
一种基于图的正则化光场超分辨率方法和光场显微装置.pdf

宁馨****找我

1/10
2/10

3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图的正则化光场超分辨率方法和光场显微装置.pdf
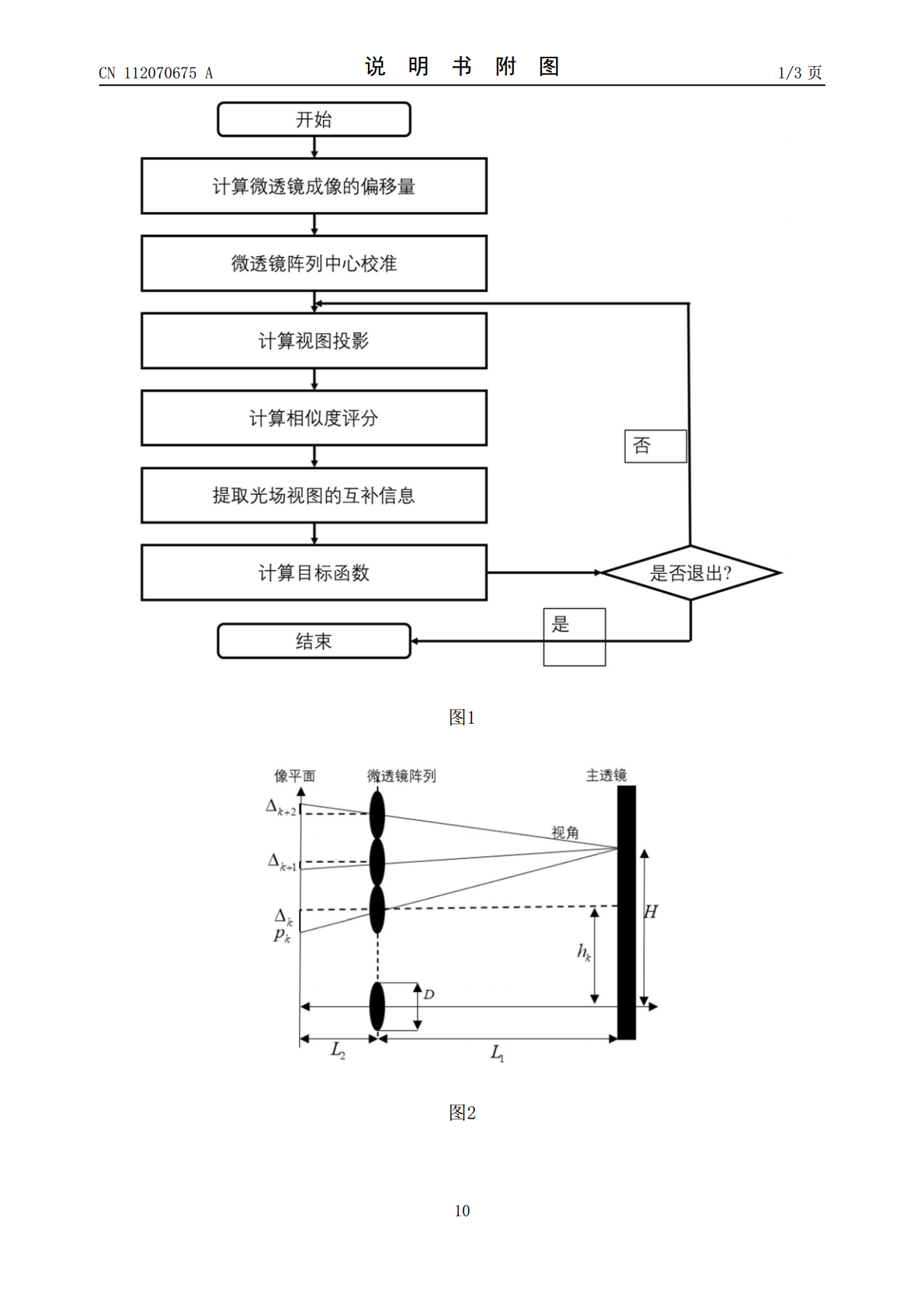
本发明提供了一种基于图的正则化光场超分辨率方法和光场显微装置,通过将光场的超分辨率问题转化为求解目标函数最小化的问题:建立光场图像的降质模型作为数据保真项;计算微透镜阵列的偏移量,标定微透镜阵列的中心位置;根据偏移量计算当前视图的像素点在其它视图上的投影,计算视图的像素点和对应的投影点的相似度评分;提取光场视图之间的互补信息,进行正则化平滑处理;最后利用正则化平滑,求解目标函数最小化时的高分辨率视图。