
一种联合收获机喂入量在线预测装置及方法.pdf

冷霜****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种联合收获机喂入量在线预测装置及方法.pdf
本发明提供了一种联合收获机喂入量在线预测装置及方法,预测装置包括主控制器、速度采集模块、图像采集模块和留茬及作物高度采集模块,速度采集模块将脉冲信号传输给主控制器,计算收获机实时的作业速度;留茬及作物高度采集模块包括两个激光测距传感器,主控制器通过激光测距传感器发射激光的往返时间,分别计算留茬及作物高度;图像采集模块实时获取前方作物的图片,并传输给主控制器,得到作物的穗头个数;粒子群算法得到的最优个体赋值给BP神经网络的初始权值和阈值,得到喂入量预测模型;作物的穗头个数、收获机的实时作业速度、留茬及作物高
一种谷物联合收获机喂入量检测方法.pdf
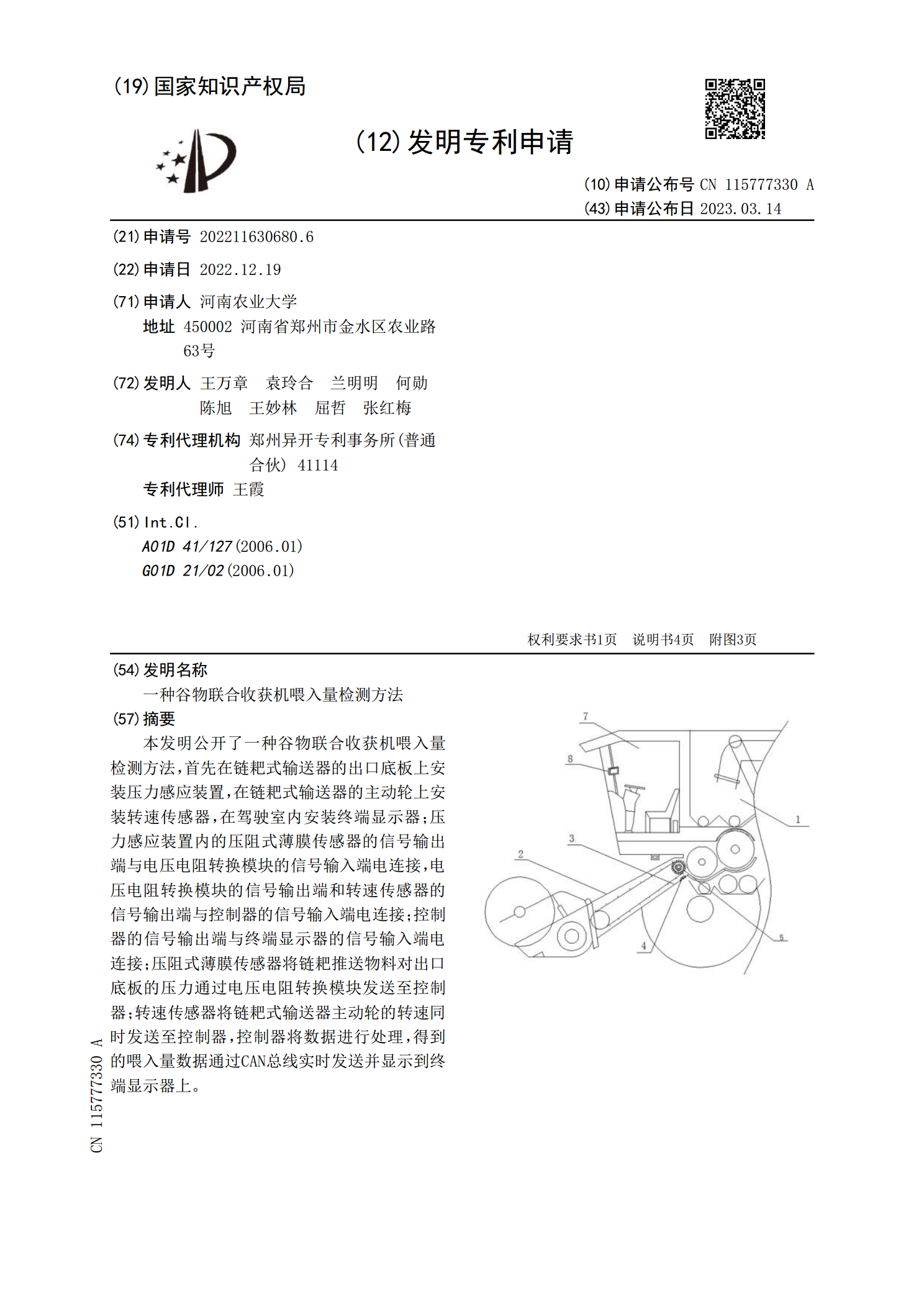
本发明公开了一种谷物联合收获机喂入量检测方法,首先在链耙式输送器的出口底板上安装压力感应装置,在链耙式输送器的主动轮上安装转速传感器,在驾驶室内安装终端显示器;压力感应装置内的压阻式薄膜传感器的信号输出端与电压电阻转换模块的信号输入端电连接,电压电阻转换模块的信号输出端和转速传感器的信号输出端与控制器的信号输入端电连接;控制器的信号输出端与终端显示器的信号输入端电连接;压阻式薄膜传感器将链耙推送物料对出口底板的压力通过电压电阻转换模块发送至控制器;转速传感器将链耙式输送器主动轮的转速同时发送至控制器,控制

一种甘蔗收获机喂入量的控制装置及方法.pdf
本发明公开了一种甘蔗收获机喂入量的控制装置及方法,装置包括:压力传感器,其安装于压蔗辊的液压马达的入口处,用于采集负载压力信号;感应块,其设于车轮的轮毂边缘;霍尔传感器,其设于感应块的一侧