
基于Radon变换与机器学习的视频合成孔径雷达动目标亮线检测方法.pdf

琰琬****买买


1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于Radon变换与机器学习的视频合成孔径雷达动目标亮线检测方法.pdf
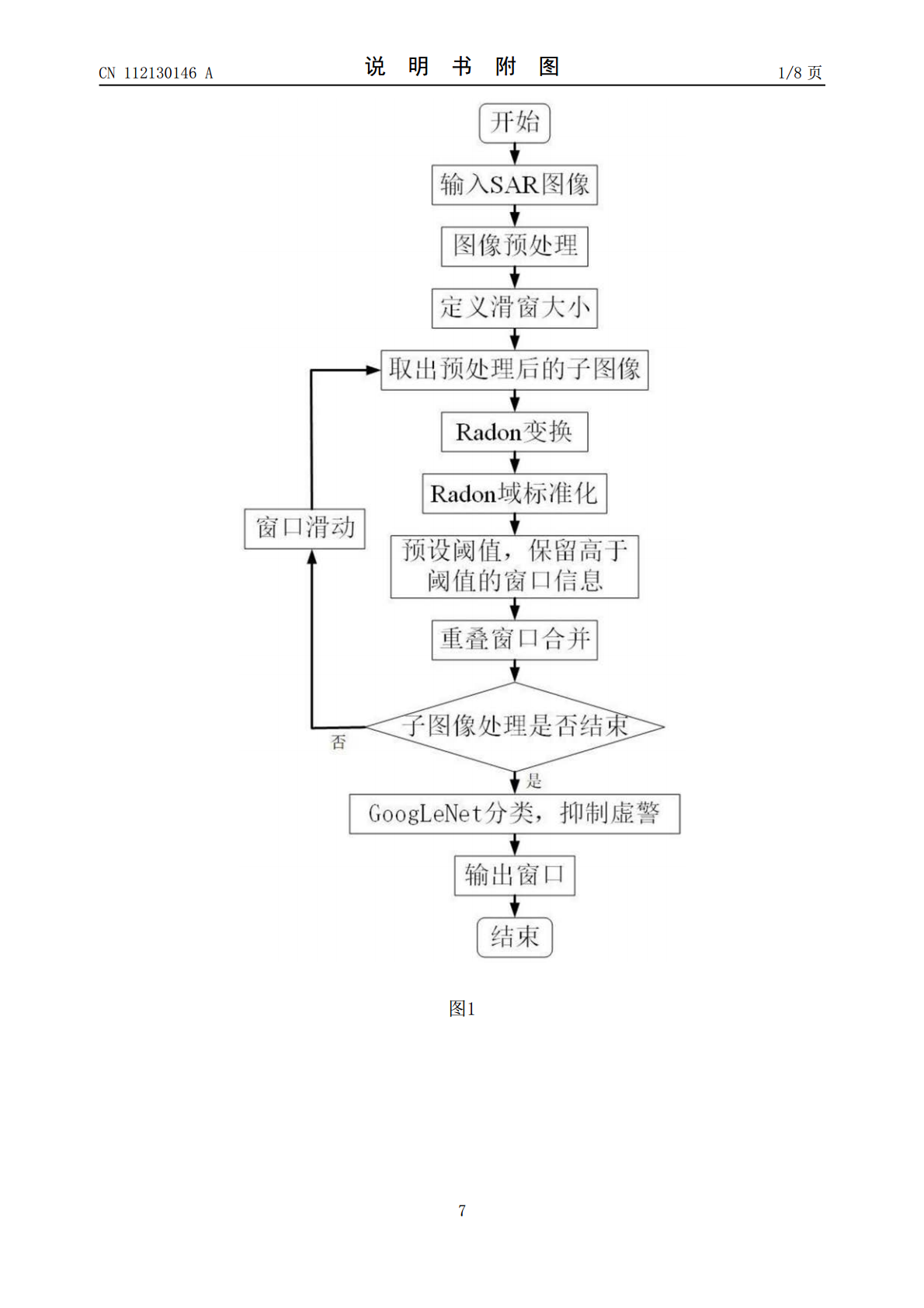
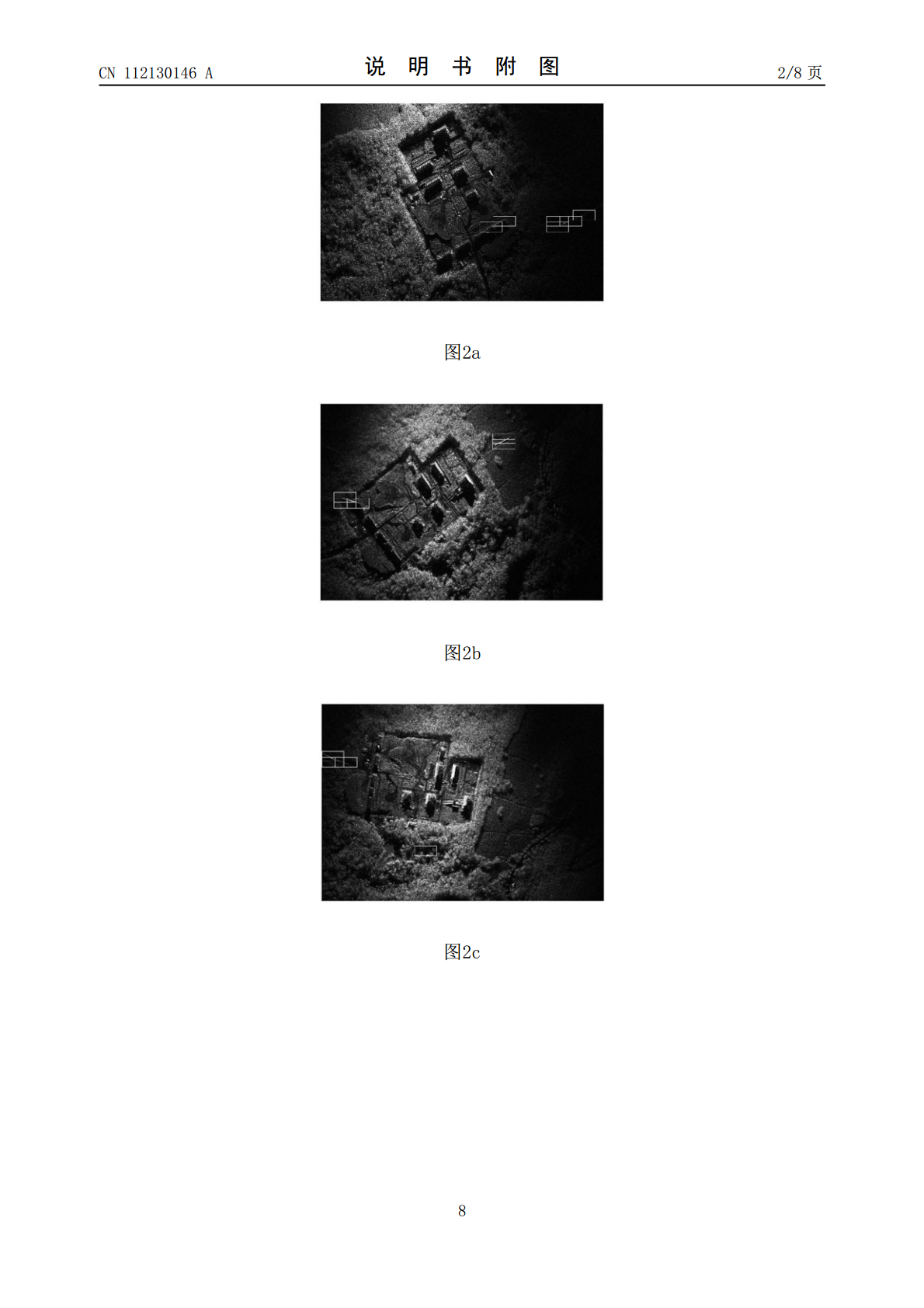
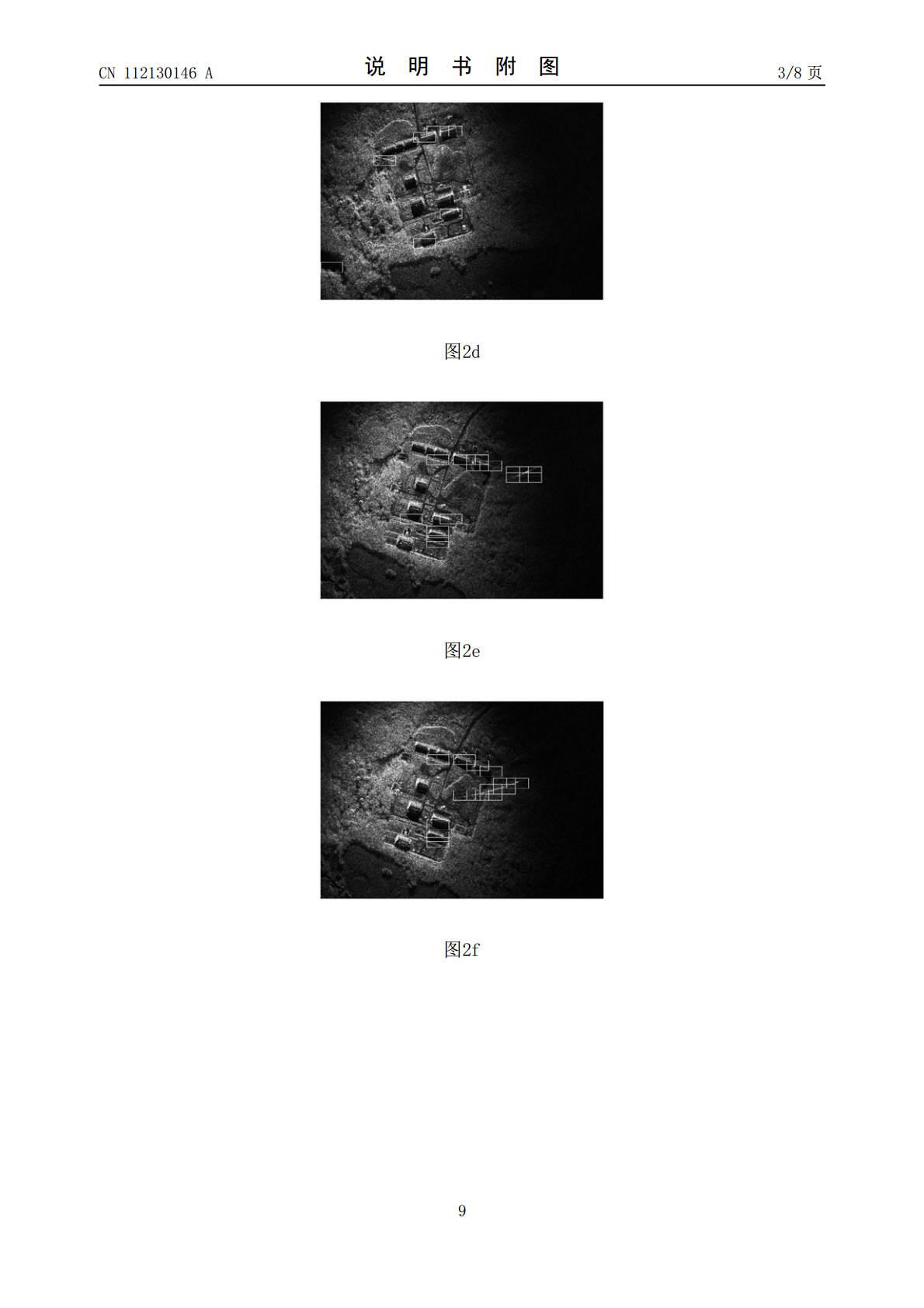
本发明提供了一种基于Radon变换与机器学习的视频合成孔径雷达动目标亮线检测方法,包括图像预处理、Radon变换及标准化