
一种基于六元锥矢量阵的水声目标降维匹配声场定位方法.pdf

高格****gu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于六元锥矢量阵的水声目标降维匹配声场定位方法.pdf
本发明涉及一种基于六元锥矢量阵的水声目标降维匹配声场定位方法,属于水声目标定位技术领域。本发明利用六元锥矢量阵,可获得关于声源的方位角、俯仰角、深度以及水平距离的完备信息,且利用逐次获得的估计信息对最终的水平距离估计进行降维处理,通过空间扫描降维有效提高了估计效率。本发明利用最小规模立体阵—六元锥矢量阵,既具有全空域定位能力,又具有优于线列阵和平面阵的定位精度,同时还保留立体阵的空域分维特性优势,具有良好的对称性和平稳性。
一种垂直矢量阵水下声线匹配被动定位方法.pdf
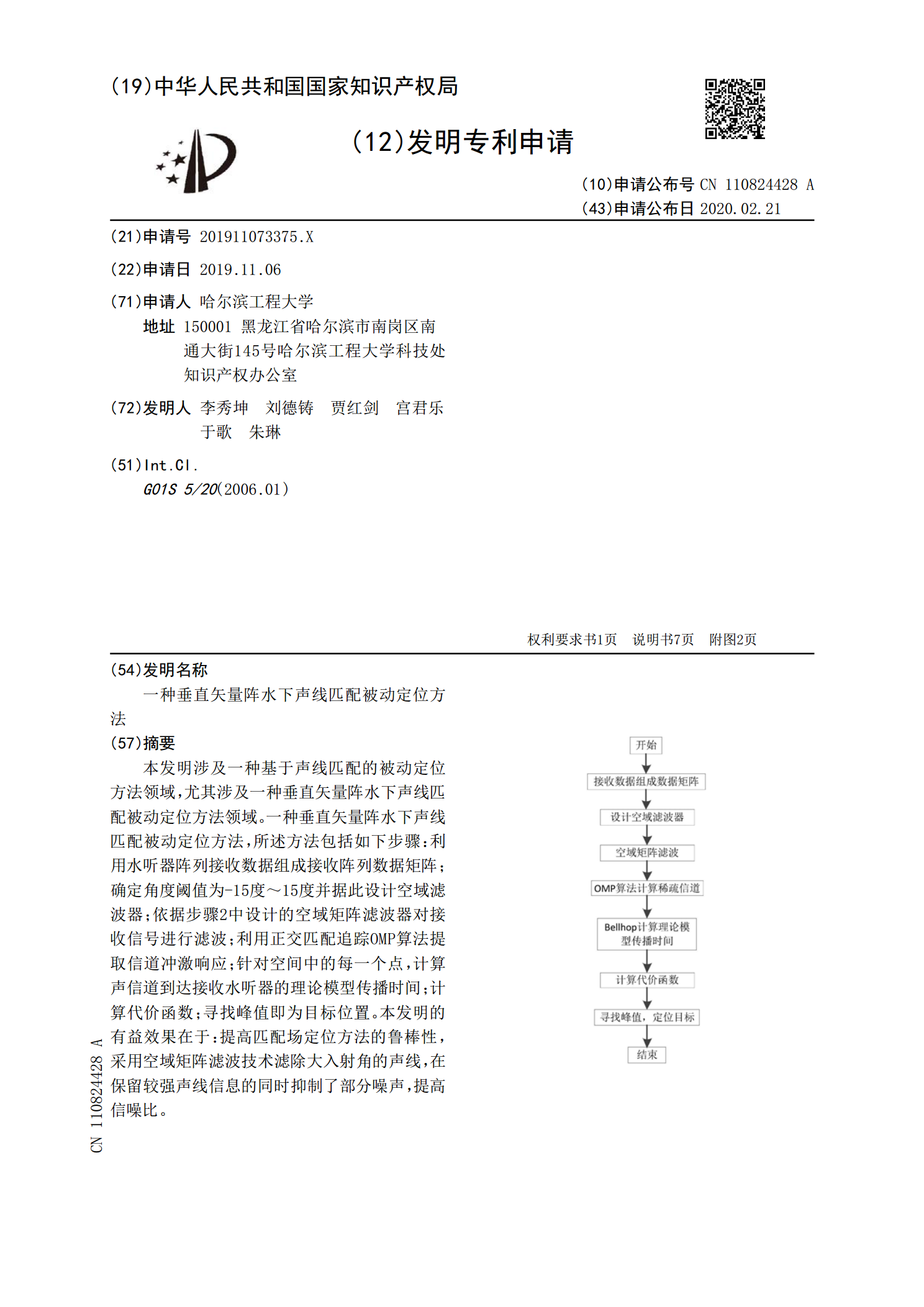
本发明涉及一种基于声线匹配的被动定位方法领域,尤其涉及一种垂直矢量阵水下声线匹配被动定位方法领域。