
基于场景分析的车辆检测方法及系统.pdf

猫巷****永安


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于场景分析的车辆检测方法及系统.pdf
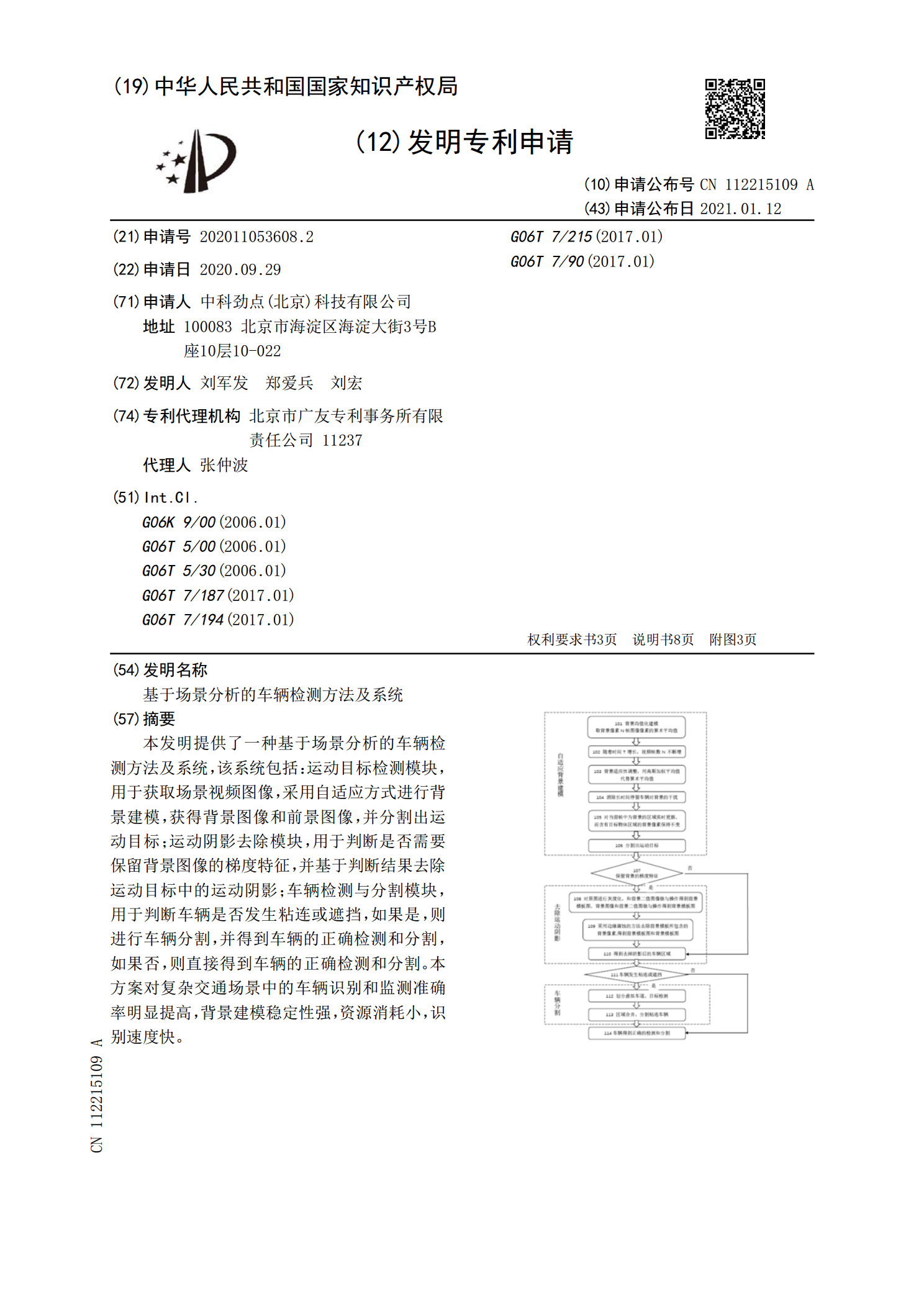
本发明提供了一种基于场景分析的车辆检测方法及系统,该系统包括:运动目标检测模块,用于获取场景视频图像,采用自适应方式进行背景建模,获得背景图像和前景图像,并分割出运动目标;运动阴影去除模块,用于判断是否需要保留背景图像的梯度特征,并基于判断结果去除运动目标中的运动阴影;车辆检测与分割模块,用于判断车辆是否发生粘连或遮挡,如果是,则进行车辆分割,并得到车辆的正确检测和分割,如果否,则直接得到车辆的正确检测和分割。本方案对复杂交通场景中的车辆识别和监测准确率明显提高,背景建模稳定性强,资源消耗小,识别速度快。

基于部件模型的复杂场景车辆检测方法.docx
基于部件模型的复杂场景车辆检测方法随着自动驾驶技术的发展,车辆检测已成为自动驾驶的基本技术之一。在复杂的城市场景中,车辆检测面临着诸多挑战,如光照变化、天气变化、光照反射等问题。因此,基于部件模型的复杂场景车辆检测方法被提出,有效地解决了上述问题。基于部件模型的复杂场景车辆检测方法主要分为以下几个步骤:特征提取、候选框生成、部件检测和车辆检测。首先是特征提取。传统的特征提取方式如HOG、SURF等,在复杂的场景下鲁棒性差,无法准确地检测车辆。因而,使用深度学习的方法提取特征,常见的处理方式是使用卷积神经网