、判断保留窗口几何信息、合并重叠窗口、遍历所有图像、截取原图像并训练GoogLeNet网络模型、采用训练好的GoogLeNet网络模型抑制虚警。本发明利用Radon变换进行初步检测,然后通过GoogLeNet网络模型抑制虚警,具有检测精度高,简单易实现的特点。

基于Radon变换的Deramp-STAP动目标检测方法.pdf
本发明公开了一种基于Radon变换的Deramp‑STAP动目标检测方法,该方法通过在Deramp‑STAP方法的基础上引入Radon变换获得动目标的等效相对速度,利用已得到的等效相对速度,校正动目标的线性距离走动,并且缩小在杂波抑制过程中所需处理的CFT多普勒频率范围,最后利用STAP方法实现对动目标的准确检测。本发明不仅克服了传统SAR‑GMTI检测方法要求雷达成像系统的通道数必须大于两倍方位多普勒模糊数的限制,还解决了以往基于Deramp‑STAP动目标检测方法运算量较大的问题。
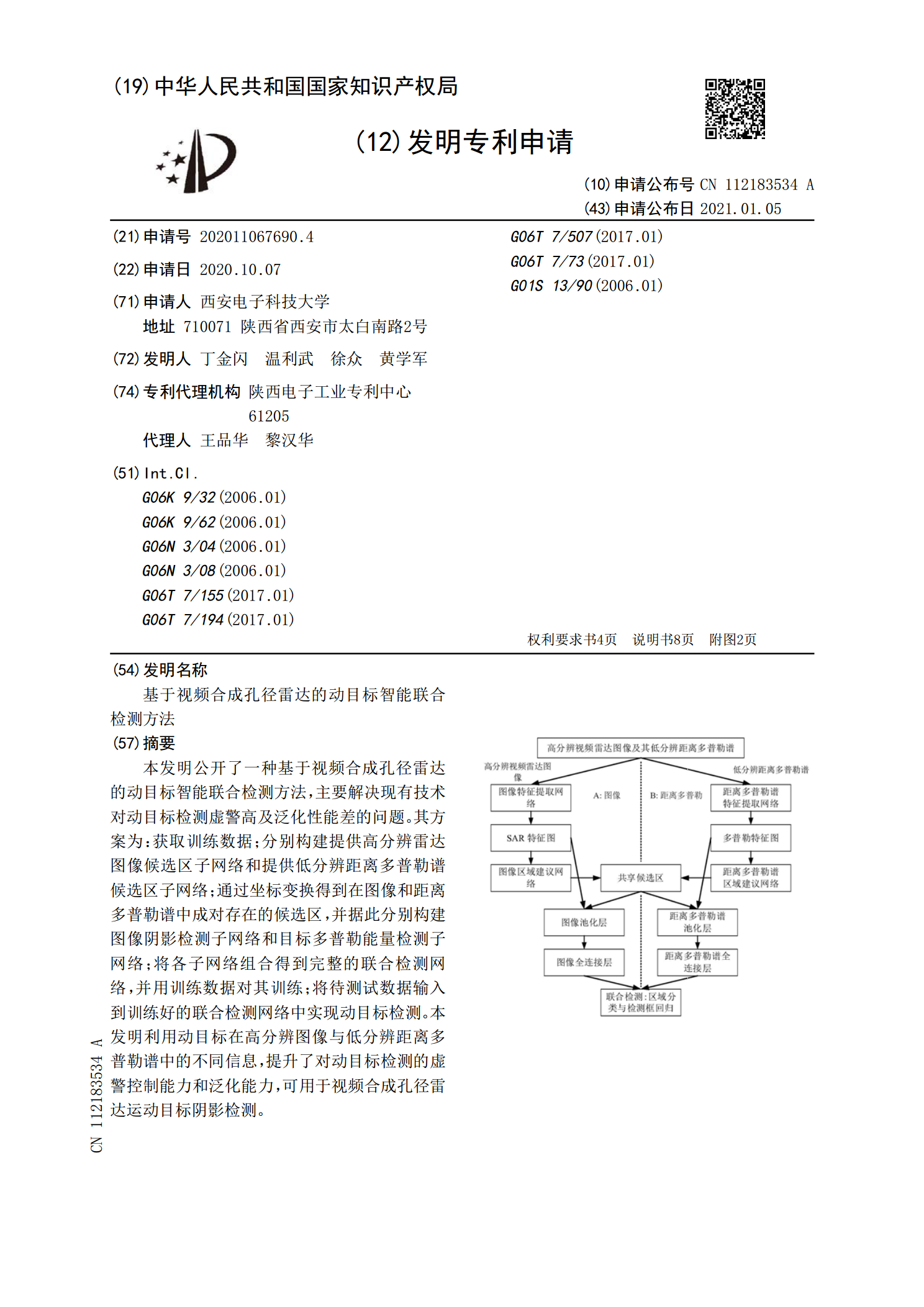
基于视频合成孔径雷达的动目标智能联合检测方法.pdf
本发明公开了一种基于视频合成孔径雷达的动目标智能联合检测方法,主要解决现有技术对动目标检测虚警高及泛化性能差的问题。其方案为:获取训练数据;分别构建提供高分辨雷达图像候选区子网络和提供低分辨距离多普勒谱候选区子网络;通过坐标变换得到在图像和距离多普勒谱中成对存在的候选区,并据此分别构建图像阴影检测子网络和目标多普勒能量检测子网络;将各