
用于自主机器人导航的感测认证装置、系统和方法.pdf

闪闪****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于自主机器人导航的感测认证装置、系统和方法.pdf
一种用于认证至少部分地导航自主移动机器人的传感器的装置、系统和方法。该装置可以包括至少一个机器人主体;至少一个光源,其驻留在所述机器人主体上接近所述感测相机,使得所述至少一个光源能够至少部分地照射所述感测相机的视场(FoV),其中所述至少一个光源具有与所述感测相机基本上匹配的特性;以及至少一个处理系统,其提供至少部分导航。所述至少一个处理系统可以执行以下步骤:在预定时间致动所述至少一个光源并持续预定持续时间;监测来自所述感测相机的数据以确认所述致动;基于所述监测,计算所述感测相机的延迟、吞吐量和反应度中的

机器人自主导航方法和装置.pdf
本发明涉及一种机器人自主导航方法和装置,该方法包括:接收机器人发送的任务目标;获取室内摄像头采集的图像信息,在图像信息中识别任务目标;对任务目标进行定位,计算任务目标的位置,根据任务目标的位置和机器人的位置规划运动路径;将规划后的运动路径返回至机器人,以使得机器人按照规划后的运动路径进行导航。采用本方法服务器通过室内摄像头能够从全局视角快速识别任务目标,不需要机器人盲目全面进行任务目标的搜索识别,所以使任务目标的识别更加高效。且服务器通过室内摄像头能够从全局视角实时、动态地响应任务目标的位置变化,从而根据
用于惯性导航系统的纠错方法、装置和系统.pdf
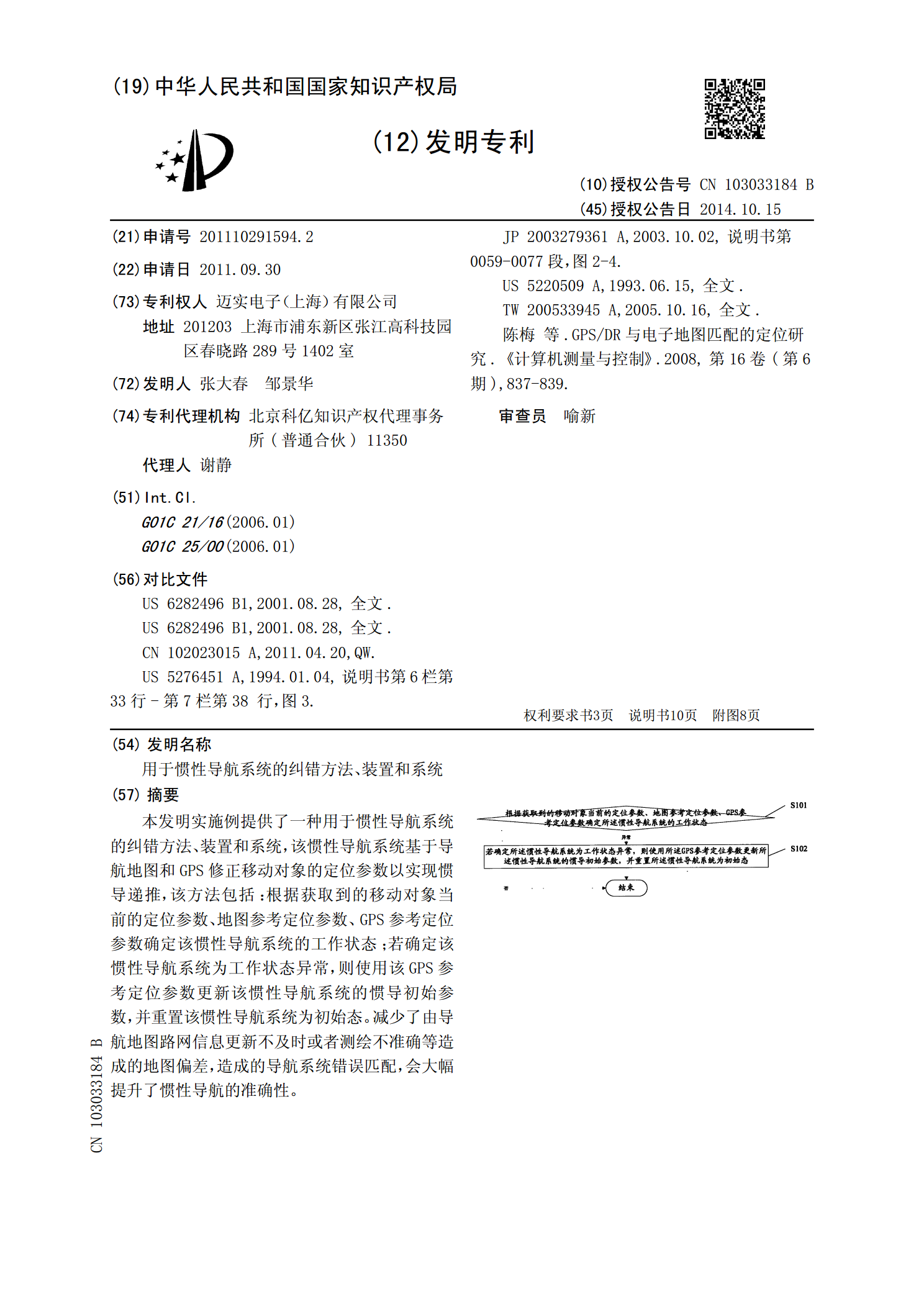
