
鱼眼图像畸变矫正方法、装置和虚拟显示系统.pdf

子璇****君淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共38页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

鱼眼图像畸变矫正方法、装置和虚拟显示系统.pdf
本公开提供了一种鱼眼图像畸变矫正方法、装置和虚拟显示系统,涉及计算机视觉技术领域。包括:当对图像进行矫正时,获取第一鱼眼相机拍摄的第一图像;根据第一投影映射关系,将该第一图像中的像素点投影到多个第一虚拟视点相机的成像平面上,得到多个第一虚拟视点图像;将该多个第一虚拟视点图像拼接成该第一图像矫正后的第二图像。通过该多个第一虚拟视点相机可以得到该第一图像矫正后的第二图像。由于该多个第一虚拟视点相机的视域范围覆盖该第一鱼眼相机的视域范围,因此,通过该多个第一虚拟视点相机得到第一图像的矫正图像时,无需截取第一图像
鱼眼畸变矫正软件系统.docx
fisheye畸变矫正软件系统-西安冉科信息技术有限公司技术目标:鱼眼镜头的突出特点是一次性摄入185°视角内所有的信息,无盲区,无须考虑图像拼合和嵌接等问题。但鱼眼图像具有非常严重的畸变,如果要利用这些具有严重变形图像的信息,就需将这些变形图像校正为人们所习惯的透视投影图像。本系统可以实现展开任意方向轴上的“展开窗口”,对图像中敏感信息的抓取具有积极效果。它的展开效果消除了其它恢复方法边缘“拉扯”的现象,在边缘也可以得到接近现实世界的效果。最终的实验结果表明,此算法具有流程简单、速度快、效果好、实用性强
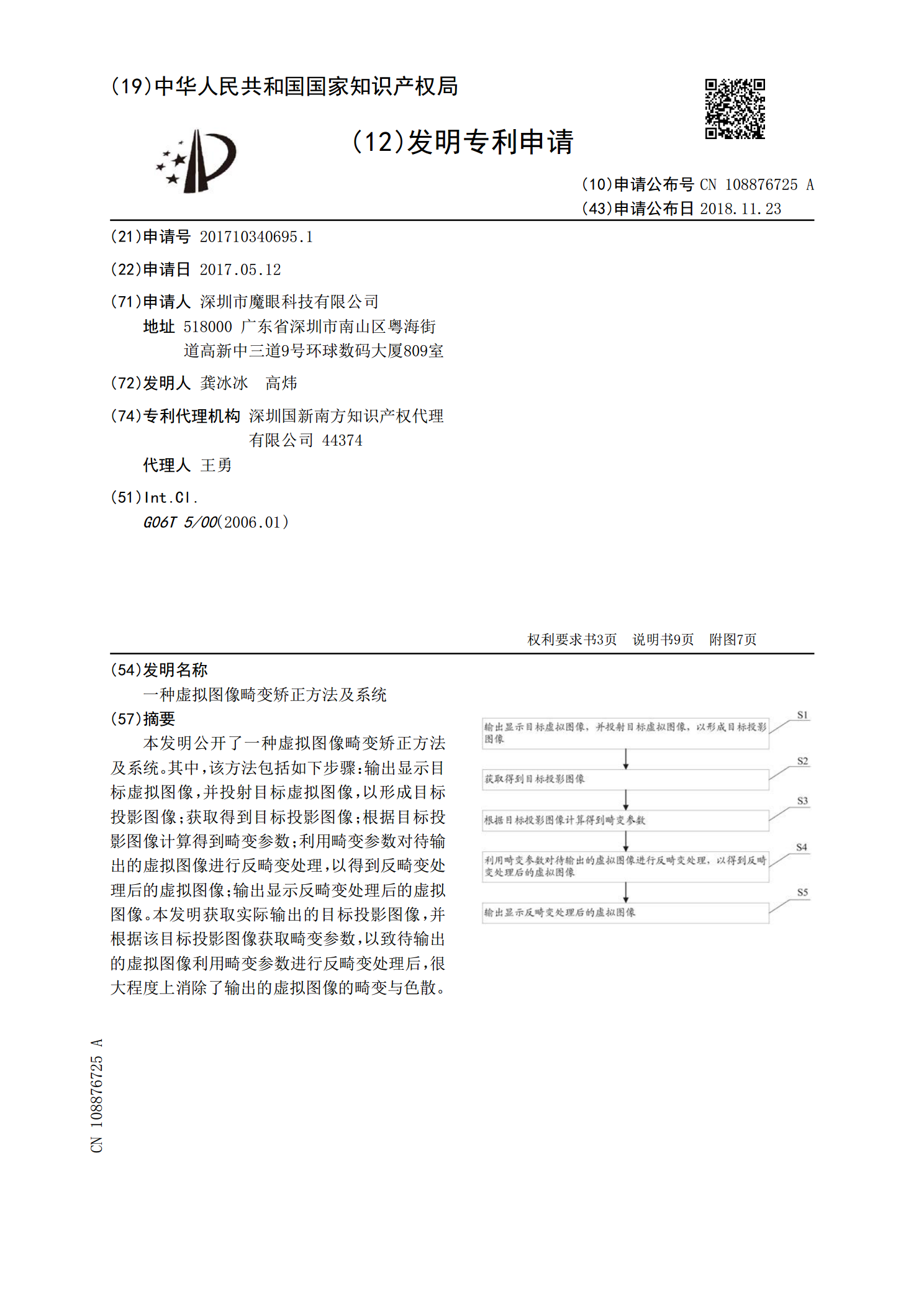
一种虚拟图像畸变矫正方法及系统.pdf
本发明公开了一种虚拟图像畸变矫正方法及系统。其中,该方法包括如下步骤:输出显示目标虚拟图像,并投射目标虚拟图像,以形成目标投影图像;获取得到目标投影图像;根据目标投影图像计算得到畸变参数;利用畸变参数对待输出的虚拟图像进行反畸变处理,以得到反畸变处理后的虚拟图像;输出显示反畸变处理后的虚拟图像。本发明获取实际输出的目标投影图像,并根据该目标投影图像获取畸变参数,以致待输出的虚拟图像利用畸变参数进行反畸变处理后,很大程度上消除了输出的虚拟图像的畸变与色散。
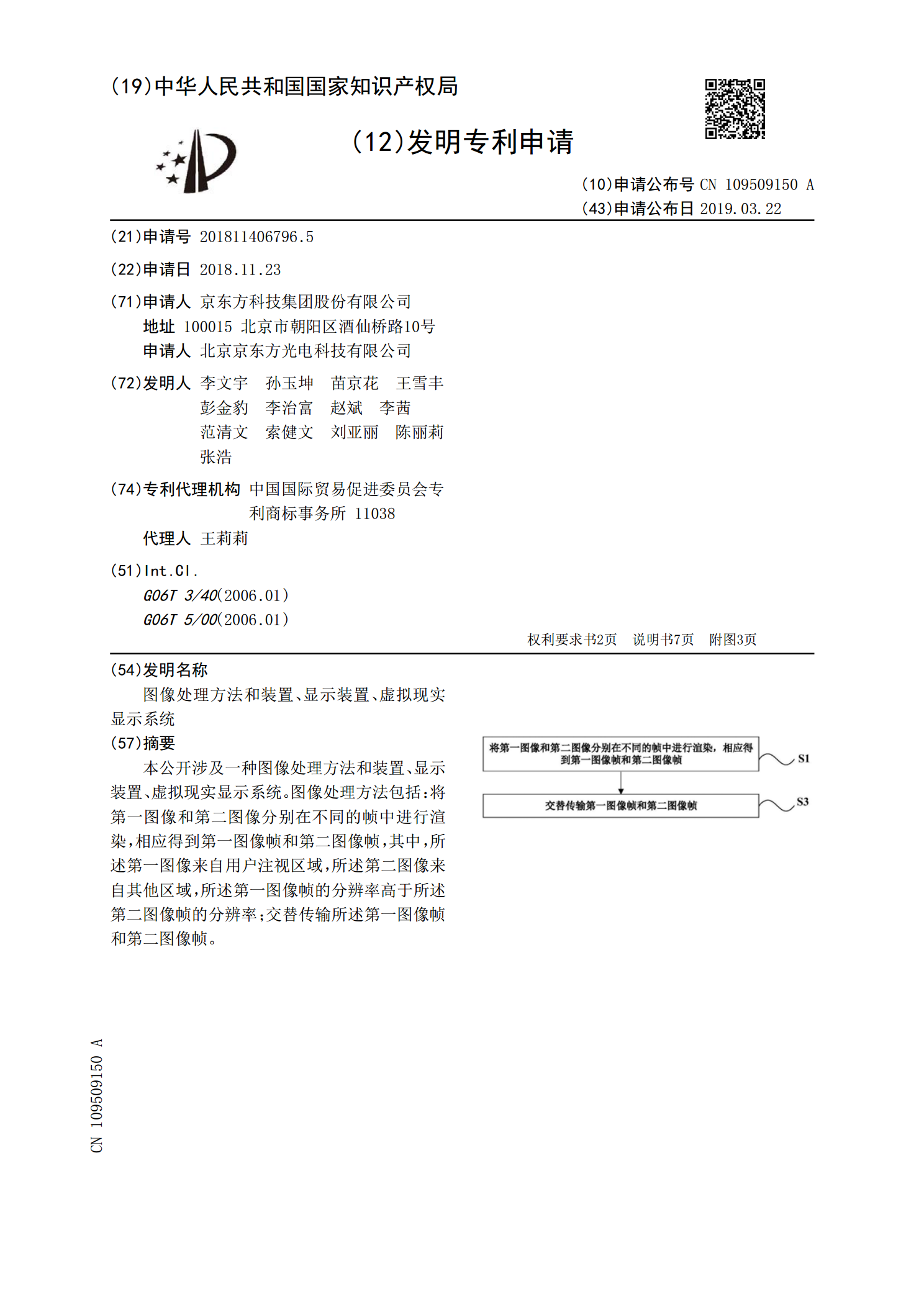