,用于通过感应块采集车轮的转速;电液比例流量阀,其用于控制甘蔗收获机的车轮的行走速度;PLC控制器,其输入端分别与压力传感器与霍尔传感器连接,输出端与电液比例流量阀连接,用于获取车轮的正常转速,当负载压力信号超过预设值时,控制车轮低于正常转速;当负载压力信号低于预设值时,控制车轮恢复至正常转速。本发明对喂入量和行走速度实
一种根菜联合收获机扶秧喂入装置.pdf
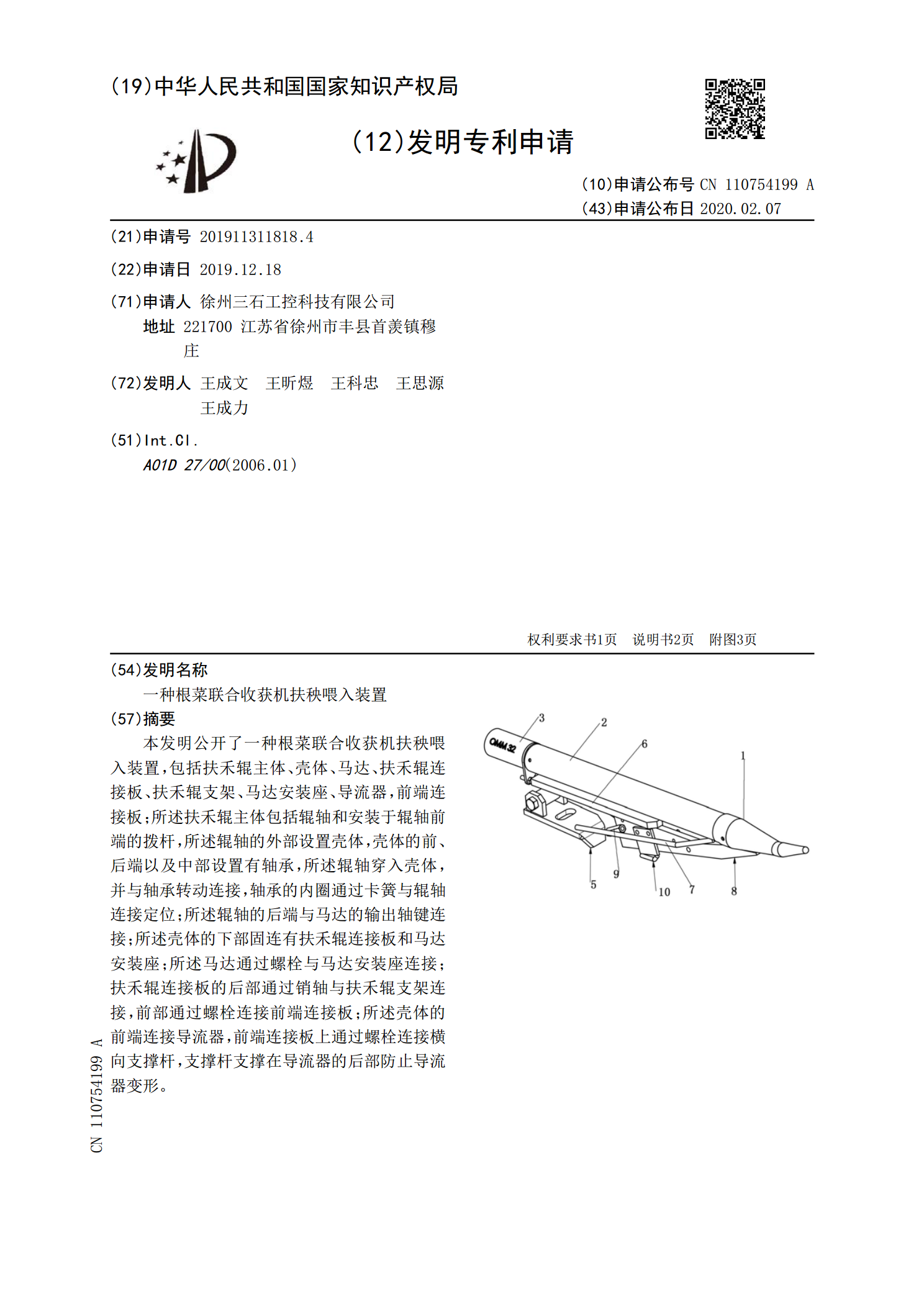
本发明公开了一种根菜联合收获机扶秧喂入装置,包括扶禾辊主体、壳体、马达、扶禾辊连接板、扶禾辊支架、马达安装座、导流器,前端连接板;所述扶禾辊主体包括辊轴和安装于辊轴前端的拨杆,所述辊轴的外部设置壳体,壳体的前、后端以及中部设置有轴承,所述辊轴穿入壳体,并与轴承转动连接,轴承的内圈通过卡簧与辊轴连接定位;所述辊轴的后端与马达的输出轴键连接;所述壳体的下部