本发明实施例提供了一种用于惯性导航系统的纠错方法、装置和系统,该惯性导航系统基于导航地图和GPS修正移动对象的定位参数以实现惯导递推,该方法包括:根据获取到的移动对象当前的定位参数、地图参考定位参数、GPS参考定位参数确定该惯性导航系统的工作状态;若确定该惯性导航系统为工作状态异常,则使用该GPS参考定位参数更新该惯性导航系统的惯导初始参数,并重置该惯性导航系统为初始态。减少了由导航地图路网信息更新不及时或者测绘不准确等造成的地图偏差,造成的导航系统错误匹配,会大幅提升了惯性导航的准确性。
用于身份认证的方法、系统和装置.pdf
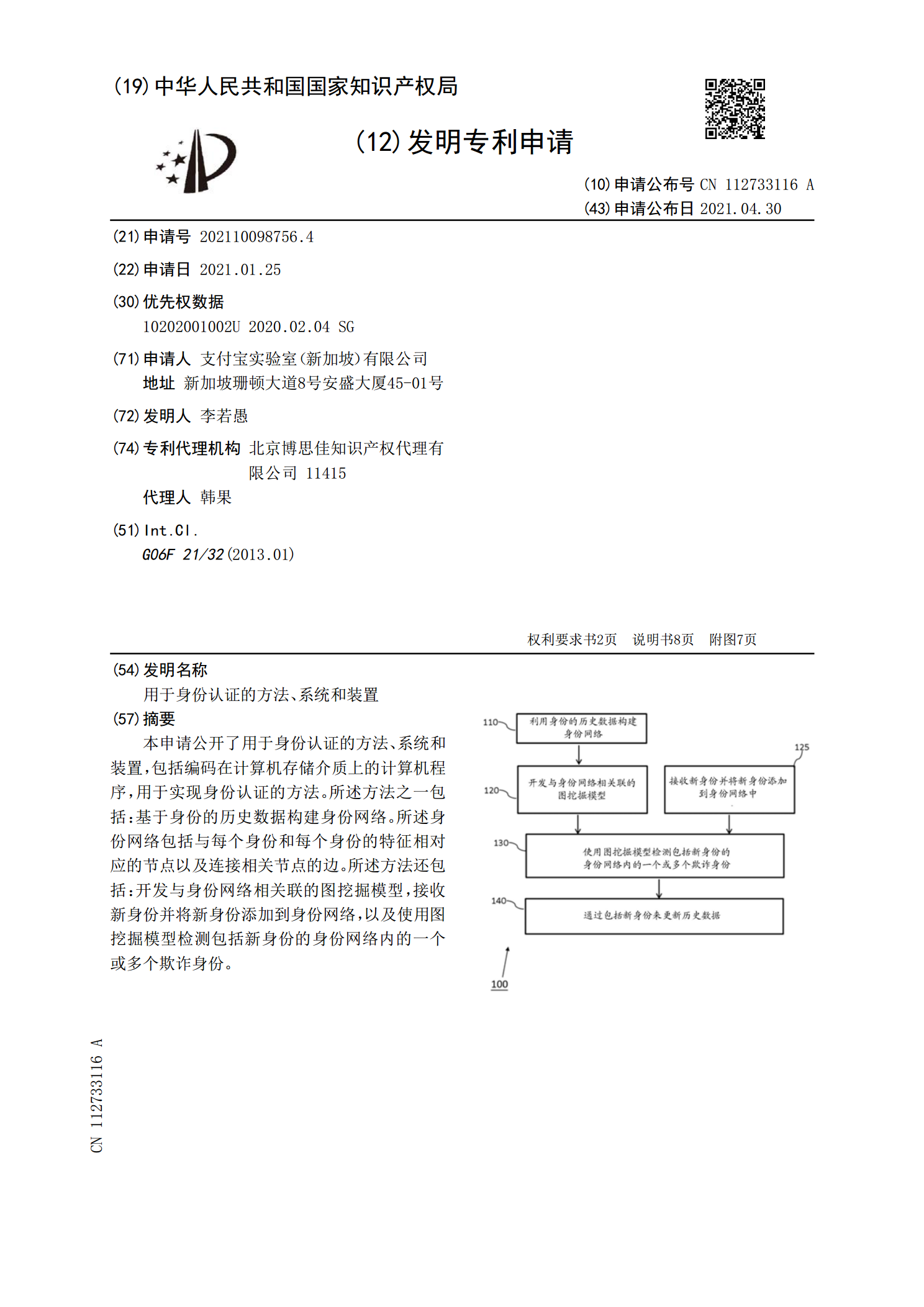
本申请公开了用于身份认证的方法、系统和装置,包括编码在计算机存储介质上的计算机程序,用于实现身份认证的方法。所述方法之一包括:基于身份的历史数据构建身份网络。所述身份网络包括与每个身份和每个身份的特征相对应的节点以及连接相关节点的边。所述方法还包括:开发与身份网络相关联的图挖掘模型,接收新身份并将新身份添加到身份网络,以及使用图挖掘模型检测包括新身份的身份网络内的一个或多个欺诈身份。

用于促进扩展场景中的导航的方法、装置和系统.pdf
一种促进朝向视频内容的扩展场景中的感兴趣区域导航的方法、装置和系统包括:确定时间线,所述时间线包括与视频内容中的至少一个感兴趣区域有关的信息;以及在当前显示的视频内容中显示视觉指示器,所述视觉指示器指示为了显示所述至少一个感兴趣区域而在视频内容中移动的方向。在本公开原理的一个实施例中,时间线附加到所述内容并携带与感兴趣的区域有关的随着时间而演变的信息。渲染器处理所述时间线,并且使用可用手段(比如图形表示、触觉信息或者几种手段的组合)向用户提供导航信息。