
一种基于光场显微系统的光场三维重建方法.pdf

雨巷****珺琦


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于光场显微系统的光场三维重建方法.pdf
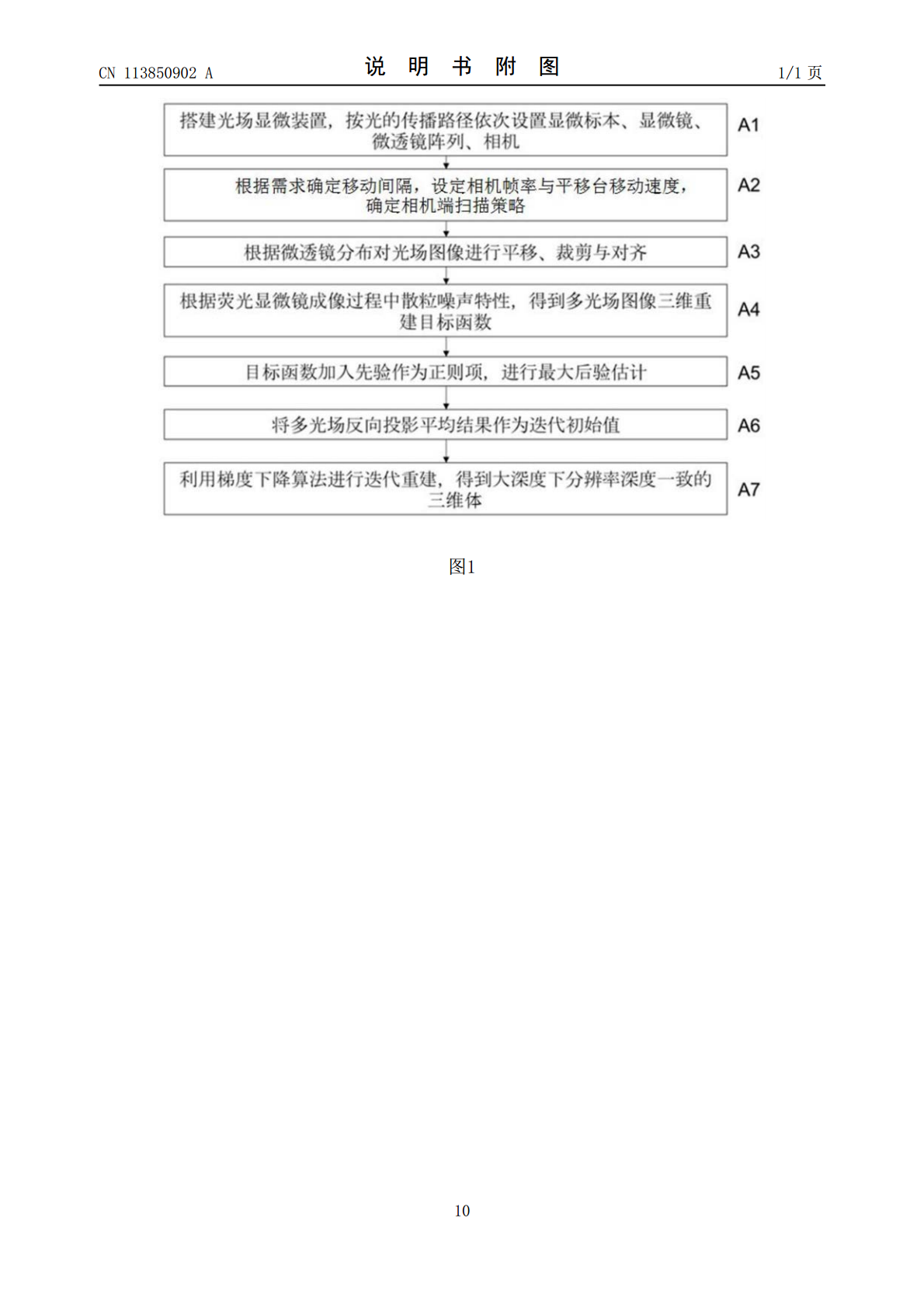
一种基于光场显微系统的光场三维重建方法,包括如下步骤:A1:搭建光场显微装置,按光的传播路径依次设置显微标本、显微镜、微透镜阵列、相机;A2:根据需求确定移动间隔,设定相机帧率与平移台移动速度,确定相机端扫描策略;A3:根据微透镜分布对光场图像进行平移、裁剪与对齐;A4:根据荧光显微镜成像过程中散粒噪声特性,得到多光场图像三维重建目标函数;A5:目标函数加入先验作为正则项,进行最大后验估计;A6:将多光场反向投影平均结果作为迭代初始值;A7:利用梯度下降算法进行迭代重建,得到大深度下分辨率深度一致的三维体

光场显微系统、光场显微镜及其光学组件.pdf
本发明提供了一种用于光场显微镜的光学组件,包括显微物镜;以及位于该显微物镜的后焦面处的微透镜阵列,该微透镜阵列包括多个微透镜,该多个微透镜用于将该显微物镜下的样品在不同视角下的实像投射至位于该光场显微镜像平面处的传感器上,其中,该多个微透镜之间留有间隙,且该间隙以遮光材料填充。

一种基于图的正则化光场超分辨率方法和光场显微装置.pdf
本发明提供了一种基于图的正则化光场超分辨率方法和光场显微装置,通过将光场的超分辨率问题转化为求解目标函数最小化的问题:建立光场图像的降质模型作为数据保真项;计算微透镜阵列的偏移量,标定微透镜阵列的中心位置;根据偏移量计算当前视图的像素点在其它视图上的投影,计算视图的像素点和对应的投影点的相似度评分;提取光场视图之间的互补信息,进行正则化平滑处理;最后利用正则化平滑,求解目标函数最小化时的高分辨率视图。实现了对所有视图进行超分辨率重构的功能,大幅度提升了所有视图的分辨率,并有效保留了光场结构。

光场成像系统以及通过光场成像系统采集光场信息的方法.pdf
本发明涉及光学成像技术领域,公开了一种光场成像系统以及通过光场成像系统采集光场信息的方法。本发明中的光场成像系统包括:光源装置、主透镜、滤光装置、超构透镜阵列、图像传感器以及主控装置;光源装置用于释放主透镜可接收的光线;滤光装置设置在超构透镜之前的光路中,用于选择性地使多种不同预设波长范围的光线通过;超构透镜阵列用于处理通过了主透镜与滤光装置的光线;图像传感器用于接收超构透镜阵列所产生的成像信号;主控装置与图像传感器电连接,用于控制拍摄与成像。该光场成像系统在不大幅度增加技术难度和成本的情况下,解决了光场

基于光场数据的三维重建.docx
基于光场数据的三维重建基于光场数据的三维重建摘要:近年来,随着光场摄影技术的快速发展,基于光场数据的三维重建成为了一个热门研究领域。光场数据具有丰富的深度信息和角度信息,可以用来实现高质量的三维重建。本文首先介绍了光场摄影的基本原理和光场数据的特点,然后综述了目前基于光场数据的三维重建方法,并分析了各种方法的优缺点。最后,展望了未来基于光场数据的三维重建的发展趋势。关键词:光场摄影,光场数据,三维重建,深度信息,角度信息1.引言光场摄影是一种通过记录光线进入相机的方向和强度分布来捕捉现实世界的技术。与传统