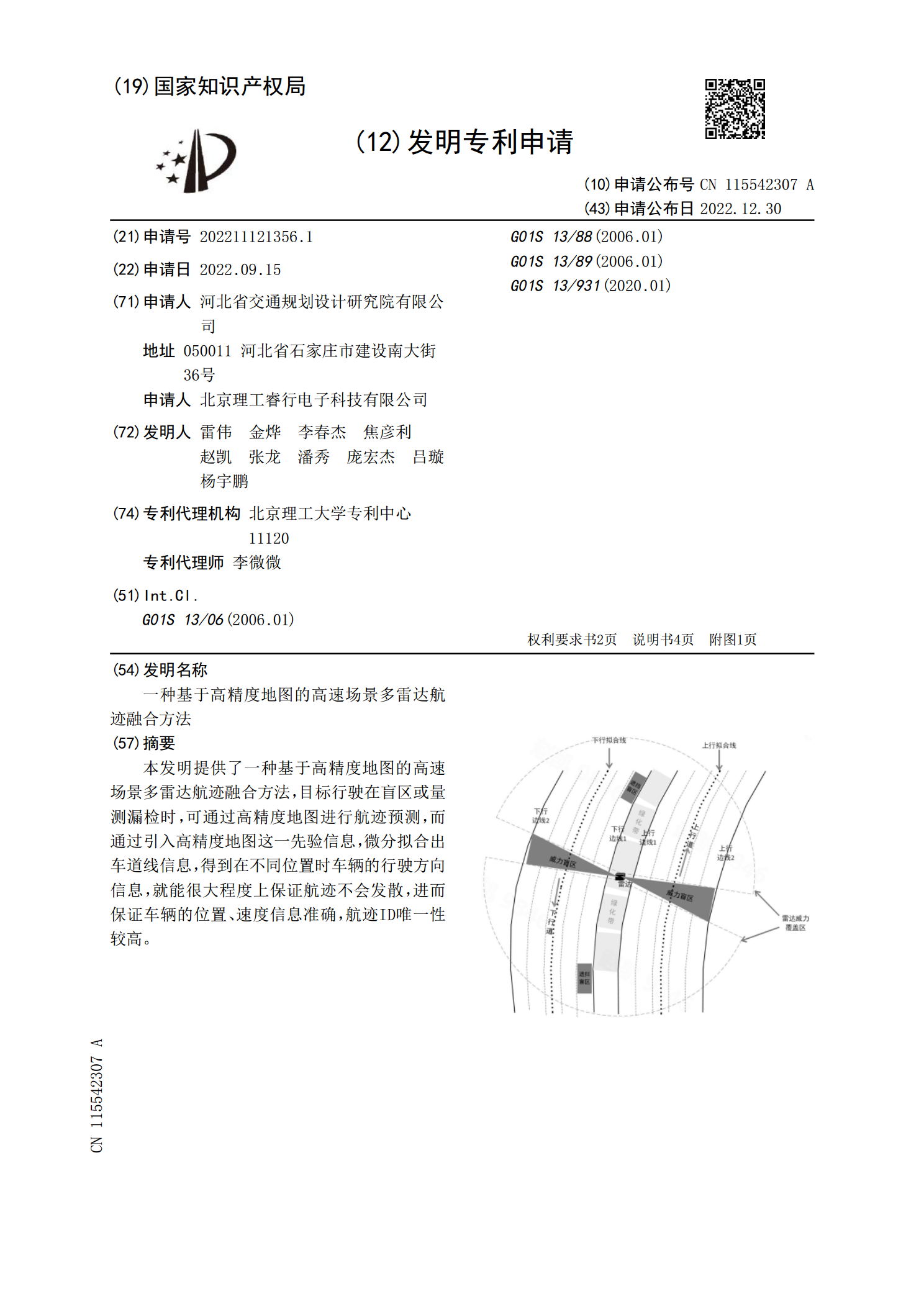
一种基于高精度地图的高速场景多雷达航迹融合方法.pdf
本发明提供了一种基于高精度地图的高速场景多雷达航迹融合方法,目标行驶在盲区或量测漏检时,可通过高精度地图进行航迹预测,而通过引入高精度地图这一先验信息,微分拟合出车道线信息,得到在不同位置时车辆的行驶方向信息,就能很大程度上保证航迹不会发散,进而保证车辆的位置、速度信息准确,航迹ID唯一性较高。

分步的基于模糊聚类的多雷达航迹关联算法.docx
分步的基于模糊聚类的多雷达航迹关联算法引言随着雷达技术的不断发展,航迹关联问题成为了航空交通管制领域中的一个重要问题。多雷达航迹关联算法在解决雷达数据误差较大、天气变化等问题方面有着重要的作用。而模糊聚类算法是一种有效的数据分类方法,可以用于目标跟踪、医学诊断等领域。本文将介绍一种基于模糊聚类的分步多雷达航迹关联算法。一、多雷达航迹数据融合多雷达航迹关联算法首先需要对不同雷达的航迹数据进行融合,以获取更全面、准确的目标跟踪数据。由于雷达数据的不确定性和误差性较大,我们需要将不同雷达的数据进行处理和过滤,再