一种垂直矢量阵水下声线匹配被动定位方法,所述方法包括如下步骤:利用水听器阵列接收数据组成接收阵列数据矩阵;确定角度阈值为‑15度~15度并据此设计空域滤波器;依据步骤2中设计的空域矩阵滤波器对接收信号进行滤波;利用正交匹配追踪OMP算法提取信道冲激响应;针对空间中的每一个点,计算声信道到达接收水听器的理论模型传播时间;计算代价函数;寻找峰值即为目标位置。本发明的有益效果在于:提高匹配场定位方法的鲁棒性,采用空

应用匹配场实现矢量水平阵的三维定位.docx
应用匹配场实现矢量水平阵的三维定位矢量水平阵的三维定位是一种基于场景匹配的定位方法,在很多实际应用中具有重要意义。本论文旨在探讨矢量水平阵的三维定位技术的原理、算法及应用,并分析其在实际场景中的优势和挑战。一、引言现代社会对定位技术的需求越来越高,矢量水平阵的三维定位作为一种新的定位方法,引起了广泛的关注。该方法通过使用多个传感器构成的矢量水平阵,通过匹配场实现对目标物体的三维定位。与传统的单一传感器定位方法相比,矢量水平阵的三维定位具有更高的定位精度和更强的抗干扰能力。二、矢量水平阵的三维定位原理矢量水
一种基于矢量阵接收的MIMO高速水声通信方法.pdf
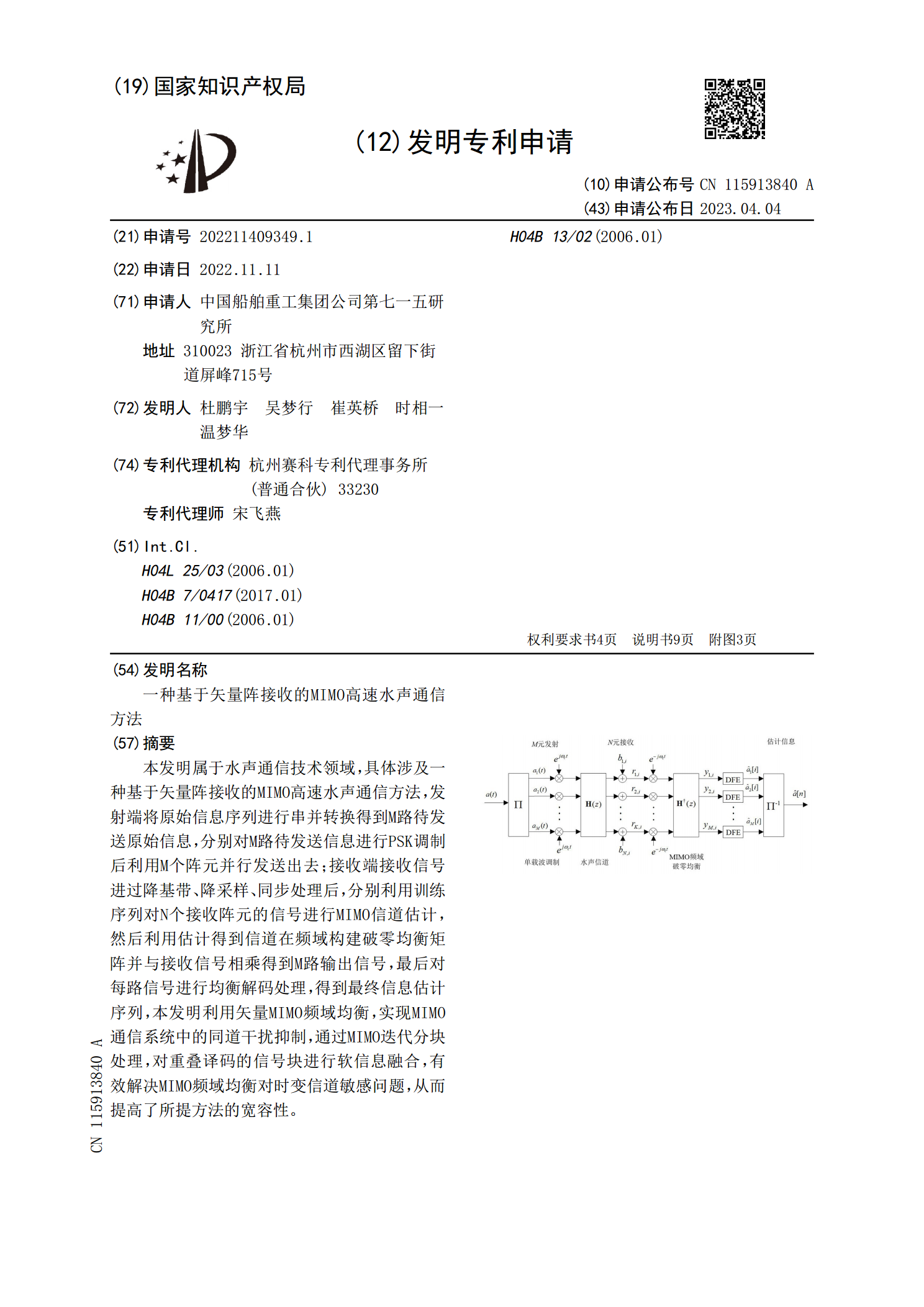
