
一种无人驾驶系统激光雷达连续点云的压缩方法.pdf

努力****凌芹


1/4

2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种无人驾驶系统激光雷达连续点云的压缩方法.pdf
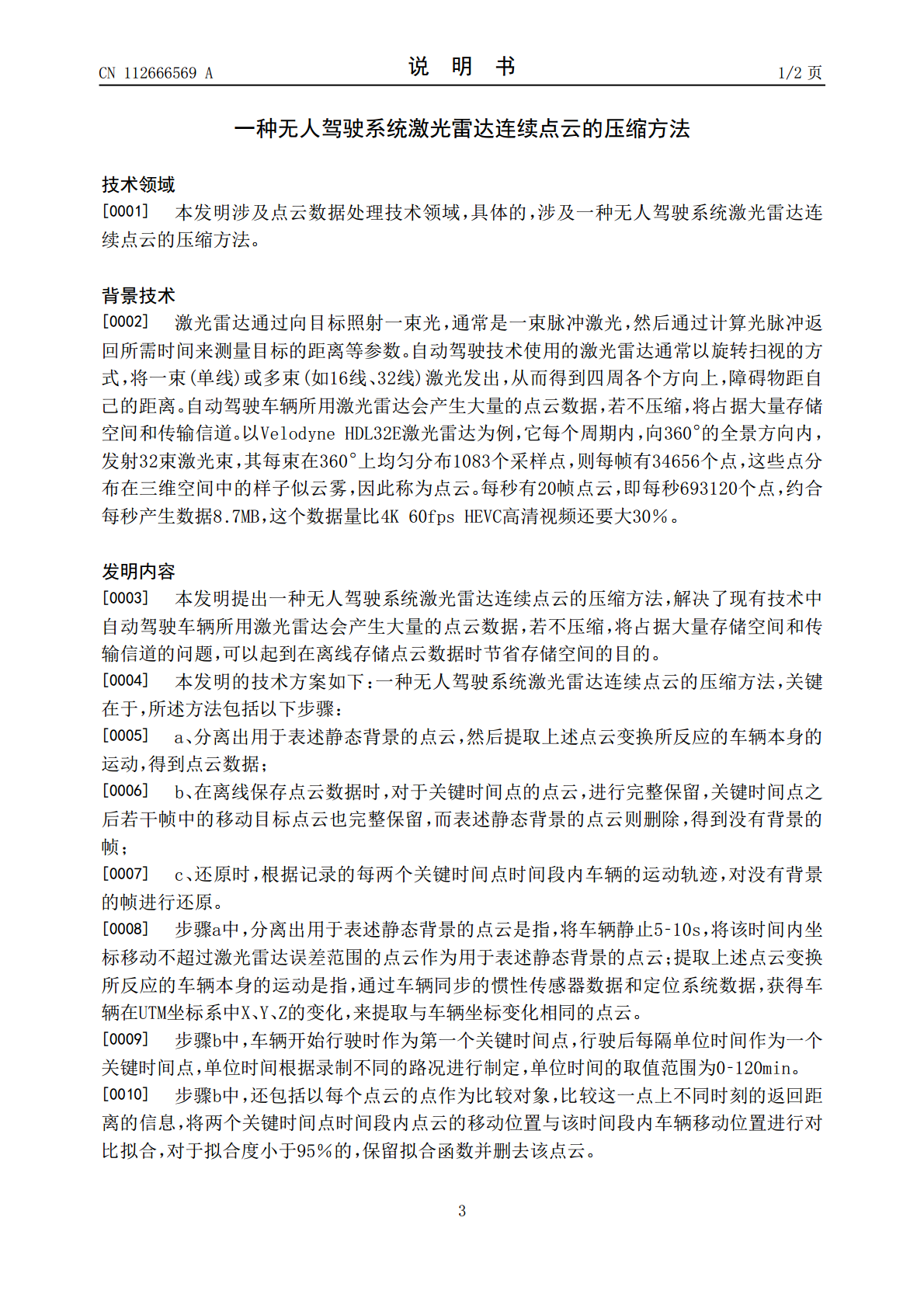
本发明涉及点云数据处理技术领域,提出了一种无人驾驶系统激光雷达连续点云的压缩方法,分离出用于表述静态背景的点云,然后提取上述点云变换所反应的车辆本身的运动,得到点云数据;在离线保存点云数据时,对于关键时间点的点云,进行完整保留,关键时间点之后若干帧中的移动目标点云也完整保留,而表述静态背景的点云则删除,得到没有背景的帧;还原时,根据记录的每两个关键时间点时间段内车辆的运动轨迹,使用合成孔径雷达原理对没有背景的帧进行还原。本方法保存点云各帧之间所体现的背景的移动规律,删掉对应的表述静态背景的点云,可以起到在