图像处理方法和装置、显示装置、虚拟现实显示系统.pdf
本公开涉及一种图像处理方法和装置、显示装置、虚拟现实显示系统。图像处理方法包括:将第一图像和第二图像分别在不同的帧中进行渲染,相应得到第一图像帧和第二图像帧,其中,所述第一图像来自用户注视区域,所述第二图像来自其他区域,所述第一图像帧的分辨率高于所述第二图像帧的分辨率;交替传输所述第一图像帧和第二图像帧。
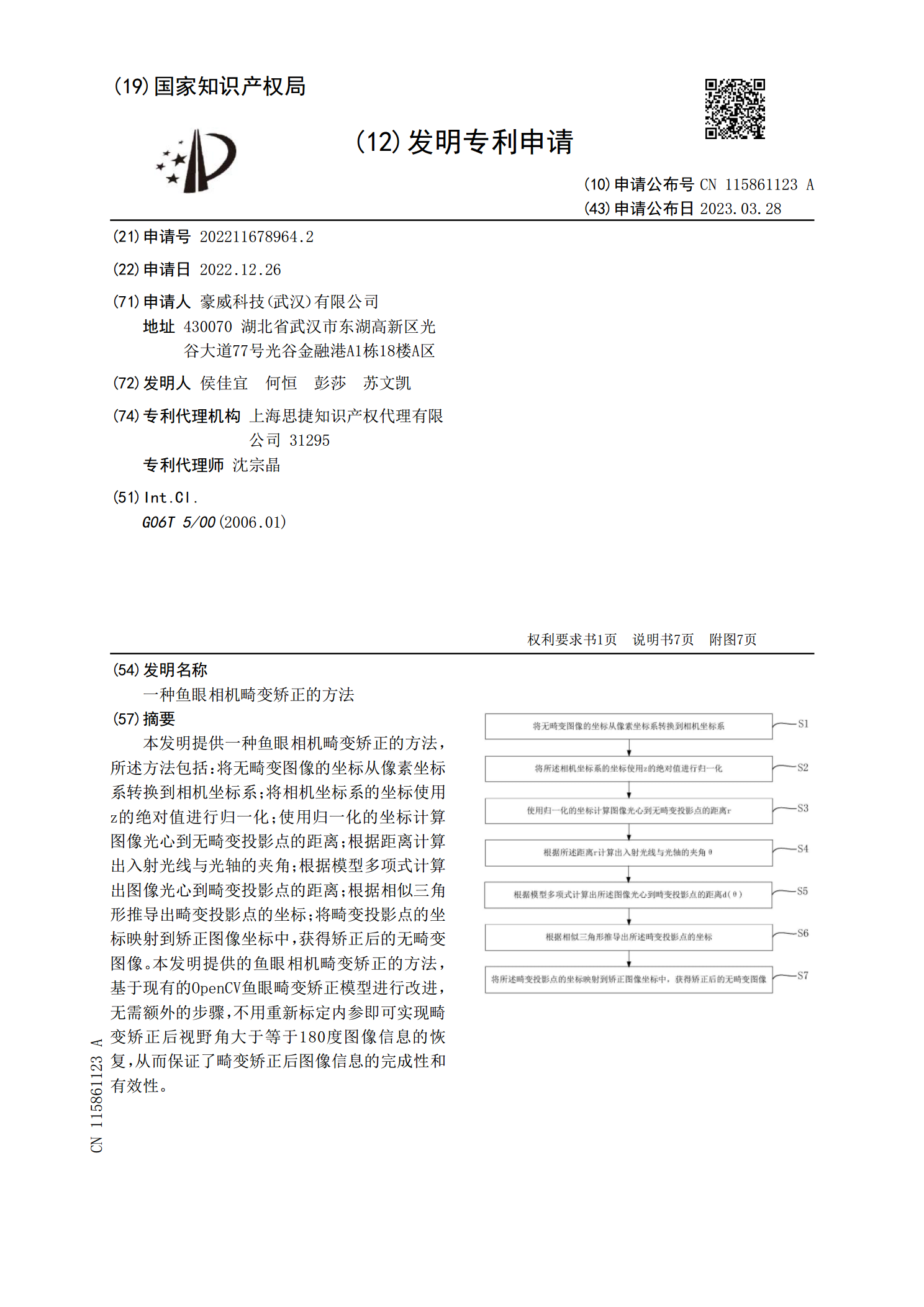
一种鱼眼相机畸变矫正的方法.pdf
本发明提供一种鱼眼相机畸变矫正的方法,所述方法包括:将无畸变图像的坐标从像素坐标系转换到相机坐标系;将相机坐标系的坐标使用z的绝对值进行归一化;使用归一化的坐标计算图像光心到无畸变投影点的距离;根据距离计算出入射光线与光轴的夹角;根据模型多项式计算出图像光心到畸变投影点的距离;根据相似三角形推导出畸变投影点的坐标;将畸变投影点的坐标映射到矫正图像坐标中,获得矫正后的无畸变图像。本发明提供的鱼眼相机畸变矫正的方法,基于现有的OpenCV鱼眼畸变矫正模型进行改进,无需额外的步骤,不用重新标定内参即可实现畸变矫