本发明属于水声通信技术领域,具体涉及一种基于矢量阵接收的MIMO高速水声通信方法,发射端将原始信息序列进行串并转换得到M路待发送原始信息,分别对M路待发送信息进行PSK调制后利用M个阵元并行发送出去;接收端接收信号进过降基带、降采样、同步处理后,分别利用训练序列对N个接收阵元的信号进行MIMO信道估计,然后利用估计得到信道在频域构建破零均衡矩阵并与接收信号相乘得到M路输出信号,最后对每路信号进行均衡解码处理,得到最终信息估计序列,本发明利用矢量MIMO频域均衡,实现MIMO通信系统中的同道干扰抑制,通过M

匹配场处理分布式多阵水下目标三维定位方法.docx
匹配场处理分布式多阵水下目标三维定位方法匹配场处理分布式多阵水下目标三维定位方法摘要:随着水下目标探测与定位技术的发展,为了提高水下目标的定位精度和准确度,匹配场成为一种被广泛研究和应用的方法。本文将介绍匹配场处理分布式多阵水下目标三维定位方法的原理、算法和实验结果。通过实验数据和分析,验证了该方法在水下目标定位方面的优越性和可行性。1.引言水下目标的定位是水下勘探和海洋工程领域中的重要研究方向。传统的水下目标定位方法往往受到水下环境复杂性的限制,如水质、海流等因素对声波传播的影响。因此,研究人员提出了各