基于激光雷达的点云实时采集压缩传输系统及方法.pdf
本发明提出一种基于激光雷达的点云实时采集压缩传输系统及方法,包括:实时采集激光雷达点云,对点云进行自适应编码和封装,实时传输,解封装和自适应解码,渲染可视化并保存本地。本系统具有时间复杂度低,实时性高的优点,根据带宽动态压缩后的数据在低带宽的情况下也可实现可靠低时延的传输,远程实时地观测并处理激光雷达采集的第一手3D点云数据。高带宽情况下该系统还可用于传输多路数据,符合车路协同、远程智能驾驶、机器人视觉等行业对远程采集传输点云数据并进行分析处理的低时延需求。
一种激光雷达点云积分目标检测方法、介质及系统.pdf
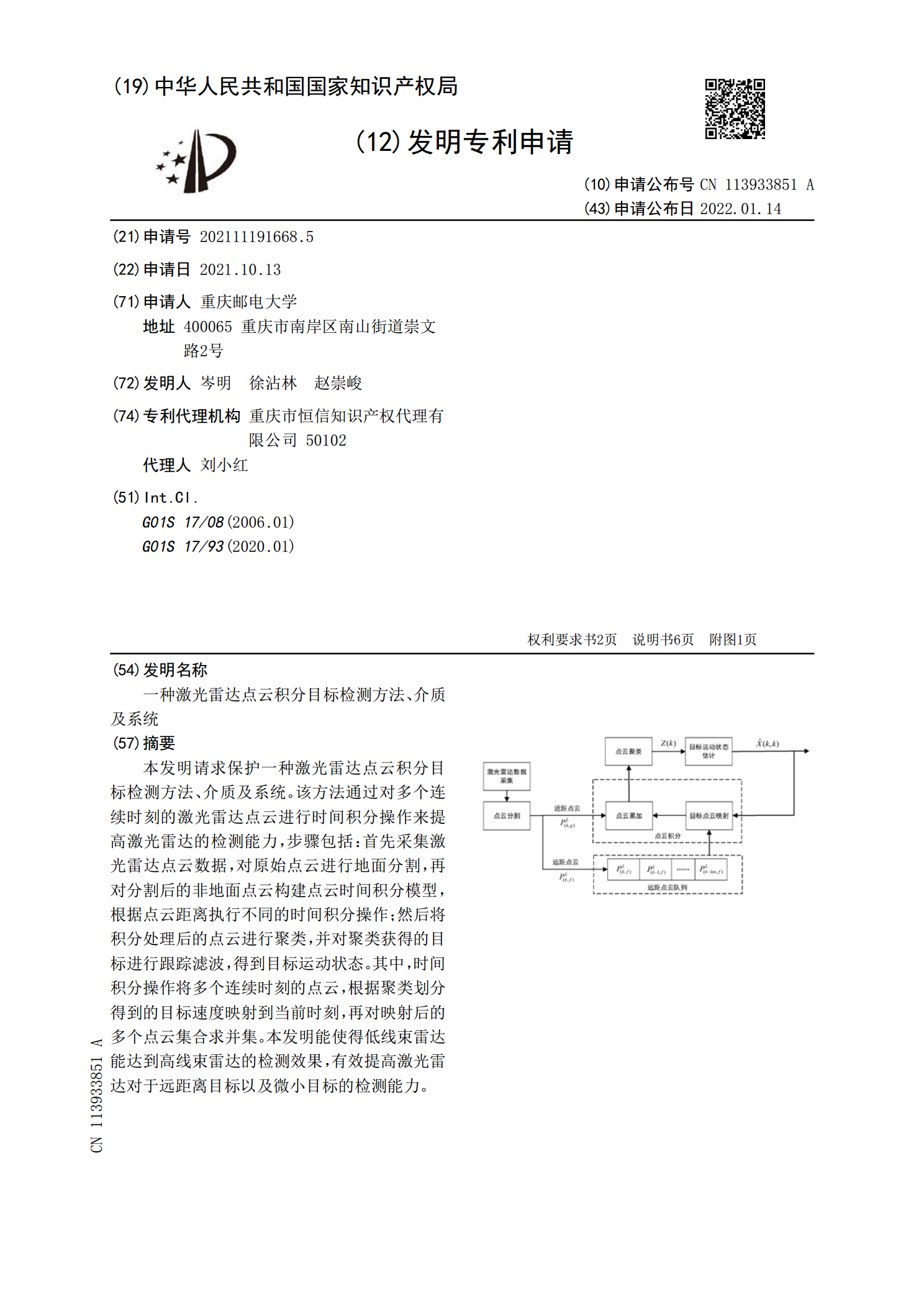
本发明请求保护一种激光雷达点云积分目标检测方法、介质及系统。该方法通过对多个连续时刻的激光雷达点云进行时间积分操作来提高激光雷达的检测能力,步骤包括:首先采集激光雷达点云数据,对原始点云进行地面分割,再对分割后的非地面点云构建点云时间积分模型,根据点云距离执行不同的时间积分操作;然后将积分处理后的点云进行聚类,并对聚类获得的目标进行跟踪滤波,得到目标运动状态。