固连有扶禾辊连接板和马达安装座;所述马达通过螺栓与马达安装座连接;扶禾辊连接板的后部通过销轴与扶禾辊支架连接,前部通过螺栓连接前端连接板;所述壳体的前端连接
联合收割机喂入量测量方法及喂入量监测装置.pdf
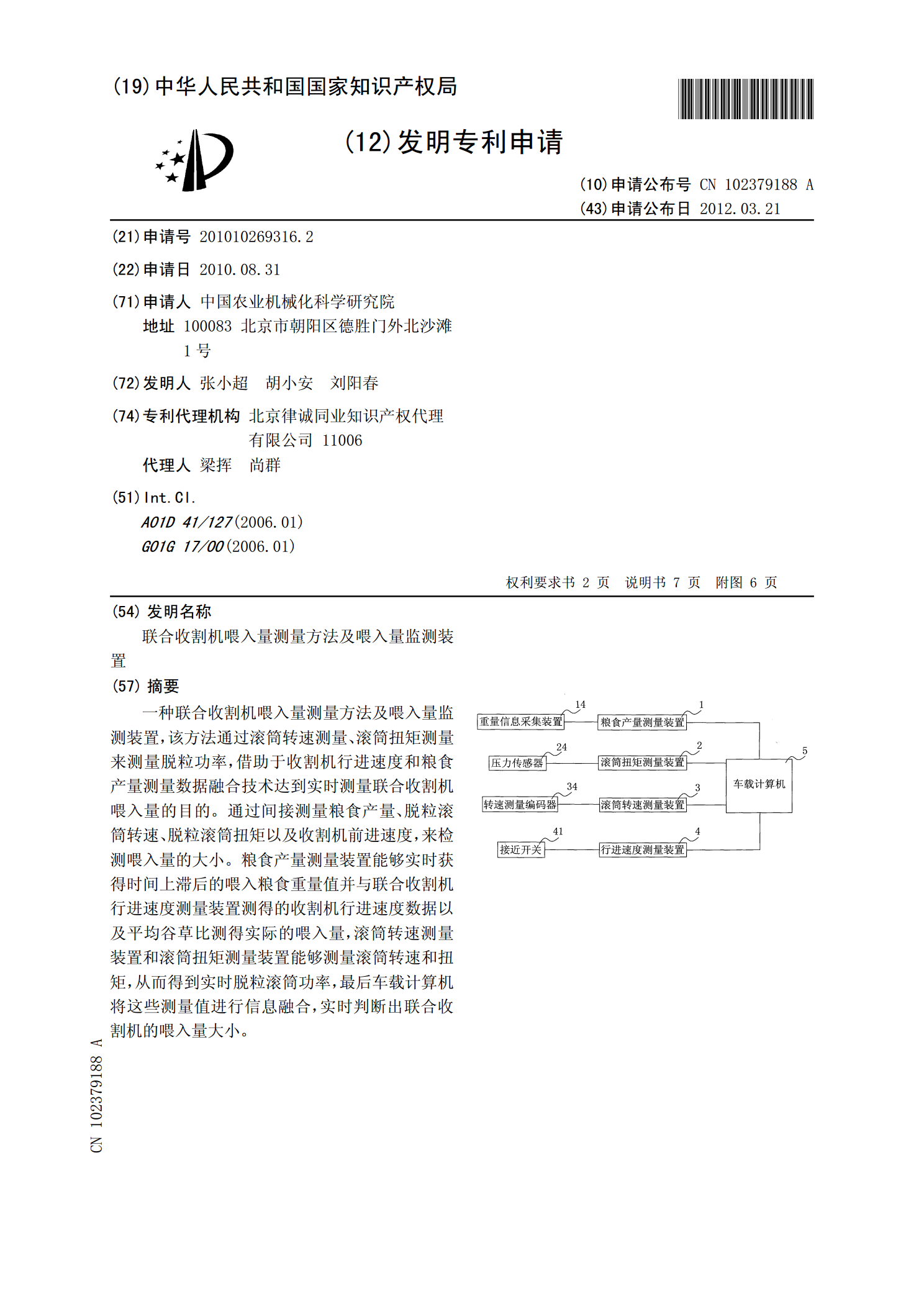
一种联合收割机喂入量测量方法及喂入量监测装置,该方法通过滚筒转速测量、滚筒扭矩测量来测量脱粒功率,借助于收割机行进速度和粮食产量测量数据融合技术达到实时测量联合收割机喂入量的目的。通过间接测量粮食产量、脱粒滚筒转速、脱粒滚筒扭矩以及收割机前进速度,来检测喂入量的大小。粮食产量测量装置能够实时获得时间上滞后的喂入粮食重量值并与联合收割机行进速度测量装置测得的收割机行进速度数据以及平均谷草比测得实际的喂入量,滚筒转速测量装置和滚筒扭矩测量装置能够测量滚筒转速和扭矩,从而得到实时脱粒滚筒功率,最后车载计算机将这