实现了对所有视图进行超分辨率重构的功能,大幅度提升了所有视图的分辨率,并有效保留了光场结构。
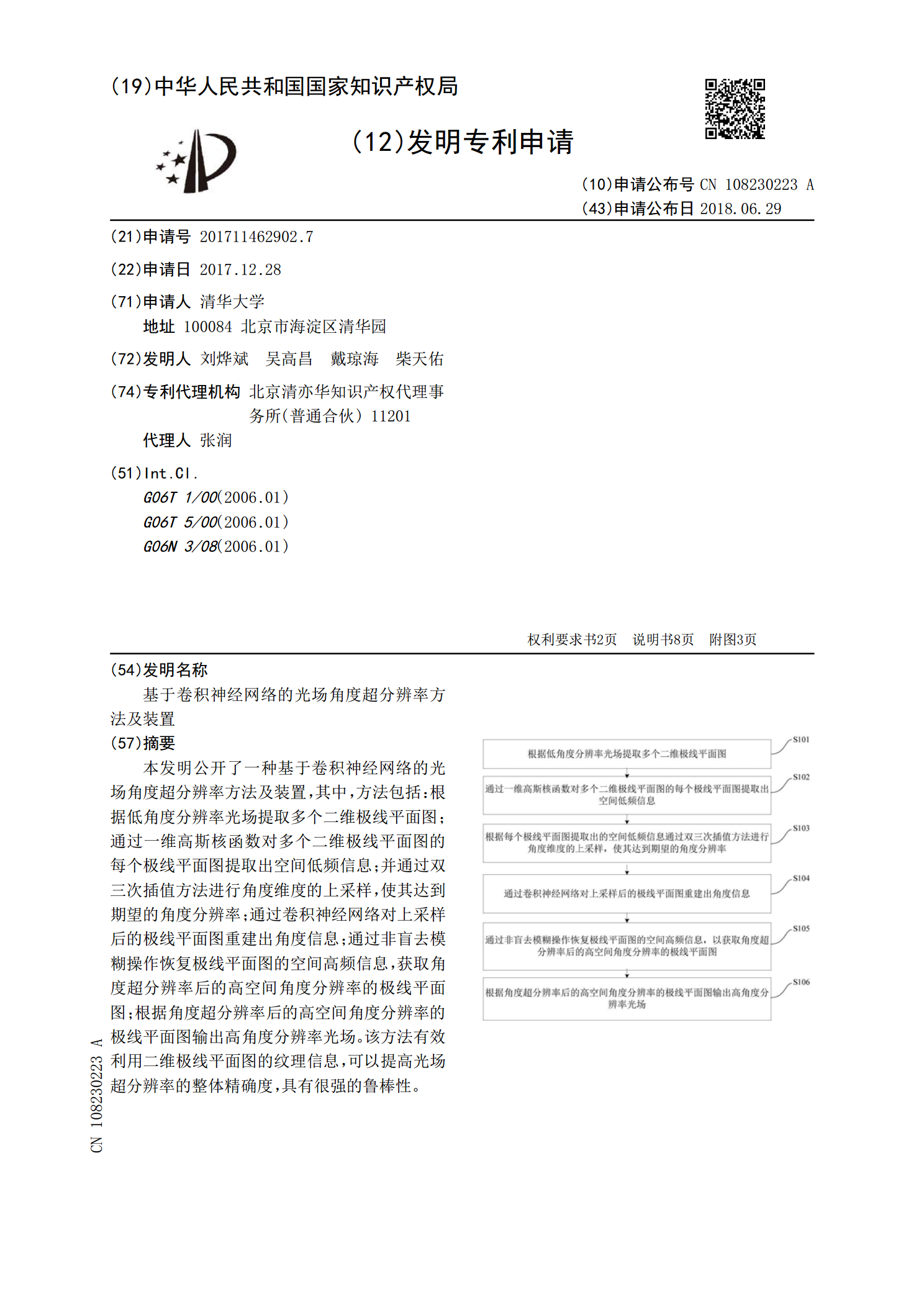
基于卷积神经网络的光场角度超分辨率方法及装置.pdf
本发明公开了一种基于卷积神经网络的光场角度超分辨率方法及装置,其中,方法包括:根据低角度分辨率光场提取多个二维极线平面图;通过一维高斯核函数对多个二维极线平面图的每个极线平面图提取出空间低频信息;并通过双三次插值方法进行角度维度的上采样,使其达到期望的角度分辨率;通过卷积神经网络对上采样后的极线平面图重建出角度信息;通过非盲去模糊操作恢复极线平面图的空间高频信