
基于改进YOLOv5s的雾天场景车辆检测方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于改进YOLOv5s的雾天场景车辆检测方法.docx
基于改进YOLOv5s的雾天场景车辆检测方法标题:基于改进YOLOv5s的雾天场景车辆检测方法摘要:随着车辆数量的增加和交通事故的频繁发生,车辆检测在自动驾驶和交通安全领域中扮演着至关重要的角色。然而,在雾天等低能见度环境下,车辆检测由于影响因素的增加而变得具有挑战性。为了解决这一问题,本文提出了一种基于改进YOLOv5s的雾天场景车辆检测方法。该方法通过优化YOLOv5s网络,提高其在低能见度环境下的目标检测性能,从而实现对雾天场景中车辆的准确检测。一、引言近年来,随着自动驾驶技术的迅速发展,车辆检测成

基于改进YOLOv5s模型的自然场景中绿色柑橘果实检测.docx
基于改进YOLOv5s模型的自然场景中绿色柑橘果实检测1.内容概览本文档致力于详细介绍基于改进YOLOv5s模型的自然场景中绿色柑橘果实检测的相关研究与实践。内容概览部分将简要阐述研究背景、研究目的、主要工作以及章节结构安排,为读者提供一个清晰的导向和全局视角。随着计算机视觉技术的快速发展,目标检测技术在农业领域的应用日益广泛。自然场景中绿色柑橘果实的检测作为农业智能管理的重要环节,对于提高果实计数、产量估算以及采摘机器人导航等任务具有重大意义。由于自然环境的复杂性和光照条件的变化,以及柑橘果实绿色的特殊

基于改进YOLOv5s的遥感图像目标检测方法.docx
基于改进YOLOv5s的遥感图像目标检测方法1.内容综述在遥感图像目标检测领域,随着深度学习技术的发展,YOLOv5作为YOLO系列的最新版本,在保持高准确率的同时,进一步提升了速度和精度。尽管YOLOv5在处理一般场景的目标检测任务上表现出色,但在面对复杂、遮挡严重的遥感图像时,仍存在一定的局限性。为了克服这些挑战,本研究提出了一种基于改进YOLOv5s的遥感图像目标检测方法。本文首先回顾了YOLOv5s的工作原理和架构,指出其在处理大规模数据集时的优势以及在一些典型应用场景中的性能表现。文章详细分析了

基于yolov5s的街道场景检测的实现.pptx
汇报人:CONTENTSPARTONEPARTTWOYolov5s算法原理Yolov5s算法特点Yolov5s算法应用场景PARTTHREE街道场景检测的意义街道场景检测的难点街道场景检测的技术要求PARTFOUR数据预处理网络模型构建训练与优化测试与评估PARTFIVE实验环境与数据集介绍实验结果展示结果分析性能对比分析PARTSIX基于Yolov5s的街道场景检测的优势与不足未来研究方向与展望汇报人:
基于场景分析的车辆检测方法及系统.pdf
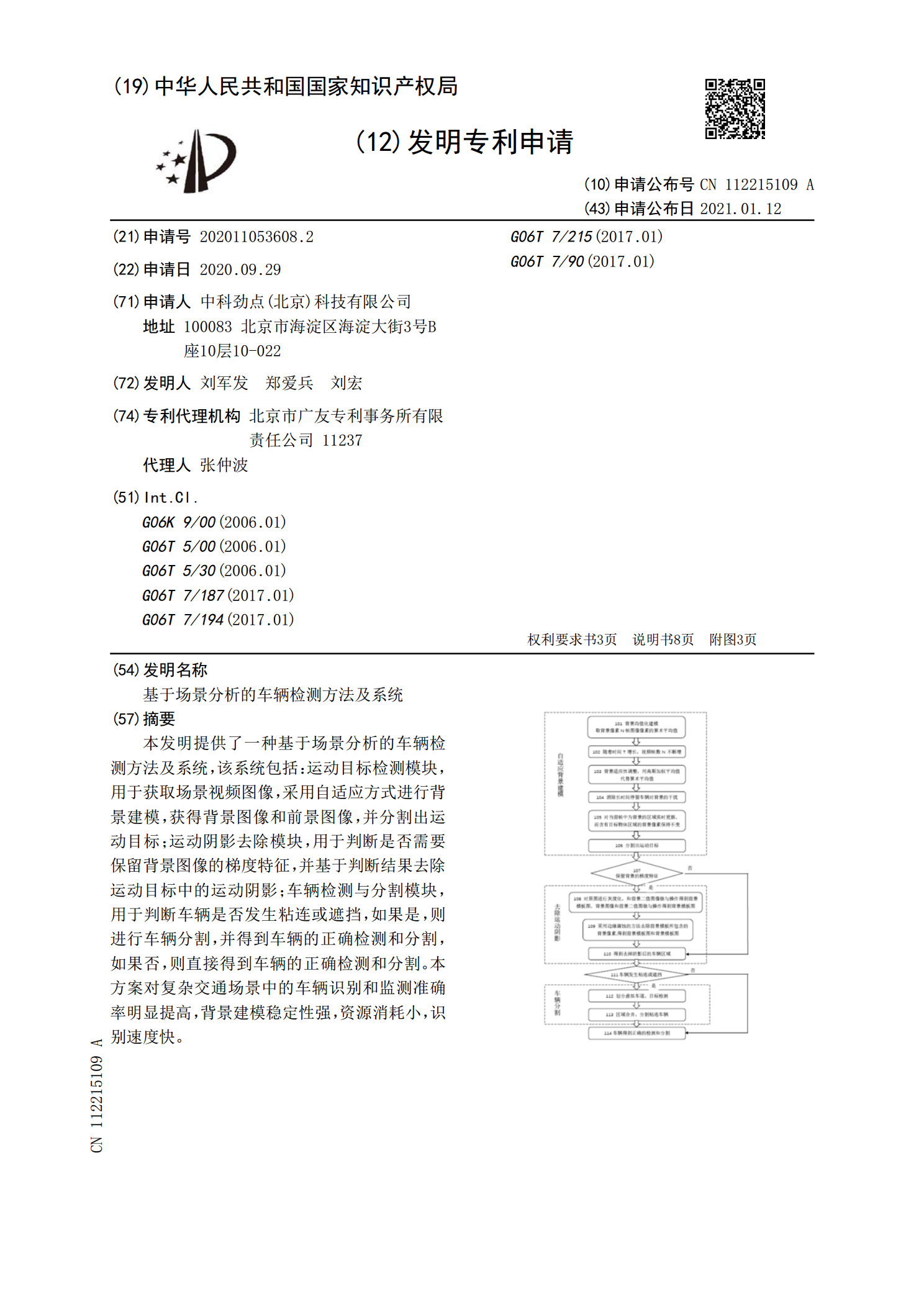
本发明提供了一种基于场景分析的车辆检测方法及系统,该系统包括:运动目标检测模块,用于获取场景视频图像,采用自适应方式进行背景建模,获得背景图像和前景图像,并分割出运动目标;运动阴影去除模块,用于判断是否需要保留背景图像的梯度特征,并基于判断结果去除运动目标中的运动阴影;车辆检测与分割模块,用于判断车辆是否发生粘连或遮挡,如果是,则进行车辆分割,并得到车辆的正确检测和分割,如果否,则直接得到车辆的正确检测和分割。本方案对复杂交通场景中的车辆识别和监测准确率明显提高,背景建模稳定性强,资源消耗小,识别速度快。