其中,时间积分操作将多个连续时刻的点云,根据聚类划分得到的目标速度映射到当前时刻,再对映射后的多个点云集合求并集。本发明能使得低线束雷达能达到高线束
激光雷达点云质量评估方法、系统及装置.pdf
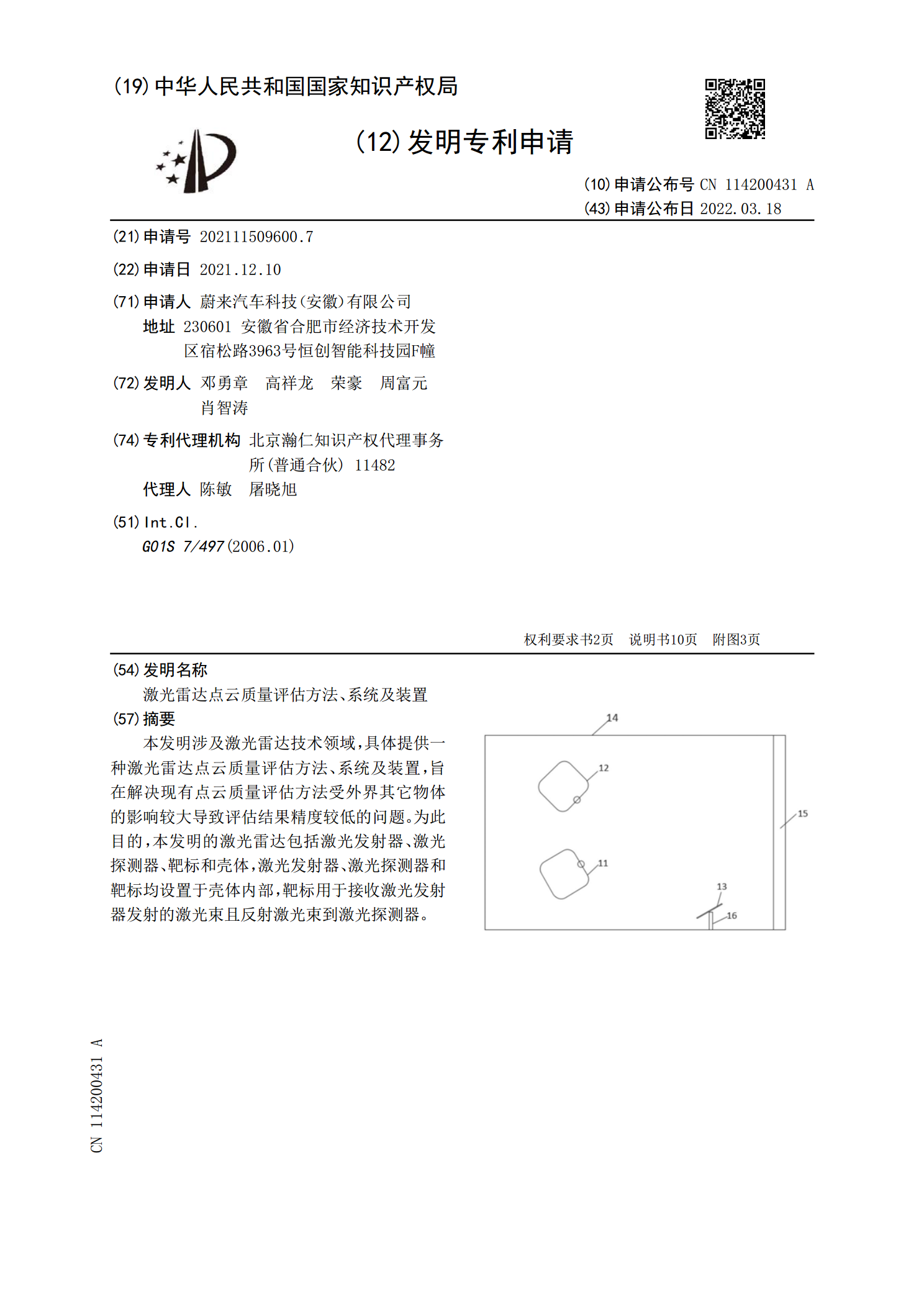
本发明涉及激光雷达技术领域,具体提供一种激光雷达点云质量评估方法、系统及装置,旨在解决现有点云质量评估方法受外界其它物体的影响较大导致评估结果精度较低的问题。为此目的,本发明的激光雷达包括激光发射器、激光探测器、靶标和壳体,激光发射器、激光探测器和靶标均设置于壳体内部,靶标用于接收激光发射器发射的激光束且反射激光束到激光探测器。

激光雷达点云目标检测方法、系统及装置.pdf
本发明公开了一种激光雷达点云目标检测方法,对点云信息构建前视图栅格,分别对前视图栅格提取特征以及对每一个前视图栅格内最近点提取点特征并结合,再通过三维目标检测器检测障碍物。本发明对高分辨率点云信息能够有好的保留,使得检测性能更好。