息,获取角度超分辨率后的高空间角度分辨率的极线平面图;根据角度超分辨率后的高空间角度分辨率的极线平面图输出高角度分辨率光场。该方法有效利用二维极线平
一种基于光场显微系统的光场三维重建方法.pdf
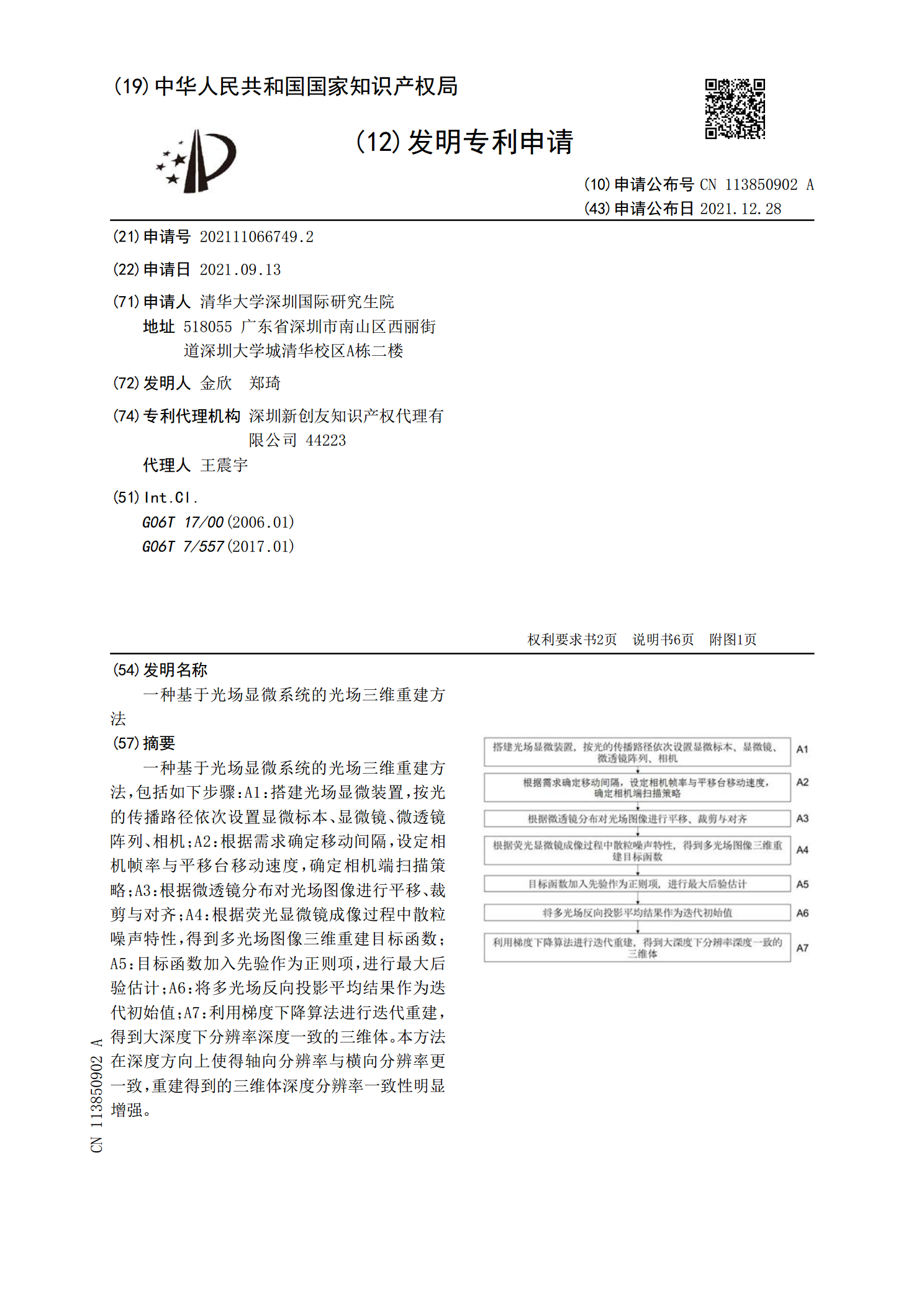
一种基于光场显微系统的光场三维重建方法,包括如下步骤:A1:搭建光场显微装置,按光的传播路径依次设置显微标本、显微镜、微透镜阵列、相机;A2:根据需求确定移动间隔,设定相机帧率与平移台移动速度,确定相机端扫描策略;A3:根据微透镜分布对光场图像进行平移、裁剪与对齐;A4:根据荧光显微镜成像过程中散粒噪声特性,得到多光场图像三维重建目标函数;A5:目标函数加入先验作为正则项,进行最大后验