城市交通场景下基于与或图模型的车辆检测方法研究.docx
城市交通场景下基于与或图模型的车辆检测方法研究随着城市化进程的加快和汽车普及率的提高,城市交通问题也越来越引起人们的关注。在城市交通场景中,准确、高效的车辆检测是交通管理、车辆自动驾驶等领域的重要技术之一。因此,本文将基于与或图模型对城市交通场景下的车辆检测方法进行研究探讨。1.车辆检测技术的研究现状车辆检测技术是计算机视觉领域中的一个研究热点。目前,主流的车辆检测技术主要分为传统视觉方法和深度学习方法两种。传统视觉方法主要是基于图像特征进行车辆检测,包括HOG、SURF、SIFT等特征提取方法和支持向量

基于改进YOLOv5s的雾天场景车辆检测方法.docx
基于改进YOLOv5s的雾天场景车辆检测方法标题:基于改进YOLOv5s的雾天场景车辆检测方法摘要:随着车辆数量的增加和交通事故的频繁发生,车辆检测在自动驾驶和交通安全领域中扮演着至关重要的角色。然而,在雾天等低能见度环境下,车辆检测由于影响因素的增加而变得具有挑战性。为了解决这一问题,本文提出了一种基于改进YOLOv5s的雾天场景车辆检测方法。该方法通过优化YOLOv5s网络,提高其在低能见度环境下的目标检测性能,从而实现对雾天场景中车辆的准确检测。一、引言近年来,随着自动驾驶技术的迅速发展,车辆检测成
基于改进FCOS的道路场景多类别检测方法及系统.pdf
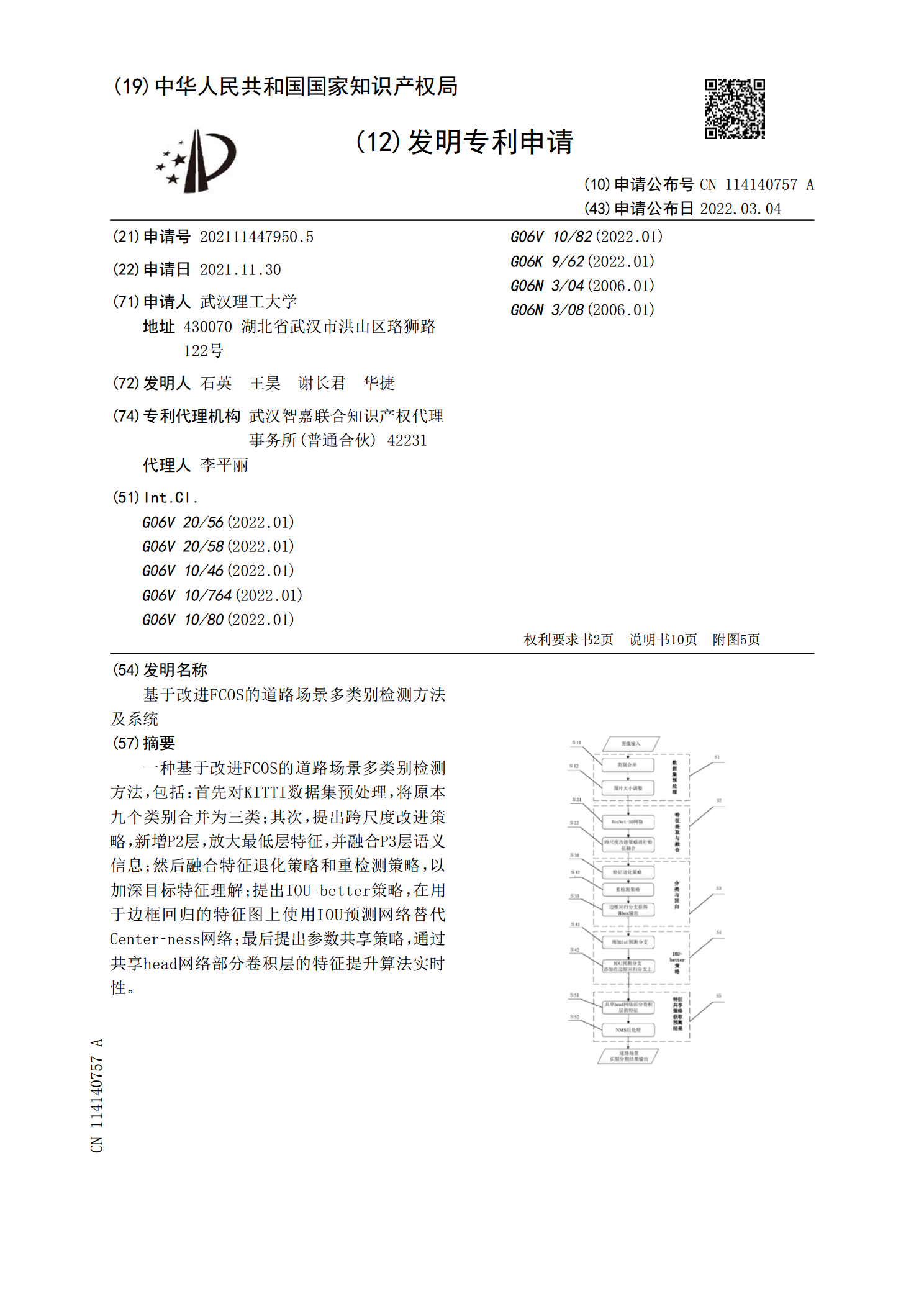
一种基于改进FCOS的道路场景多类别检测方法,包括:首先对KITTI数据集预处理,将原本九个类别合并为三类;其次,提出跨尺度改进策略,新增P2层,放大最低层特征,并融合P3层语义信息;然后融合特征退化策略和重检测策略,以加深目标特征理解;提出IOU‑better策略,在用于边框回归的特征图上使用IOU预测网络替代Center‑ness网络;最后提出参数共享策略,通过共享head网络部分卷积层的特征提升算法实时性。