子网络组合得到完整的联合检测网络,并用训练数据对其训练;将待测试数据输入到训练好的联合检测网络中实现动目标检测。本发明利用动目标在高分辨图像与低分辨距离多普勒谱中的不同信息,

基于局部标准差和Radon变换的目标检测方法.pdf
本发明公开了一种基于局部标准差和拉东Radon变换的目标检测方法。其步骤为:(1)输入待检测彩色图像;(2)图像预处理;(3)获得不同灰度背景轮廓图像;(4)差分运算;(5)拉东Radon变换;(6)修正极大值曲线;(7)拉东Radon逆变换;(8)输出目标检测结果。本发明能够很好的解决现有技术中存在的算法复杂度太高,以及在点目标相对弱小时,容易在目标周围产生虚警点的缺陷,本发明提高了图像目标检测的效率和准确性。
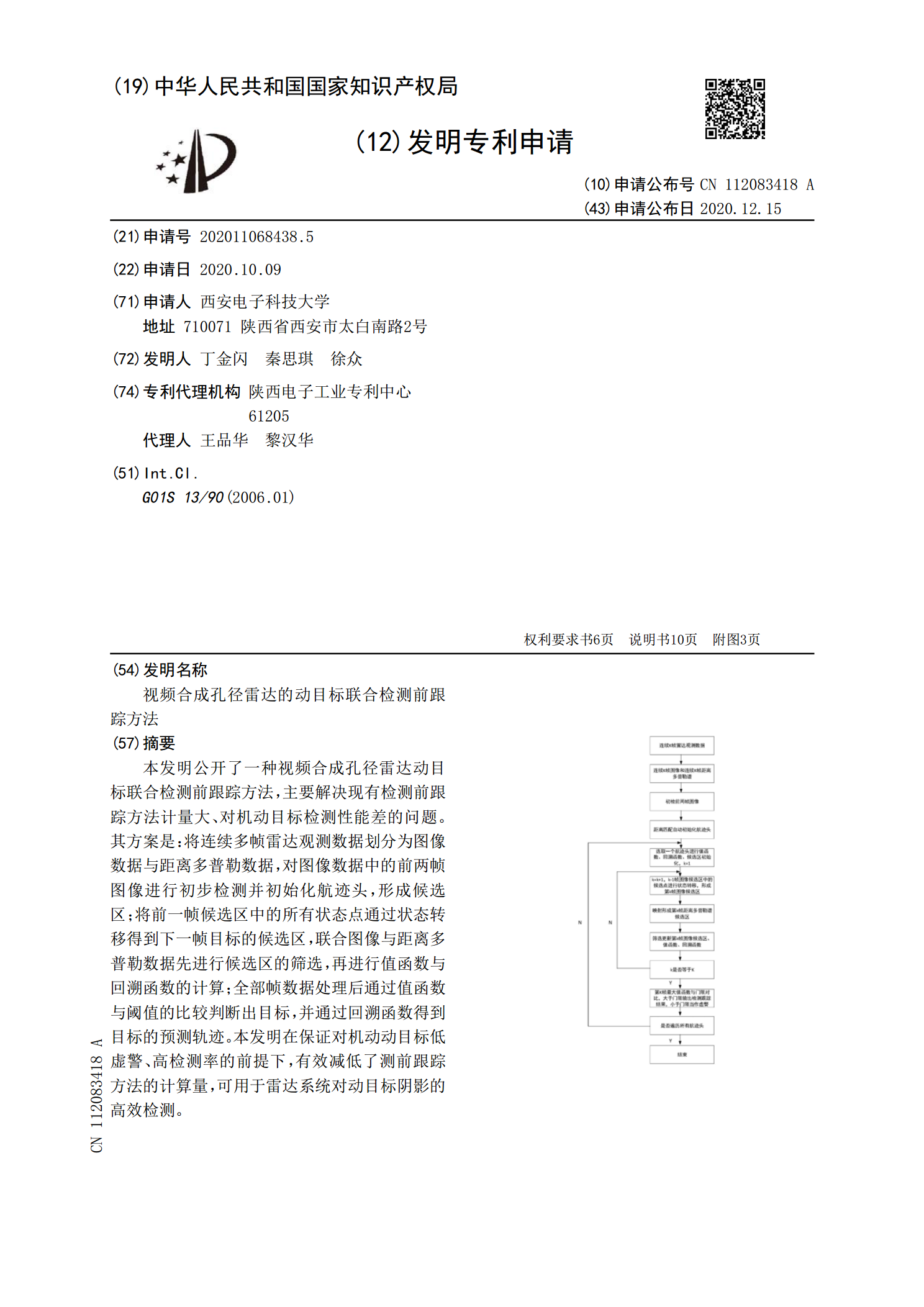
视频合成孔径雷达的动目标联合检测前跟踪方法.pdf
本发明公开了一种视频合成孔径雷达动目标联合检测前跟踪方法,主要解决现有检测前跟踪方法计量大、对机动目标检测性能差的问题。其方案是:将连续多帧雷达观测数据划分为图像数据与距离多普勒数据,对图像数据中的前两帧图像进行初步检测并初始化航迹头,形成候选区;将前一帧候选区中的所有状态点通过状态转移得到下一帧目标的候选区,联合图像与距离多普勒数据先进行候选区的筛选,再进行值函数与回溯函数的计算;全部帧数据处理后通过值函数与阈值的比较判断出目标,并通过回溯函数得到目标的预测轨迹。本发明在保证对机动动目标低虚警、高检测率