估计;A6:将多光场反向投影平均结果作为迭代初始值;A7:利用梯度下降算法进行迭代重建,得到大深度下分辨率深度一致的三维体

基于光场操控的远场超分辨显微机理及方法研究的中期报告.docx
基于光场操控的远场超分辨显微机理及方法研究的中期报告本次报告旨在介绍基于光场操控的远场超分辨显微机理及方法研究的中期进展。1.研究背景传统的光学显微镜受到衍射极限的限制,无法解析出高于衍射极限(约为半波长)的细节信息。而在生命科学等领域,高分辨率成像是至关重要的。因此,远场超分辨显微技术逐渐成为了当前研究的热点。目前常用的远场超分辨显微技术包括:激光光片显微术(PALM)、单分子局部化显微术(STORM)、受限光学多普勒分辨显微术(RESOLFT)、受限激发显微术(STED)等。这些技术基本上都依赖于荧光
一种改进的光场显微成像装置及构建方法.pdf
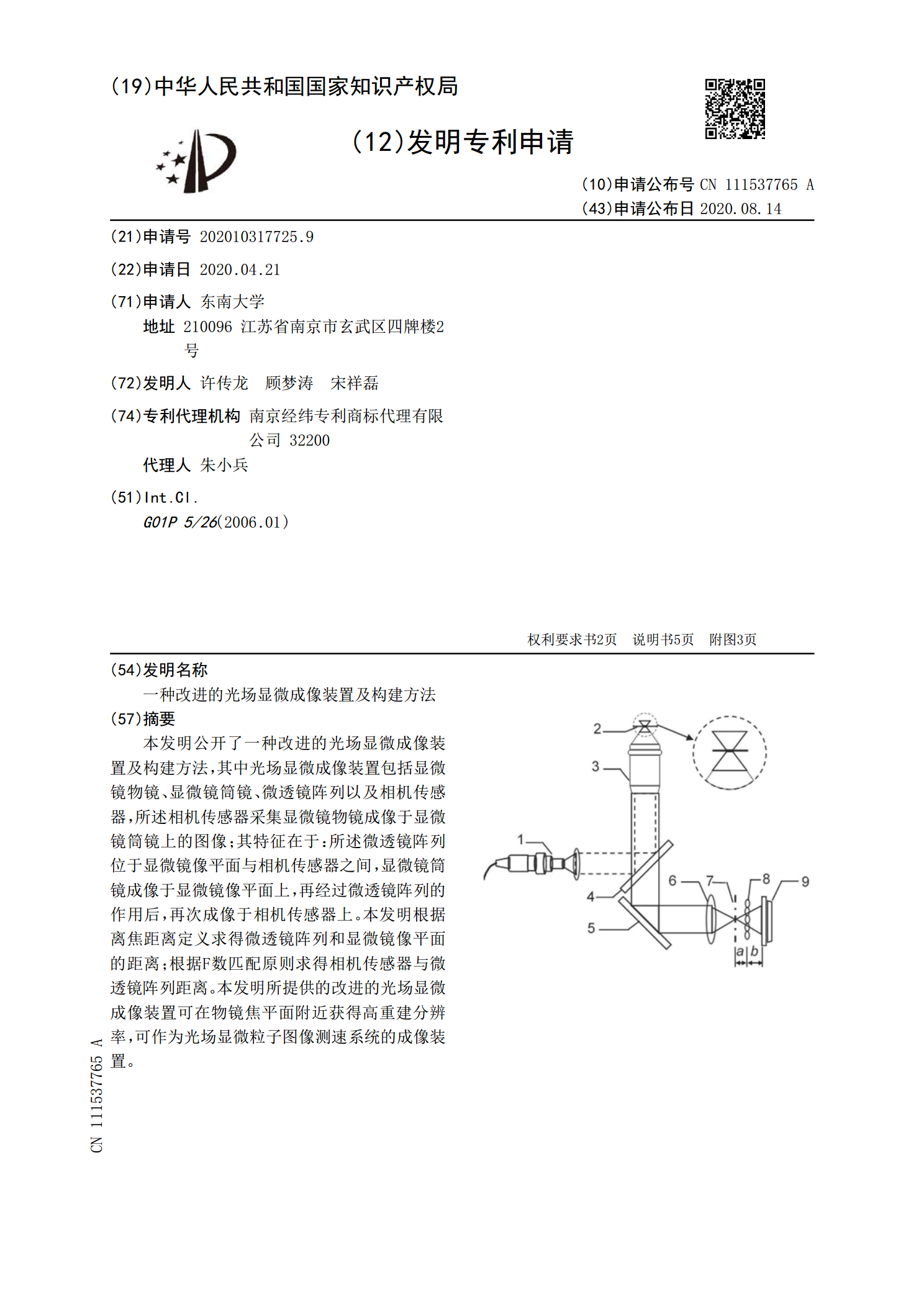
本发明公开了一种改进的光场显微成像装置及构建方法,其中光场显微成像装置包括显微镜物镜、显微镜筒镜、微透镜阵列以及相机传感器,所述相机传感器采集显微镜物镜成像于显微镜筒镜上的图像;其特征在于:所述微透镜阵列位于显微镜像平面与相机传感器之间,显微镜筒镜成像于显微镜像平面上,再经过微透镜阵列的作用后,再次成像于相机传感器上。本发明根据离焦距离定义求得微透镜阵列和显微镜像平面的距离;根据F数匹配原则求得相机传感器与微透镜阵列距离。本发明所提供的改进的光场显微成像装置可在物镜焦平面附近获得高重建分辨率,可作为光场显